
這うために生まれて飛ぶことはできません。翼のない生き物(または同様に機能する身体の部分)は本当に天国を征服することができないため、このフレーズは比喩的な意味と文字通りの意味の両方で使用できます。少なくともそれらのほとんど。例外がなければ、ルールはルールにはなりません。翼のない飛行の側面では、例外もあります-装飾された木のヘビ(Chrysopelea)。ヘビのこの属の代表者は、地面より高い木の樹冠に住んでいることを考えると、非常に有用なスキルである急上昇が可能です。バージニア工科大学(アメリカ)の科学者たちは、カイネティクスの観点からカイトの飛行を検討することを決定しました。ヘビが飛ぶことができる(制御された方法で正確に落下する)ことができる解剖学的特徴、運動学の観点から飛行中に何が起こるのか、そしてこの研究がロボット工学にどのように役立つのか?これらの質問への答えは科学者のレポートで私たちを待っています。行け。
研究の基礎
装飾された木のヘビは、南アジアおよび東南アジアで見られる蛇紋岩のヘビの属です。この属の代表者は大きな寸法(体長が0.6〜1.5 mのみ)と致命的な毒を誇ることはできません。彼らが昼間に狩る獲物は後者に反対するでしょうが。生息地(樹冠)を考えると、これらのヘビには敵がほとんどいないため、強い毒を特別に必要としません。さらに、彼らははるかに効果的な戦術を持っています-彼らは計画する方法を知っています。

飛行ヘビは、人々からも呼ばれているように、腹部に沿って硬い体重計を使って木々の間を這い、垂直に動くことができます。ヘビがあるツリーから別のツリーに移動したい場合、まず最初に枝の端まで忍び寄り、体をラテン文字「J」の形に折りたたんで狙います(目的の離陸角度と着陸地点を決定します)。 「行こう」と言って、ヘビは体を前方に押し上げ、胃を引き込み、肋骨を突き出します(体が平らになり、やや凹状になります)。滑走中、ヘビは常に左右に曲がりくねった体の動きをするため、飛行を制御してソフトに着地することができます。
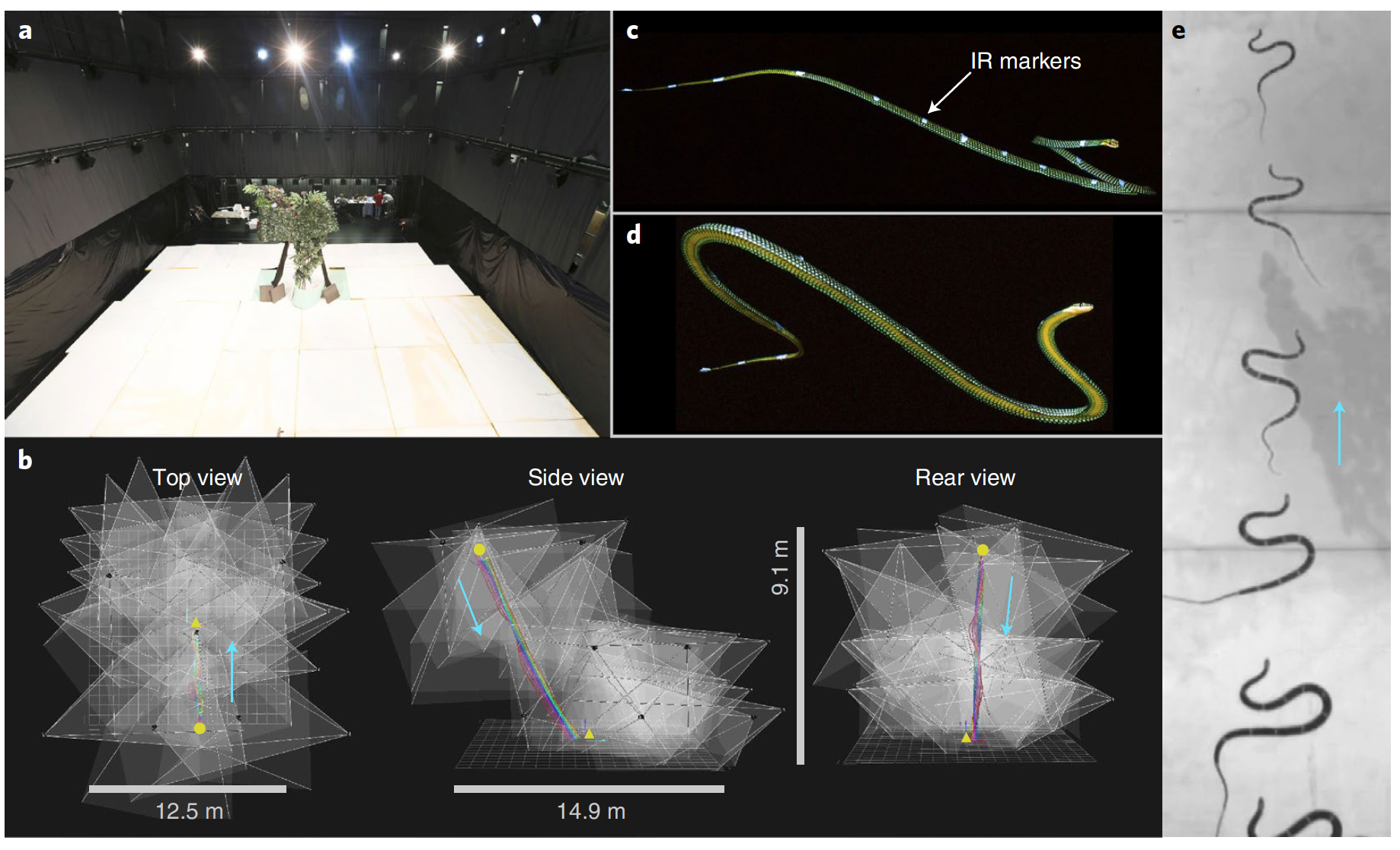
長い滑空飛行のヘビChrysopelea paradisiの側面図。
ヘビでは非常に珍しい移動方法の追加の利点は、飛行が木から木へとゆっくりと地面を這うよりもはるかに高速(かつ安全)であるため、印象的なエネルギー節約です。この短い説明だけでも、凧揚げのメカニズムには多くの重要な要素があることは明らかです。離陸角度、離陸および飛行中の体型、飛行中の体の動きなど
特に観察者にとって最も印象的なのは、蛇の飛行の側面が体の波打つ動きです。この手法は、地球上の多くの生物が地球上や水上を移動するために使用されます。ヘビ自体が完全に使用するので、遠くに行く必要はありません。科学者たちは、陸と水のうねる動きはかなりよく研究されてきたと述べていますが、空気中のそのようなピルエットはまだ謎です。Chrysopelea
ヘビでは、うねりはS字型のボディ形状、低いうねり周波数(1〜2 Hz)、およびボディの空気力学的断面の平坦化によって特徴付けられます。Image No. 1 実際、風通しの良いうねりは、蛇の体を継続的に再構築し、翼の形に変えます(1
)。以前の研究では、凧揚げは常に飛行中に波状の動きをすることを示しています。ただし、うねりが飛行の成功に欠かせない要素なのか、それとも単なる習慣なのかは不明です。陸上での動きの行動的側面。意図せずに飛行に移行した。
陸や水のうねりを考慮すると、空気中では推力が発生すると考えられます。固体媒体では、波状の運動は、身体の腹側と側方の領域に分散した接触力が原因で発生し、水中では、身体に沿った流体の移動または吸収が前方への動きを引き起こします。どちらの場合も、正味駆動力は主にうねり平面で作用します。面外(垂直)ボディ変調は、抵抗の減少や通常の強度の増加などの二次的な目的に使用できます。
しかし、飛行凧の場合、計画を成功させるには、動物の体重を補うために必要な空気力を発生させる必要があります。揚力と抵抗力は、重力によって下向きに加速されたときに、平らにされたボディを流れる空気によって作成され、筋肉の収縮によって生じる往復運動は、おそらく力の発生を増加させません。
飛んでいるヘビChrysopelea paradisiの離陸と平坦化の正面図。
結果として生じる空気力学的な力は、うねりの平面の外側で作用する必要があり、うねり自体がヘビの体にかかる力の分布を絶えず変化させなければなりません。飛んでいる凧が水平方向だけでなく垂直方向にも「心配」する可能性があることも考慮する価値があります。これは、カイトフライトモデルにピッチ*要素とロール*要素の両方が含まれていることを意味します。
ピッチ* -慣性の水平横軸に対する角度の動き。この研究では、科学者たちは凧の飛行におけるうねりの役割を詳しく調べることにしました。ヘビの飛行の高速映像を使用して、科学者は空中のうねりを定量化することができました。得られたデータは、凧揚げの正確な三次元モデルを作成することを可能にしました。
ロール* -縦軸に対する角度の動き。
研究成果
空気のうねりは、水平方向と垂直方向の曲げの波の束で構成されています。飛行調査に参加しているヘビ(7人)の体に沿って11〜17個のマーカーが配置されました(高い離陸領域は8.3 m)。これらのマーカーの位置の変化を評価することで、飛行中のうねりの構造を正確に特定できます。
空飛ぶヘビChrysopelea paradisiのテストグライドの平面図。
Chrysopelea paradisiフライングカイトの計画中に取得した赤外線マーカー。
36の実際的な観察の後、科学者はヘビの体の3次元モデルを作成しました(r)。
モーションキャプチャデータに基づく、飛行中のヘビChrysopelea paradisiの3Dモデルの開発。
接線ベクトル(t̂ =∂r/∂s)を使用して、うねりを、身体に沿って移動する2つの角度のある曲げ波に分解することができました。
:水平および垂直波は次式で与えられる
θ(S、T)= -tan -1 T X / TのY
及び
ψ(S、T)=罪-1 T Z
θ(s、t)およびψ(S、T )弧の長さsと時間tの関数として、ボディが水平方向と垂直方向に対して形成するローカル角度です。
このデータは、飛行凧が2つの波を使用することを示しています。振幅が大きい水平波と振幅が低い垂直波の両方で、どちらも頭から尾にかけて身体を連続的に通過します(画像2)。

画像#2
これらの波は、ヘビが比較的まっすぐな姿勢でジャンプし、その後、滑空のための特徴的なS字型の姿勢を形成するときに、最初の過渡現象の後に形成されます。
垂直波と水平波を接続する空中起伏には4つの特徴があります(2a)。まず、垂直波は、水平波の2倍の空間周波数と時間周波数を持っています。これは、ボディの垂直方向の曲がりが横方向の曲がりの2倍であることを示しています(2a、2f)。次に、フライングカイトの胴体のUベンドは、ベンド角度のグラフでゼロ交差として識別できます(2b)。第三に、これらのクロスオーバーは垂直波高であり、水平波と垂直波の位相が90°ずれていることを示しています。第4に、最大の面外曲げは、Uベンドと直線セグメント間のほぼ中間で発生します。 Uベンドでは、ヘビの「翼」の断面は、平面外の物体の動きによって折りたたまれます(1c、1d)。
カイトが加速して空力を発生させると、進行波の形状は時間とともに変化しますが、いくつかの機能はまだ一般的です。水平波はフラットトップの正弦波であり、その振幅(80〜120°)は空間周期の数に依存し、周期が少ないほど水平曲げ角度が大きくなります。垂直波は、20°〜45°の範囲の振幅を持つ広い谷を持つ狭いピークの正弦波です。
波の空間的および時間的特性の定量化は、凧が1〜1.5の空間周期と1〜1.7 Hzのうねり周波数の水平波と2〜3の空間周期と2〜3.4 Hzのうねり周波数の垂直波を使用することを示しました。
空気のうねりには、科学者が「背腹曲がり」と呼んでいる追加の要素があり、頭に対する体の後部の上下の動きを表しています。この曲がりの傾斜角度は-20°から30°の範囲でした。観察されたフライトには常に背腹曲がりがありましたが、空間周期の数との重要な関係はありませんでした。
水平波と垂直波の間の関係の影響度、および飛行力学に対する背腹屈曲の影響度を正確に決定するために、科学者は飛行中のヘビの解剖学的に正確なモデルを作成しました。科学者によれば、モデルを制御することで、うねりの成分(水平波の振幅、空間周期の数、うねりの周波数)が短期および長期の計画のダイナミクスにどのように影響するかを体系的に確認できます。
水平波は、大振幅の平坦な上面を有する正弦波としてモデル化され、縦波が小振幅の正弦波としてモデル化される:
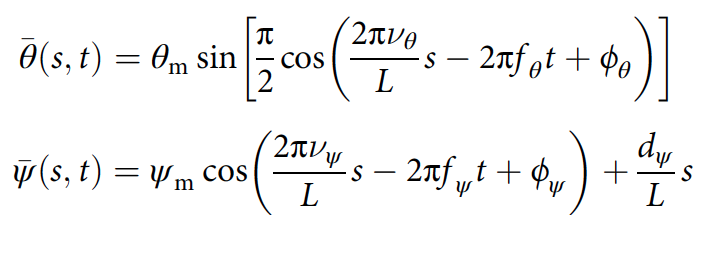
θ Mとψ mは最大水平および垂直方向の曲げ角度です。 νは空間周期の数です。 f-うねりの頻度; ϕ-位相シフト; D ψ -背腹曲げ角度。 Lはボディの長さ(2f、2g)です。
水平および垂直波は運動学的データ(に関連している2):ν ψ =2ν θ、fはψ = 2F θ及びφ ψ = 2(φ θ-π/ 2)。θ:これは非常に体の形状を決定する5つの変数にモデルを簡素化し、M、ψ M、ν θ、F θおよびd ψ。
次のように質量の中心に対する本体の位置r = [X、Y、Z]は計算する:∂ S X =cosψ̅sinθ̅、∂ S Y =-cosψ̅cosθ̅と∂ S Z =sinψ̅。
重心の位置R 0とボディの方向(ヨー角*、ピッチとロール)は、並進運動と回転運動の方程式を統合することによって決定されます。
ヨー* -垂直軸を中心とした角運動。
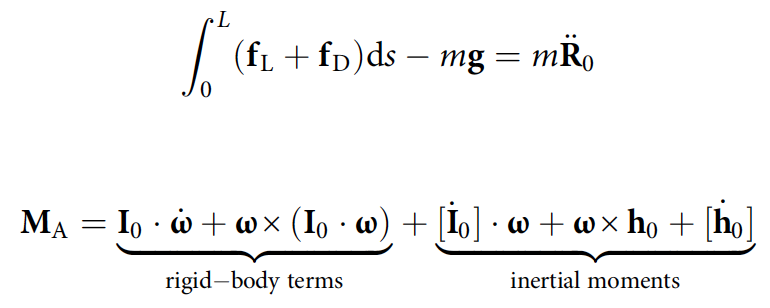
ここで、f Lおよびf D-微小な揚力および抵抗力; M A-空力モーメント; mはヘビの質量です。
数学モデルが物理的に現実的な結果を生成することを確認するために、科学者は実際の凧の実際の滑空観測から得られたパラメーターを使用して飛行をシミュレートしました(シミュレーションと観測の比較を下の画像に示します)。

画像#3
比較すると、モデルは機能しますが、将来修正する必要があるいくつかのマイナーな不正確さがあります。
計画特性に対するうねりの影響を確認するために、fθ = 0 Hz(うねりなし)とfθの 2つのシミュレーションを実行しました= 1.2 Hz(ヘビのうねりの平均周波数)。両方の場合において、ν θとθ mはした変化(4aに)。

画像番号4は、
モデル内の蛇のボディ形状の動データは1つの≤νと121の形状を得ることが可能となるθ ≤1.5 本体90°≤θ範囲内波と水平波振幅M ≤119°。さらに、観測された身体形状はこの配列から抽出されました(グラフの中央部分、対角線に沿って分離された; 4b)。下のグラフの強調表示された部分には、「開いた」(文字Sに似た)ボディ形状が含まれており、上部は「閉じた」(無限大の記号に似ています)。
垂直波の振幅と背腹角は一定のレベルに維持されました:それぞれ20°と10°。ヘビの重心が地面に着地したとき(着陸時)、または方向角のいずれかが85°のしきい値を超えたときに、シミュレーションは完了したと見なされました。これが起こった場合、計画は不安定であると考えられました。自然と同じではありません。シミュレーション中に、短期的なダイナミクス(開始高さ10 m)と長期のダイナミクス(開始高さ75 m)の両方のうねりの有無をテストしました。
モデルは、空気のうねりが計画特性にプラスの影響を与えることを示しています。通常、シミュレートされたヘビが不安定になる前に移動する水平距離と垂直距離が増加します。
うねりがある場合とない場合の空飛ぶヘビの滑走のシミュレーション。
打ち上げ高さが10 mの短い計画では、うねりが存在する場合でも安定係数が良好でした(94%)。起伏がモデルに含まれていない場合、フライトの50%のみが安定していました。うねりも計画距離を増やします(4 mから4.3 mに)。
75 mの高さから計画をモデル化すると、打ち上げの86%で不安定性が現れる前に、起伏が水平距離と垂直距離の両方を増加させました。この場合、うねりも発射の92%で飛行距離を伸ばしました。うねりも平均水平距離を6.9 m増やしました。
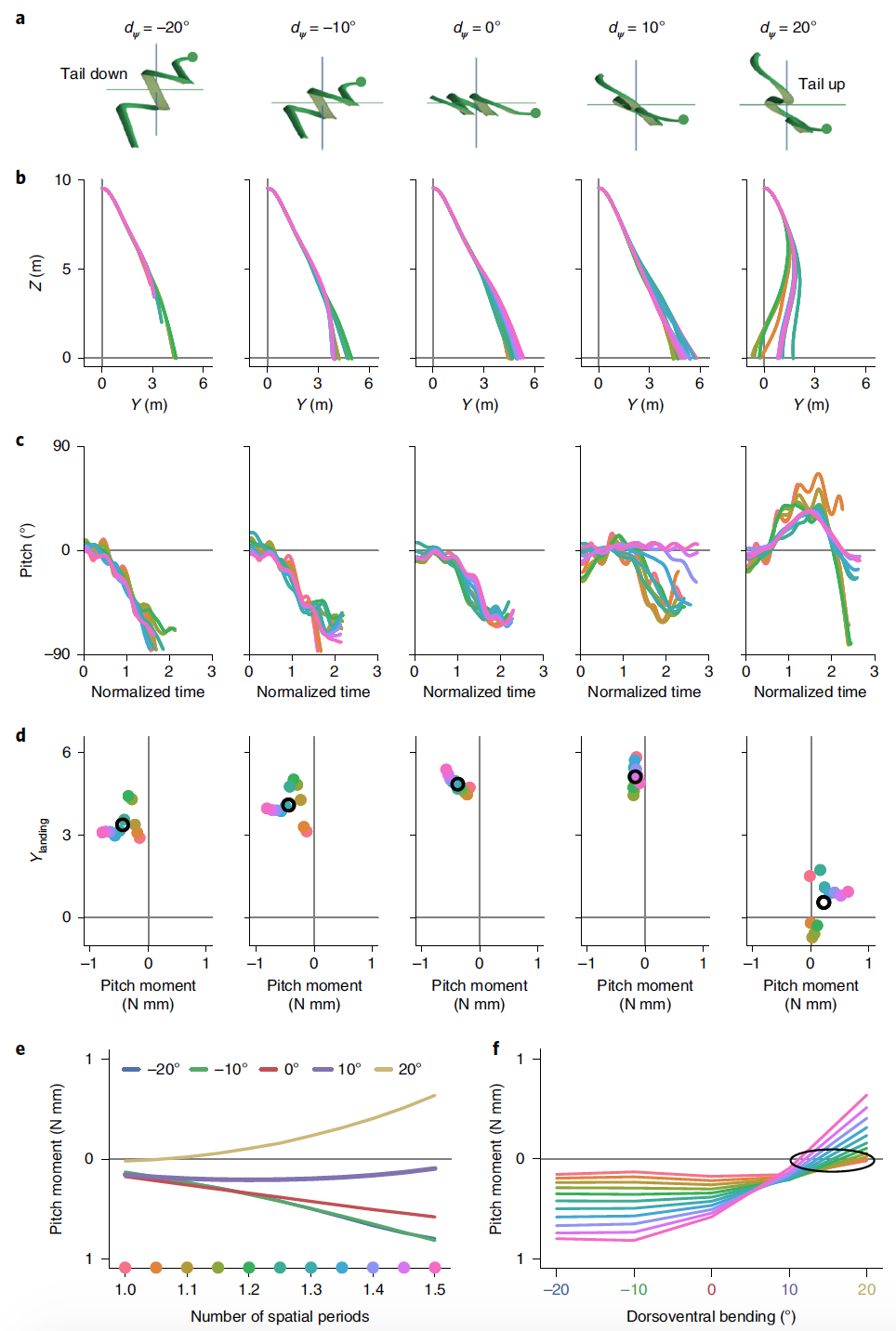
垂直波の振幅と背腹屈曲のスライディングダイナミクスへの影響を調べるために、シミュレーションでこれらのパラメーターの異なる値を使用し、結果を検討しました。
画像#5
計画はψでシミュレートしたM 10°ステップ(20°まで°、0°-20から10°と20°と背腹屈曲を図5a 11の異なる身体形状のために)。
垂直振動は計画経路に比較的小さな影響を与えますが、背腹曲げは大きな影響を与えます。
完全に平坦な蛇(ψ M= 0°)は、実験テスト中には決して観察されず、予想される最悪の結果を示しました。垂直波の振幅を大きくすると、平面の断面がねじれるため、計画効率が向上し、力を生成するためのより好ましい角度が得られます(2j)。
垂直波の振幅とは対照的に、背腹の曲がりは滑走特性、特にピッチに顕著な影響を与えました。
ψでM = -20°ヘッド以下体の背面と、グライダーは、代わりにそれが10m落下までの高さに不安定になり、浅いなかった。ψでM= 20°、体の後ろが頭の上にあり、軌道は後方に曲がっており、一部の体型はジャンプの後ろに着地しています。このような貧弱な計画は、体の上向きの傾きによって正当化されます。それにもかかわらず、上記のパラメーターを持つグライダーは、良好な回転安定性を備えていました。
背腹の曲がり、ピッチング、および計画の特性間の接続を検証するために、回転なしでシミュレーションを実行しました。方程式#4と#5の結合非線形システムを解く代わりに、科学者はうねりサイクルの間に異なる身体位相で空気力をサンプリングしました。次に、方程式#4がここに統合され、重心の位置と速度が計算されました。
本質的に、この操作は「仮想風洞」実験であり、動的モデルを使用して、加速時に身体に作用する分散力を計算します。この方法は、回転運動に対する個々の空気力学的および慣性の寄与を定量化するために、並進運動と回転運動の間の関係を削除します。
背腹屈曲が-20°から10°に増加すると、平均ピッチがゼロ(5d)に向かって増加するにつれて、シミュレートされたヘビの着座位置が増加します。 20°の背腹曲がりがあると、位相平均ピッチモーメントが正になり、計画特性が低下します。
各背腹曲げ角度について、計画効率と平均傾斜モーメントは、使用される形状、特に空間周期の数と水平波の振幅にも依存します。計画の瞬間に任意体型のために、背腹屈曲平均ピッチングモーメントに大きな効果を有し、空間周期の数の増加に伴って、瞬間はDに依存して、より正または負になって、発散しますψ。5e
での位相平均ピッチモーメントのマークは、5cで示された上向きの勾配または勾配、および5bでの結果のグライドパフォーマンスに対応します。で5F空間周期が最小のボディ形状の場合、平均ピッチングモーメントが最小になることが示されています。
上記のデータから、垂直波によりボディが平面からカールし、気流を使用して「平らな翼」(計画中のヘビのボディの形状)のローカル方向が変化すると想定できます。背腹屈曲は、体に影響を与える空気力学的運動量の大きさと符号を制御します。フライングカイトは、飛行中に背腹の曲げ角度または水平波形を変更することにより、ピッチングモーメントを制御できます。
したがって、体の背腹の曲がりは、計画の安定性、着陸の成功、および実行中に計画の軌道を変更する能力において非常に重要な役割を果たします。

画像番号6
平均化による位相の分析により、計画のダイナミクスに対する空力および慣性モーメントの相対的な寄与を定量化できます。
方程式5から、空気力と質量分布の変化の両方がボディの向きに影響することになります。速度の増加に伴い、空気力学的寄与(6a)は時間とともに増大し、慣性寄与(6b)は一定のままです。両方の時間は周期的であり、ピッチングモーメントのみが非ゼロの位相平均を示します。
最初は、慣性モーメントがピッチ軸とロール軸の近くで支配的ですが、1つの波のようなサイクルの間、それらの寄与は急速に減少します。原則として、ヨーの慣性モーメントは、ヨーの空気力学的モーメントよりも1桁大きく、他の軸の周りの慣性モーメントよりも大きくなります。ヨーの慣性モーメントは、大振幅の水平波と幅の広いS字型のボディによって発生します。この結果は、カイトが慣性回転を操縦メカニズムとして使用できることを示唆しています。
研究のニュアンスの詳細については、科学者のレポートと追加の資料を参照することをお勧めします。
空飛ぶ凧の計画を分析するために使用されるソフトウェアに慣れることを望む人は、このリンクをクリックすることができます。
エピローグ
この研究では、科学者はモーションキャプチャと3次元モデリングに最新の技術を使用しており、カイトの解剖学的に正確なモデルを作成することができました。
鳥の飛行のダイナミクスを理解することもかつて困難でしたが、飛行凧のように科学者を困惑させることはありませんでした。自然界では、翼のない飛行の例はそれほど多くはなく、それらはすべて、動物が計画を立て、石のように地面に落ちないようにする非標準的なメカニズムの使用に関連しています。
飛翔するヘビの場合、這うヘビや浮遊するヘビの動きに見られるうねりが非常に重要な役割を果たします。計画を安定させるための追加のメカニズムは、体の曲げの背腹角の修正です。これらの要素を組み合わせることで、凧揚げは木から木へと飛ぶことができ、将来の植栽の場所を正確に知ることができます。
この作品の著者は、彼らのデータが装飾された木のヘビの習慣をよりよく理解するだけでなく、ヘビのようなロボットを作成するためのさらなるインスピレーションを得ることを可能にしたと信じています。はい、そのようなロボットはすでに存在しています。彼らはクロールし、困難な表面をナビゲートし、到達困難な場所に到達できますが、飛行できますか?
そのような理由で、私たちの世界はすぐに「マトリックス」の機械の街に似たものになるでしょう。そこでは、非常に珍しい(そして少し恐ろしい)ロボットの生き物が壁に沿って這い、目的を理解することは困難でした。彼を取り巻くすべてのロボット版を作りたいという人の欲望は、だまされることはできません。これが私たちの性質です。すべてを理解し、すべてを理解し、自然が私たちの前で美しくしたことを作成できるようにします。ロボットヘビ、クモ、犬、その他のロボ動物による害よりもはるかに多くの利益がある場合、そのような研究は完全に正当化されます。
見てくれてありがとう、好奇心を持ち続け、みんな、素晴らしい週末を!
金曜日オフトップ:
, .
, .
オフトップ2.0:
, :)
, :)
一部の広告
いつもご利用いただきありがとうございます。私たちの記事は好きですか?もっと面白い資料を見たいですか?注文や友人に推薦することにより、私たちをサポートしています、$ 4.99からご開発者向けクラウドVPS、あなたのための私達によって発明されたエントリーレベルのサーバのユニークなアナログ: VPS(KVM)E5-2697 v3の(6つのコア)10ギガバイトDDR4 480ギガバイトSSDの1Gbpsについて全体の真実19ドルから、またはサーバーを正しく分割する方法は?(RAID1およびRAID10、最大24コア、最大40GB DDR4で利用可能なオプション)。
Dell R730xdは、アムステルダムのEquinix Tier IVデータセンターで2倍安いですか?オランダでは199ドルのIntel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 TVが2つだけあります!デルR420-2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB-$ 99から!インフラストラクチャビルディングの構築方法についてお読みください。サーバーを使用するクラスDell R730xd E5-2650 v4は1ペニーで9000ユーロかかりますか?