研究所に着くと、部門の
責任者は私たちの将来の職業について次のように語っています。「私たちの職業は非常に重要で責任があります。今、あなたはロシアの航空の将来の旗艦の出現に取り組んでいます。あなたはアイデアでシャワーを浴び、彼が解決するタスクを予測し、責任を負い、決断を下します。そして15年後、飛行機がようやく完成すると、誰もが名誉を手に入れられますが、誰もあなたのことを覚えていません。」
私はこのキャンペーンが気に入らなかったので、結果が出るまで15年待つ準備ができていません。
航空業界は高度に発展した産業ですが、高い信頼性要件と将来の計画により、新しいテクノロジーを迅速に導入することはできません。一方、ドローンは特別な要件がまだないため、雨の後でキノコのように成長し、大気監視、広告、農業支援、ビデオ撮影などのニッチを埋めます。
それで、私は彼らに私なしで戦闘機を何とか作らせることにしました、そして私が若くて暑い間、私はドローンに行きます。幸いなことに、過去の航空機モデルがあります。
航空開発の方法は何ですか?私の意見では、航空は次の2つの方法で発展します。
- コンポーネントのための革新的な技術の使用(軽量、航空電子工学などの新しい効率的な発電所)。
- 空力設計の変更。
航空機の空力設計の変更に感銘を受けました。このようにして、「アヒル」や「フライングウィング」などの空力スキームが登場しました。しかし、これはエンジニアにとって十分ではなく、飛行中に空気力学を直接変更することを望んでいました。これは、可変翼形状の航空機(Su-24、Tu-22M、Tu-160、F-111など)、推力ベクトルが制御された航空機(MiG-29OVT、MiG-35、Su-30、37、57、 F-22など)、そしてもちろん、ティルトローター(たとえば、よく知られているBell V-22 Osprey)です。
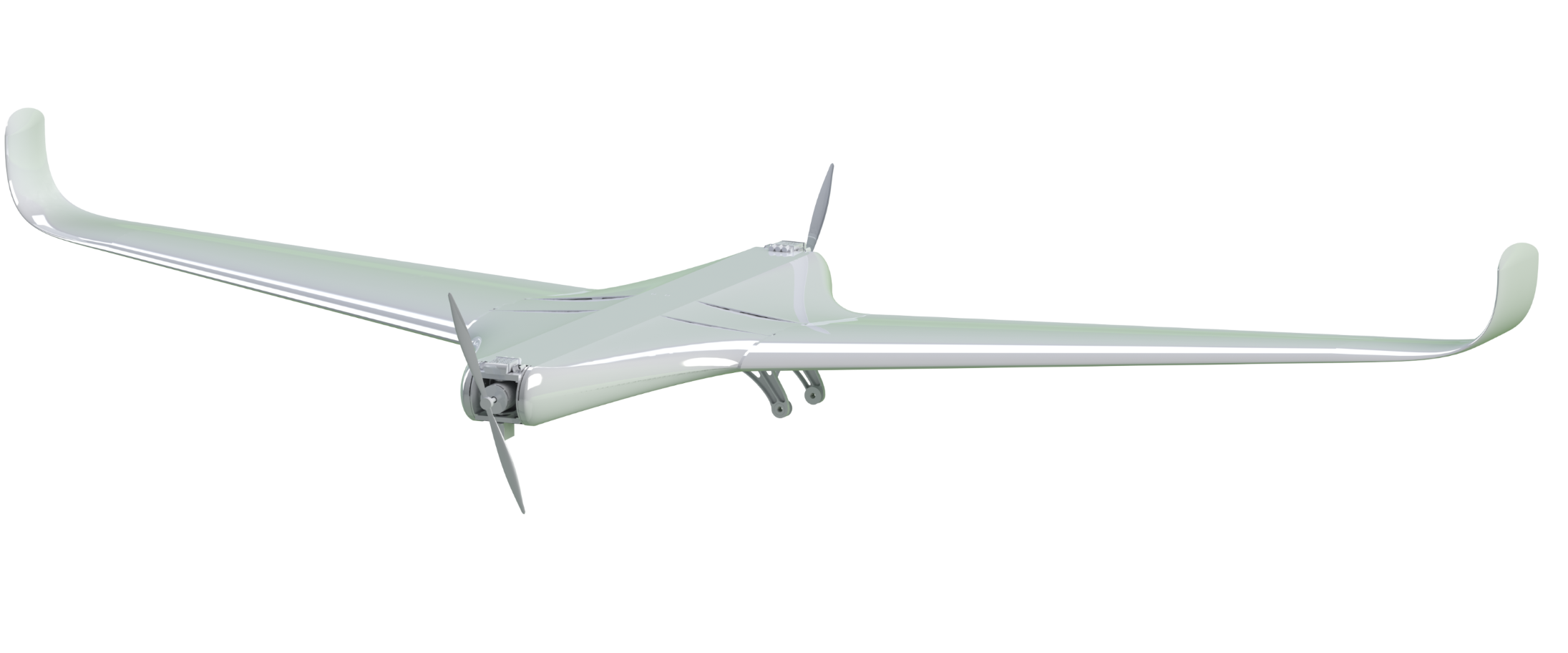
もちろん、これはすべて問題ありませんが、完全に私の好みではありません。翼の形状が可変であるという考えは興味深いですが、翼が折りたたまれている場合は、折りたたまれているため、惨めな数度ではないことが必要です。しかし、回転発電所のアイデアは私には魅力的です。アイデアはあなた自身の転換飛行機を作るために生まれました。私たちのアイデアは、次のように概略的に説明できます。
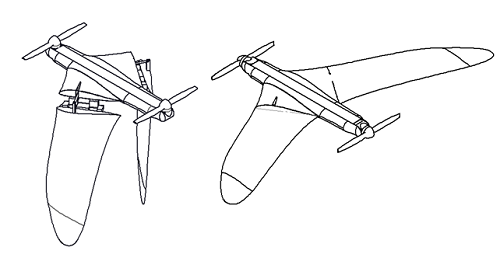
私はチームをまとめ、すぐに決定しました。私たちの転換式飛行機のアイデアは、飛行翼飛行機スキームと2軸縦型ヘリコプタースキームを組み合わせることでした。ヘリコプターモードで上昇するときに追加の抗力を作成しないように、翼は船の飛行機のように翼の半分ではなく、完全に折りたたむことを決定しました。
ティルトローターは翼を垂直に倒した状態で離陸し、モーターが回転して翼がスムーズに開きます。飛行自体は飛行翼モードで行われ、必要に応じて、いつでもその場でホバリングできます。着陸時は、垂直に、腹に、または緊急着陸の場合はパラシュートに座ることができます。
この空力設計の利点は何ですか?
- 巨大な翼があるため、飛行機モードでは空力特性が高く、他のティルトローターと比較して飛距離が大幅に向上します。
- 垂直離着陸(滑走路は不要)。
- 宙に浮く能力。
紹介を終えて、要点に進みます。必要なプロジェクトを実装するには:
- プロトタイプを作成します。
- 制御された推力ベクトルによる安定化システムを作成します。
- .
- , .
- .
1
最初のプロトタイプの作成を開始しました。特別な機器はなく、手と基本的な知識しかありませんでした。まず、モデルを3Dで描画します。

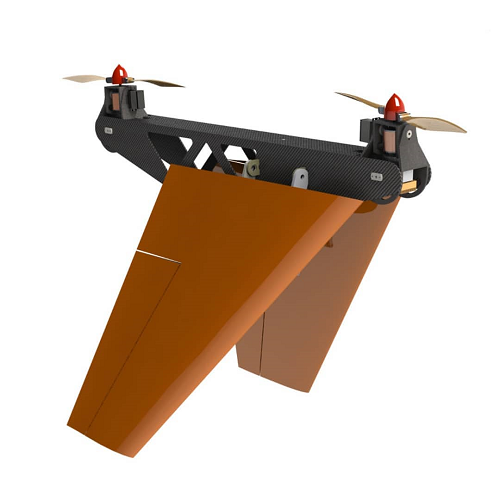
組み立てられた航空機は次のようになりました。


最初のモデルが得られ、すぐにテストベンチを準備しました。
私たちはモーターを制御するための簡単なコードを書き、このモンスターを最初にスタンドで、次に空中で発射しました。私たちは彼女といくつかの会議に行き、そこで混合レビューを受けました。最初のプロトタイプを作成するとき、計算を深く掘り下げることはせず、提供できる唯一のlthはその寸法です。巡航速度は時速100 kmで計算されましたが、長距離飛行では少なくともいくつかの特性を記録することはできませんでした。
| 折りたたみ寸法 | 650mm x 400mm x 600mm |
| 範囲 | 1100mm |
| 長さ | 650mm |
| プロペラ径 | 11インチ |
| 縁石重量 | 3キロ |
構築されたモデルが私たちの期待を満たさなかったという事実にもかかわらず、それは間違いなくそのようなデバイスがまだ生きる権利を持っていることを示し、また私たちに次のことをさせることができました:
- モーターの傾斜機構の設計を決定します。
- そのようなモデルの実現可能性を確認してください。
- モデルの外観を定式化。
- すべてのメカニズムの視覚モデルを手に入れました。
率直に言って、私たち自身は、プロトタイプを作成でき、それが機能することを期待していませんでした。
このプロジェクトの参加者全員がさまざまな研究所で研究を始めた後、私たちはこのプロジェクトを放棄しました。徐々に、チームはどこかで別れた。私の研究所での研究が終わり、卒業プロジェクトが近づいていたとき、この飛行機に戻るという考えが私たち全員に思い浮かびました。そのようなユニットが多面的であることを誰も疑うことはなく、誰もがそこで常に仕事を見つけるでしょう。したがって、それぞれが彼の専門にできるだけ近い作品を取りました...
プロトタイプ2
どういうわけか、美しさ、配管工、観光客、ITスペシャリスト、そして男子生徒に出会いました。そして配管工は、「卒業証書は近いです。飛行機を建てる必要があります」と言います。
私たちは再び集まり、2番目のプロトタイプの作成を開始しました。これで私たちは自由に使えるようになりました。最新のテクノロジーを備えたガレージ、旋盤、CNC、3Dプリンター、そして研究所で得た経験と知識。私たちはすぐにドローンの目的を決定しました、それは石油パイプラインを監視します。このタスクに最適なパフォーマンス特性が選択されました(これは別の話です)。すべてのユニットとアセンブリを計算して描画しました。救助システムを計算し、パラシュートを縫い合わせました。翼を開閉するシステムを開発。次のパフォーマンス特性を備えたプロトタイプを作成しました。
| 仕様書 | ||
| モード | 飛行機 | ヘリコプター |
| 飛行時間 | 最長2.5時間 | 20分まで |
| 最大ルート長 | 100キロ | 10キロ |
| 飛行速度 | 時速70〜150 km | 毎時0〜50キロ |
| 最大離陸重量 | 20キロ | |
| マックス。ペイロード質量 | 2キロ | |
| 寸法 | 翼幅3200mm、
長さ1600mm |
1500mm x 900mm x 1600mm |
| G最大飛行高度 | 2500メートル | 1200メートル |
| エンジン | 電気の | |
| 離陸着陸 | パラシュート緊急着陸システム | ドッキングステーションを使用して垂直に自動モードで |
| 離陸/着陸時間 | - | 5分 |
| 飛行特性 | ||
| モード | 飛行機 | ヘリコプター |
| 巡航速度 | 時速100 km | 37 km / h |
| 上昇率 | 1.3メートル/秒 | 2.5メートル/秒 |
| 飛行速度 | 時速70〜150 km | 毎時0〜50キロ |
| 変革に必要なスピード | 時速45 km | - |
| ストール速度 | 42 km / h(1.5kgペイロード) | - |
| 空力品質 | 11.6 | 0 |





プロトタイプが作成され、MAKS-2019に参加し、「ロシアのヘリコプター」からのコンテストに参加し、自由時間にその改訂に取り組み続けました。
結論
あなた自身の道を行くことは常に信じられないほど難しいです。もちろん、これは素晴らしいことだと常に言われていますが、機能せず、飛ぶこともありません。あるいは、機能的な状態にしたいという願望が十分にありません。しかし、建設的な批判を聞いてうれしいです。
私達はまだ私達の計画を空中で見たいという欲望に「燃えています」そして私達はこれに可能な限りの努力をしています。
PS
このプロジェクトでは、目標と目的を設定するときに、監視タスクにおけるRPVの要件と条件に導かれます。他の業界で作成されたアプローチとプロトタイプのすべてのアイデアの適用は、現在設定されている目標が達成された後にのみ検討できます。資材、労働力、時間のリソースが限られている状況では、このアプローチは合理的だと思います。このプロジェクトに取り組む過程で、これらの意見を頻繁に使用しました。自分が実際に何をしているのかを楽しみにしています。