
ある日Flickrで上の写真を見て、何が悪いのかを理解しようとして頭を痛めたのを覚えています。実際のところ、カメラのモーションセンサーが「読み取り値を読み取っている」とき、つまりカメラの露出中にプロペラが回転していたため、何らかの動きが発生しました。これは本当に考える価値があります。一緒に考えましょう。
今日の多くのデジタルカメラは、アクティブセンサーとしても知られている「センシング」デバイスとしてCMOSセンサーを使用しています。これは、光が当たると電荷を蓄積することによって機能します。一定の時間-露出時間-の後、電荷はラインごとにカメラに転送され、さらに処理されます。次に、カメラは画像をスキャンし、ピクセルの行をラインごとに維持します。撮影中に動きがあると画像が乱れます。説明のために、回転するプロペラを撮影することを想像してください。下のアニメーションでは、赤い線が現在の読み取り位置に対応しており、プロペラは読み取りながら回転し続けます。赤い線の下の部分が結果の画像です。
最初のプロペラは、露光中に1/10回転します。
チャンネルを登録する:
@Ontol-世界中の写真に影響を与える最も興味深いテキスト/動画、世界の写真に影響を与える
@META LEARNING-教育と教育におけるIT /ゲームの役割に関する最も役立つ調査結果(およびこのトピックに関するアントンの考え)を共有しますマカレンコ、シーモア・ペーパー、ポール・グラハム、ジョセフ・リックライダー、アラン・ケイ)
画像は少し歪んでいますが、重要ではありません。プロペラは10倍速く移動し、露光中に完全に回転します。

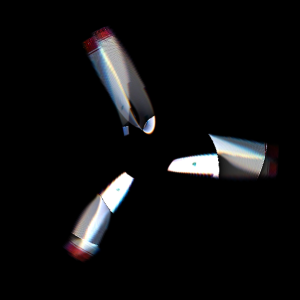
これは、最初に見た写真のように見えます。露出ごとに5回:

これはすでに少し多すぎるので、リールから外すことができます。楽しみながら、露出ごとに異なるオブジェクトが異なる回転速度でどのように見えるかを確認してみましょう。
まったく同じプロペラ:

大型プロペラブレード:
車のホイール:
ローリングシャッター効果は、実際のオブジェクトの座標を「オブジェクトスペース」から歪んだオブジェクトの「イメージスペース」に変換したものとして 認識できます。以下のアニメーションは、回転数が増加するにつれてデカルト座標系がどうなるかを示しています。低速では、変形はわずかです-数値は1に増加し、座標系の各側が画像の右側に順次移動します。これは把握するにはかなり複雑な変換ですが、理解は簡単です。
画像をI(r、θ)とすると、実際の(回転する)オブジェクトはf(r、θ)になります。(r、θ)は2D極座標です。オブジェクトの回転運動のため、このタスクには極座標を選択しました。
オブジェクトは角周波数ωで回転し、シャッターは画像に沿って垂直方向に速度vで移動します。写真の位置(r、θ)では、露光の開始以降シャッターが移動した距離はy =rsinθであり、その瞬間からの経過時間は(rsinθ)/ vです。この間、オブジェクトは(ω/ v)rsinθ)ラジアンだけ回転しました。したがって、 必要な変換
で
あるI(r、θ)= f(r、θ+(ω/ v)rsinθ)が得られます。 ω/ v比は露出ごとの回転数に比例し、変換をパラメーター化します。
明らかなプロペラの形状をより深く理解するために、Pプロペラで構成されるオブジェクトを考えることができます。ここで、fは、
θ=2π/ P、4π/ P…2π=2pπ/ Pに対してのみ非ゼロです1 <p <P。
画像Iは、θ+(ω/ v)rsinθ=2pπ/ Pに対してゼロではありません。
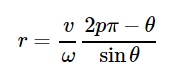
デカルト座標系では
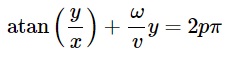
、プロペラがS形状になる理由を説明するのに役立ちます。これは、単に画像空間のアークタンジェントの関数です。涼しい。以下に、初期オフセットがわずかに異なる5つのプロペラブレードのセットを使用してこの関数をプロットしました。これは再生で確認できます。これらは、上記のアニメーションの形状と非常によく似ています。
プロセスについてもう少し学習したので、破損した写真を修正できますか?上記の画像の1つを使用して、線を引き、回転して元の画像に挿入します。下のアニメーションでは、赤い線でマークされた左側の画像をスキャンし、その線に沿ってピクセルを回転させて新しい画像を取得しています。このようにして、突然迷惑なローリングシャッターが写真を台無しにした場合でも、実際のオブジェクトのイメージを再現できます。

ええと、もし私がPhotoshopが得意だったら、Flickrで元の写真からプロペラを抽出して編集し、写真に戻しました。将来何をするかわかってると思います。
投稿の最初の写真にある実際のブレードの数と回転速度を知りたい場合は、ダニエルウォルシュによるこの素晴らしいTumblrの投稿を読んで、数学的な説明を提供しています。
彼は、「上」のブレードから「下」のブレードを差し引くことでブレードの数を数えることができると考えているため、この図では3つのブレードが得られます。また、露光中にプロペラが約2回回転することもわかっているため、いくつかの異なる速度で回転を「元に戻そう」とすると、次のような結果になります。
プロペラの中心がどこにあるのかわからなかったので、円を描きました。どうやら、中心はどこか近くにあるはずです。残念ながら、1つのブレードがありませんが、それを表示するのに十分な情報があります。
すべてが最も交差する場所を見つけたので、この回転速度(2.39回転/露光)で、これは元の画像とブレードが次のように見えることです。

残念ながら、写真は完璧ではありませんが、少なくとも現実には非常に近いものです。
著者について:Jason Coleはロンドンの大学院生で、数学、物理学、データの視覚化に情熱を傾けています。こちらが彼のウェブサイトです。そして、記事はこちらに掲載されました。
ハッカーニュースディスカッション
追加。ビデオ
チャンネルを登録する:
@Ontol-世界の写真に影響を与える、あらゆる時代と人々の最も興味深いテキスト/ビデオ
@META TRAINING、教育に関するITとゲームの役割に関する最も有用な調査結果(およびこのトピックに関するアントンの考え)を共有しますマカレンコ、シーモア・ペーパー、ポール・グラハム、ジョセフ・リックライダー、アラン・ケイ)

SkillFactoryの有料オンラインコースを受講して、スキルと給与の注目の職業をゼロから取得する方法の詳細をご覧ください。
- 機械学習コース(12週間)
- データサイエンスの専門職をゼロからトレーニングする(12か月)
- 初心者レベルの分析職(9か月)
- Python for Web Developmentコース(9か月)