
個々のシミュレータを組み合わせて分散シミュレーションシステムにできるようにするために、現在、次の標準とテクノロジが使用されています。
- IEEE1516(HLAおよびDISも置き換え)
- OPC;
- CAPE-OPENおよびその他の「業界」標準。
IEEE 1516標準はシミュレータに直接関係するため、分散シミュレーションシステム(プロトコル、推奨される制御とフィードバックの方法、システムアーキテクチャなど)の構築を目的としているため、最も興味深いのはIEEE 1516標準です。
自動化オブジェクトと技術プロセスを管理するための単一のインターフェースを提供するOPC(OLE for Process Control)ソフトウェアテクノロジのファミリも、自動化オブジェクトと技術プロセスとの統合が必要な場合にのみ、非常に重要です。 CAPE-OPEN標準は、化学業界向けに特別に設計されたシミュレーターの相互作用に使用されます。
Institute of Electrical and Electronic Engineers(IEEE)は、モデリングとシミュレーションの標準化に大きく貢献しています。分散モデリング(シミュレーション)は、ローカルまたはグローバルコンピュータネットワークを介してシミュレータ間でデータを交換するためのテクノロジです。これにより、個々のシミュレーターを1つの制御されたモデリングまたはシミュレーションシステムとして連携させることができます。分散モデリングのコンセプトは、ハイレベルアーキテクチャ(HLA)の使用に基づいています。実際には、IEEE 1516標準は、単一のAPI(アプリケーションプログラミングインターフェイス)を使用してアーキテクチャを定義しています。標準の最初の仮定は次のとおりです。
- 単純な「モノリシック」シミュレーションモデルは、プロのユーザーのニーズを満たすことができません。
- シミュレーションのすべての可能なアプリケーションは事前に不明です。
- 個々のシミュレーターを複雑なシミュレーションシステムに任意に組み合わせる可能性を提供する必要があります。
- 分散モデリングアーキテクチャは、将来のモデリングおよびシミュレーションテクノロジーに対して可能な限りオープンである必要があります。
現在、IEEE 1516は、米国国防総省およびNATOによって開発および使用されているシミュレーターとの互換性に対する厳しい要件により、軍事用途におけるシミュレーターおよびシミュレーターの相互作用の絶対的な標準です。現在、IEEE 1516は、民間分野、航空、宇宙飛行、輸送などの複雑な技術システムの要員を訓練するためのシミュレーターの開発でますます使用されています。
ソフトウェアテクノロジのOPCファミリは、産業オートメーションアプリケーションの作成と保守のコストを削減するように設計されています。 90年代初頭、産業用ソフトウェア開発者は、さまざまな製造元のデバイスやさまざまな通信プロトコルとデータを交換するための汎用ツールが必要でした。 OPCは、産業用ソフトウェア開発者に、任意のデバイスとのデータ交換のための汎用固定インターフェースを提供します。同時に、デバイス開発者はこのインターフェースを実装するプログラムを提供します。
複雑なシミュレーションシステムを作成するには、IEEE 1516とOPCの使用を組み合わせて、実際の機器とSCADAシステム(図)を使用できるようにします。これは、多くのタスクで非常に役立ちます。
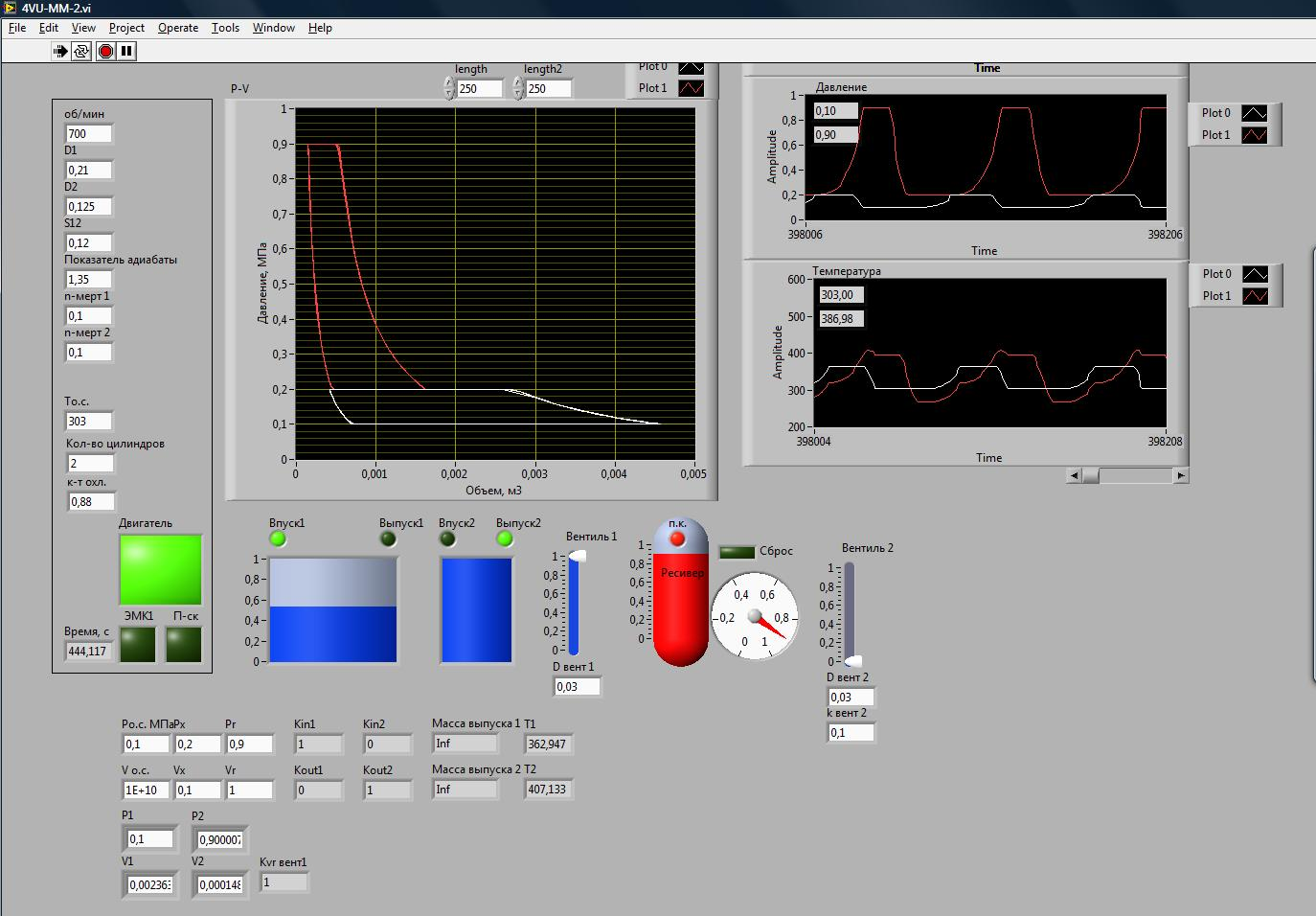
IEEE 1516標準(シミュレータの基本)とOPC(SCADAシステムで使用)の間の通信は、シミュレータで直接または中間を介して実装できます。たとえば、私にとって、このような仲介者の役割は、National Instruments LabViewパッケージによって実行されます。 LabViewは、あらゆる複雑な数学モデルをサポートし、OPCサポートを組み込み、OPCサーバーとして機能し、さまざまなI / Oカードとの相互作用を効果的にサポートします。これにより、必要な機器を直接使用できますが、IEEE 1516との相互作用の手段がありません。 、適切なソフトウェアコンポーネントを記述する必要があります。
IEEE 1516とOPCを使用した結果、多くのシミュレーター、実機、SCADAシステムなどを含む比較的複雑な分散シミュレーションシステムを作成することができます
。IEEE1516規格のサポートに関するシミュレーターまたはシミュレーターの認証の問題は、別の考慮に値します。IEEE 1516の用語で連合)との相互作用を実装するソフトウェアライブラリ。ただし、この認定の目的は、プログラムの機能上の欠陥を特定することではありません(IEEE 1516標準のサポートの認定のみ)。
認証が可能な組織:
- 米国。国防総省(DoD)モデリングおよびシミュレーション調整オフィス(M&S CO)。ウェブサイト:www.msco.mil
- . ONERA. (Office National d’Etudes et Recherches Aérospatiales) is the French national aerospace research center. : www.onera.fr
- . Pitch Technologies AB. : www.pitch.se


IEEE 1516標準に基づいて分散シミュレーションシステムを構築する際の問題について考えてみましょう。情報サポートで使用される基本的な用語は、IEEE 1516分散インタラクティブシミュレーションシステムの用語に対応しています。これらは、フェデレーション、フェデレーション、オブジェクト、属性、および相互作用です。オブジェクトの概念は、現実の世界での別個の現象のモデルとして定義されます。オブジェクトにはメソッドはなく、状態のみがあります(オブジェクトを処理する関数のないデータ構造のみ)。オブジェクトの状態は、一定の属性セット(時間とともに変化する可能性のある正確な値)によって特徴付けられます。各オブジェクトはいつでもその状態によって特徴付けられます。その状態は、その属性の現在の値のセットによって決定されます。フェデレートは、オブジェクトの動作の数学的な説明です-シミュレーションモデル、ソフトウェア定義(ディレクティブ言語で実装)またはハードウェアセンサー値で表されます。実際、連邦捜査官は模倣者と実際の機器または特別なソフトウェアの両方になる可能性がある。唯一の要件は、通信に統一されたインターフェースを提供することです。フェデレートは、属性の値を変更(更新)または取得(表示)することにより、オブジェクトを操作できます。特に、なりすましのユーザーも連合です。シミュレーションに参加しているすべての連合の集合体が連合を形成します。唯一の要件は、通信に統一されたインターフェースを提供することです。フェデレートは、属性の値を変更(更新)または取得(表示)することにより、オブジェクトを操作できます。特に、なりすましのユーザーも連合です。シミュレーションに参加しているすべての連合の集合体が連合を形成します。唯一の要件は、通信に統一されたインターフェースを提供することです。フェデレートは、属性の値を変更(更新)または取得(表示)することにより、オブジェクトを操作できます。特に、なりすましのユーザーも連合です。シミュレーションに参加しているすべての連合の集合体が連合を形成します。
「相互作用」という用語は、特定のオブジェクトインスタンスまたはフェデレーションに関連付けられておらず、フェデレーションレベルで発生するインスタントメッセージ(イベント)として定義されます(つまり、送信者を特定することはできません)。オブジェクトの状態とは対照的に、相互作用はシステム内で常に維持されるのではなく、瞬間的な性質のものです。例としては、関係するすべてのフェデレーションメンバーへのテキストメッセージの一方向のブロードキャストがあります。階層型フェデレーションスキーム(HLA / IEEE 1516)を図に示します
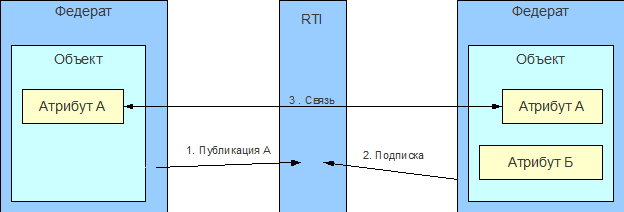
連合の相互作用は、サブスクリプションとして実装された一般的な相互作用メカニズム(RTI)を使用して実行されます。特定の属性と別のフェデレーションの相互作用を取得することに関心のあるフェデレーションは、RTIを通じてそれらにサブスクライブする必要があります。属性値のリクエスト、提供、変更のメカニズムを図に示します。分散シミュレーションとコラボレーションを編成するメカニズムを図に示します。

画像。階層的なフェデレーションスキーム
シミュレータ内のオブジェクトは、原則として、それぞれ3Dモデル、音源であり、そのようなオブジェクトの属性は、空間内の位置と方向、サイズ、ボリュームなどです。シミュレーターに関しては、ユーザーのアクション(フェデレーション)、たとえばキーの組み込みは、相互作用と見なすことができます。
. (RTI)

. (RTI)
.
RTIを介して相互作用する分散シミュレーションシステムを作成する場合、次の重要な機能を考慮する必要があります。フェデレーションのすべての要素とフェデレーションは特定のファイル(FOM(フェデレーションオブジェクトモデル)ファイルはフェデレーションの記述に使用されます)で文書化する必要があります。フェデレーションはSOMファイル(シミュレーションオブジェクトモデル)で記述されます。すべてのデータはフェデレーションにのみ保存され、RTIはデータを保存せず、転送のみを行います。 HLAでは、1つのフェデレーションのみがいつでも属性の値を変更できます(権利を譲渡するための特別な権利管理メカニズムがあります)。フェデレートは現地時間を管理でき、HLAはさまざまな内部時間管理メカニズム(同期)を使用します。
一般に、IEEE 1516標準は、フェデレーションの状態の維持、状態の更新、さまざまな時間同期メカニズム、フェデレートの相互作用の領域など、分散シミュレーションシステムの作成に関連する多数の問題に対処しています。標準自体の重要な量、さらには標準で説明されているすべての側面を実証するためのプログラムコードの量に関連して、「基本」機能の基本的な実装のみを以下に示します(図)。

画像。 IEEE 1516基本機能の実装ブロック図
実装のより詳細な提示は、プログラムのかなり大きなリストを提示する必要性に関連しています。このため、読者は、RTIをサポートするソフトウェアに付属するプログラムの例を独立して使用できます。多くのコメント付きの簡単な例は、Portico Projectライブラリに含まれており、porticoproject.orgから無料で入手できます。標準のほとんどすべての商用実装にも多くの例が含まれています。
例として、ラジコンカーとコントロールパネルの2つの連合で構成される次の連合を考えます。車の4つのエンジンそれぞれの速度を設定し、前輪を回して制御を行うとします。機械には、障害物までの距離を測定し、コントロールパネルに信号を送信するセンサーが装備されています。これには、コントロールパネル用のcYpravlenieと距離センサー用のcDatchikの2つのオブジェクトクラスを定義する必要があります。 cYpravlenieクラスの属性は、wheel1、wheel2、wheel3、wheel4、wheel_angleです。 cDatchikクラス属性は距離です。以下は、HLA 1.3形式の連携記述ファイルです(相互作用は例として示されています)。
;; — (FED ) HLA 1.3
(Fed
(Federation Test)
(FedVersion v1.3)
(Federate "fed" "Public")
(Spaces
(Space "Geo"
(Dimension X)
(Dimension Y)
)
)
(Objects
(Class cYpravlenie
(Attribute wheel1 reliable timestamp)
(Attribute wheel2 reliable timestamp)
(Attribute wheel3 reliable timestamp)
(Attribute wheel4 reliable timestamp)
(Attribute wheel_angle reliable timestamp)
)
(Class cDatchik
(Attribute distance reliable timestamp)
)
)
(Interactions
(Class reaction BEST_EFFORT RECEIVE
(Sec_Level "Public")
(Parameter dx)
(Parameter dy)
(Parameter dz)
)
)
)
次に、コントロールを表すシミュレーターが、cYpravlenieクラスに基づいて連携とオブジェクトを作成します。車を表すシミュレーターは、cDatchikクラスに基づいて連合とオブジェクトも作成します。連邦はまた、彼らが関心を持っている変更、すなわちフェデレーションマシンは、cYpravlenieクラス(つまり、cYpravlenieクラス)からオブジェクトデータを受信し、フェデレーションコントロールをcDatchikクラスにサブスクライブします。したがって、機械はコントロールパネルから変更を受け取り、コントロールパネルは車内のセンサーからデータを受け取ります。
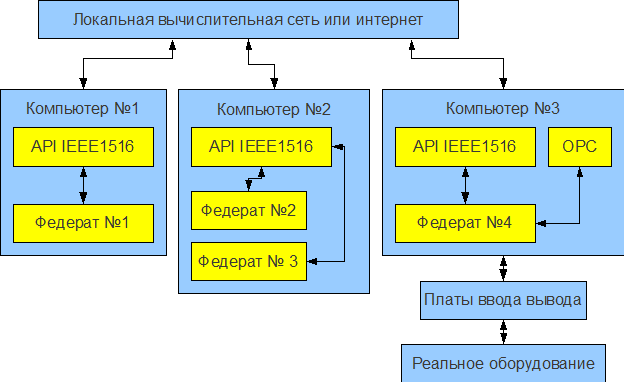
より高度なシミュレーションシステムを構築するには、真剣な設計が必要です。まず、最初の近似でフェデレーションの主要な構成、つまりフェデレート、フェデレーションオブジェクト、およびオブジェクト属性を決定する必要があります。連携スキームを作成する場合、分散シミュレーションシステムのハードウェアコンポーネントを考慮する必要があります。つまり、センサーと制御ハードウェアデバイスも連携、オブジェクト、および属性の形式で表現する必要があります。写真の上。吸盤ロッドポンプ設置シミュレータの連合の構造を示します。

画像。フェデレーション構造
連携が構成された後、リンクを定義する必要があります。つまり、どの連携がオブジェクトの属性を公開(つまり、変更)し、どの連携がこれらの属性の変更をサブスクライブするかの反映です。原則として、リンクを定義する段階で、フェデレーションの構造に対して多数の「修正」が確立されます。構造と関係の「改良」を必要な回数繰り返した後、設計者は連携の「モデルの正確さ」の事実を確立する必要があります。リンクを定義する例を図に示します(リンクのないオブジェクトは非表示になります)。

画像。リンクを定義する最初の段階の例
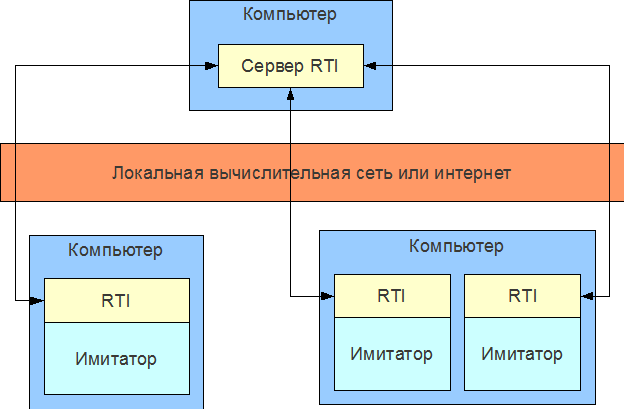
次の段階では、必要なコンピューター数と、対応する連合の分布を決定します。たとえば、連合「A」はコンピューター「1」で機能し、連合「B、C、D」はコンピューター「2」で機能します。
画像。コンピューターによる連合
の分布原則として、連合の分布はそれらの数学モデルの効率に基づいています。連合の数学モデルが重要な計算リソースを必要としない場合は、1台のコンピューターを使用できます。連合の数学モデルが大量の計算リソースを必要とする場合、コンピューターの数と対応する連合の分布を決定する必要があります。
次のステップは、連携の承認された「正しいモデル」を反映する連携記述ファイル(上記の例を参照)を作成することです。次に、RTIと対話するための適切なコードと、連携の数学モデルを実装するためのコードを記述することにより、連携のソフトウェア実装を作成します。最終段階では、分散シミュレーションシステムをテストし、エラー、システム内の特定のコンポーネントの「過負荷」(統計に基づく)、正しい同期などを特定する必要があります。
各フェデレーションの統計とフェデレーション全体の統計は、実行されたクエリの数とタイプを示しますシステムの運用中に起こり得る問題を特定することができます。
連携の統計の例:
RTIA: Statistics (processed messages)
Joined federation as car_federate
Synchronization point announced: ReadyToRun
Achieved sync point: ReadyToRun, waiting for federation...
Federation Synchronized: ReadyToRun
Time Policy Enabled
Published and Subscribed
Add instance object: obj_datchik
Removing temporary file _RTIA_3033_ExampleFederation.fed on resign federation.
Resigned from Federation
Didn't destroy federation, federates still joined
List of federate initiated services
--------------------------------------------------
1 Message::CLOSE_CONNEXION (MSG#1)
1 Message::DESTROY_FEDERATION_EXECUTION (MSG#3)
1 Message::JOIN_FEDERATION_EXECUTION (MSG#4)
1 Message::RESIGN_FEDERATION_EXECUTION (MSG#5)
1 Message::SYNCHRONIZATION_POINT_ACHIEVED (MSG#10)
1 Message::PUBLISH_OBJECT_CLASS (MSG#28)
1 Message::SUBSCRIBE_OBJECT_CLASS_ATTRIBUTES (MSG#32)
1 Message::SUBSCRIBE_INTERACTION_CLASS (MSG#34)
1 Message::REGISTER_OBJECT_INSTANCE (MSG#40)
1708 Message::UPDATE_ATTRIBUTE_VALUES (MSG#41)
855 Message::TIME_ADVANCE_REQUEST (MSG#91)
3 Message::GET_OBJECT_CLASS_HANDLE (MSG#112)
6 Message::GET_ATTRIBUTE_HANDLE (MSG#114)
1 Message::GET_INTERACTION_CLASS_HANDLE (MSG#116)
120516 Message::TICK_REQUEST (MSG#141)
2564 Message::TICK_REQUEST_NEXT (MSG#142)
List of RTI initiated services
--------------------------------------------------
1 NetworkMessage::ANNOUNCE_SYNCHRONIZATION_POINT (MSG#13)
1 NetworkMessage::FEDERATION_SYNCHRONIZED (MSG#15)
1 NetworkMessage::DISCOVER_OBJECT (MSG#43)
1711 NetworkMessage::REFLECT_ATTRIBUTE_VALUES (MSG#45)
49 NetworkMessage::GET_FED_FILE (MSG#84)
Number of Federate messages : 125662
Number of RTIG messages : 1763
RTIA: Federate destroyed
TCP Socket 3 : total = 122015 Bytes sent
TCP Socket 3 : total = 340249 Bytes received
UDP Socket 4 : total = 0 Bytes sent
UDP Socket 4 : total = 0 Bytes received
:
CERTI RTIG up and running ...
New federation: ExampleFederation
Looking for FOM file...
Trying... open_test.fed --> cannot access.
Now trying.../usr/local/share/federations/open_test.fed... opened.
TCP Socket 7 : total = 340400 Bytes sent
TCP Socket 7 : total = 122015 Bytes received
UDP Socket 4 : total = 0 Bytes sent
UDP Socket 4 : total = 0 Bytes received
TCP Socket 6 : total = 258616 Bytes sent
TCP Socket 6 : total = 283044 Bytes received
UDP Socket 4 : total = 0 Bytes sent
UDP Socket 4 : total = 0 Bytes received 時間同期
分散シミュレーションシステムの設計と実装の実践が示しているように、最も難しい問題は、時間の流れの制御(時間同期)に関連しています。
通常、フェデレーション時間の同期方法を設定すると、TimeRegulatingとTimeConstrainedの2つのパラメーターが設定されます。実際には、これらのモードは他の連合からメッセージを受信するプロセスに影響し、メッセージの順序付けメカニズムに直接関連しています。
- 受信順に(メッセージは、時間制御なしで受信された順に送信されます);
- 優先度(受信メッセージは優先度キューにあり、そのタイムスタンプはメッセージの優先度を決定するために使用されます);
- 因果関係(メッセージがそれらのメッセージによって表される先行および後続のイベントと一致する順序で連合に送信されることを保証します);
- タイムスタンプ(このサービスを使用する場合、メッセージはタイムスタンプの順にフェデレートに送信されます)。
異なる連合が異なる同期方法を使用できることにも注意する価値があります。
RTI実装用のソフトウェアライブラリ
使用可能なHLA \ IEE1516実装のリストは、en.wikipedia.org /wiki/Run-Time_Infrastructureにあります。今日、商用および非商用の両方で、かなり多数の実装が利用可能です。ほとんどの実装はJAVAおよびC ++(これらは標準で使用されている言語です)で作成されていますが、MatLab、Python(CERTIプロジェクト)などの実装もあります。
ライブラリを選択するときは、IEEE 1516をサポートするための「認証」に特に注意する必要があります。原則として、すべての商用実装には「証明書」がありますが、無料のものにはありません(多くの無料実装はそのような証明書を準備しています)。
商業売上表:
- CAE RTI CAE Inc.
- en.wikipedia.org/wiki/CAE_Inc。
- Chronos RTI Magnetar Games
- www.magnetargames.com/Products/Chronos
- MÄKハイパフォーマンスRTIMÄKテクノロジー
- www.mak.com/products/rti.php
- HLA Direct General Dynamics C4システム
- en.wikipedia.org/wiki/General_Dynamics_C4_Systems
- openskies RTI Cybernet Systems
- www.openskies.net
- Pitch pRTI Pitch Technologies
- www.pitch.se/products/pitch-prti/pitch-prti-overview.html
- RTI NG Pro Raytheon Virtual Technology Corporation
- www.raytheonvtc.com/products.jsp
非営利販売表:
- CERTI ONERA
- savannah.nongnu.org/projects/certi
- en.wikipedia.org/wiki/ONERA
- ポルティコプロジェクトlittlebluefrogラボ
- porticoproject.org
- GERTICO(CorbaベースのドイツRTI)Fraunhofer IITB
- www.iitb.fraunhofer.de/servlet/is/2920
- ランデブーRTI国立科学技術大学(NUST)、パキスタン
- www.mcs.edu.pk/PDC-RG.html
- Open HLA(ohla)
- sourceforge.net/projects/ohla
私はONERAプロジェクトCERTI(https://savannah.nongnu.org/projects/certi)を使用して、分散アプリケーションのインフラストラクチャをサポートしています。
RTIを介した連合軍の相互作用の速度の測定
このようなテストは、分散シミュレーションシステムの設計において非常に重要です。特に、異なるフェデレーションが異なるコンピューターネットワークに配置されている場合はさらに重要であり、インターネットを介してフェデレートを相互作用させる場合はさらに重要です。
最小の遅延時間を実現するには、パケット通過時間の遅延が最も小さいサーバーを選択する必要があります(pingコマンドを使用して確認できます)。例として、TyumGNGUのNII EORで作成された分散システムの1つの作業を考えてみましょう。 100メガビットのネットワークが使用され(pingの遅延は0.231ミリ秒未満)、時間同期はありません(RTI内の遅延を減らすため)、2台のコンピューター、サーバー(rtig)がいずれかのマシンで実行されています。フェデレーションパラメーター-2つのオブジェクトには5つの属性(フェデレーション/コンピューターごとに1つのオブジェクト)が含まれ、フェデレート間の相互作用は双方向です。測定値を処理した結果、1秒あたりの相互作用数の送信データのサイズへの依存性が得られました。
このような測定の結果により、たとえば、シミュレータが特定の「リアルタイム」で動作する必要がある場合、つまり、たとえば、少なくとも毎秒60回更新し、1つの対話(ファストイーサネットの場合)で300キロバイト以下を送信する必要があります(たとえば、5つの属性の場合、それぞれ60キロバイト)。同時に、毎秒60回送信される300キロバイトのデータは、RTIを使用してシミュレータ間で音声およびビデオデータを転送したり、VRデバイスとやり取りしたりする可能性も示しています。
インターネットを介してフェデレーションを行う場合、最小遅延は、主にパケットの送信遅延によって決まります。たとえば、サーバーとシミュレータの間のパケットのレイテンシが300ミリ秒の場合、1秒あたりのインタラクションの最大数は3を超えません
。IpoIB(IP over InfiniBand、RFC 4392)、10Gイーサネット、Myrinet-10Gなどのより高速なソリューションの使用。 。スループットを向上させ、レイテンシを大幅に削減できます(既存のソリューションでは、1秒あたり3000万以上のインタラクションを生成できます)。
実際のシステムとの相互作用
オブジェクトの数学モデル、つまり人工システムだけでなく、実際のシステムやデバイスも連合として機能できます。例は次のとおりです。
- 音声データを提供するマイク;
- ビデオデータを提供するビデオカメラ;
- ジョイスティック(画像)、プリンターなどのさまざまな入出力デバイス
- ADC / DACボードを介してコンピューターに接続されたさまざまなセンサーと制御メカニズム。
- 産業用OPCインターフェースを介した実機およびSCADAシステム(図2.10.1、第1.4.1章)。
- 別のコンピューターまたは仮想マシンで実行されている実際のオペレーティングシステムの「デスクトップ」へのインターフェース(図)。
- VRデバイス(4.5.9章)。
- データベースインターフェースなど
このような可能性は、一般的にシミュレーターやシミュレーションシステムにとって大きな関心事です。