
偶然にも、私の活動は危険な産業の要員のための訓練施設の創設に関連しています。模倣者は多方向の科学的ベクトル-コンピューターグラフィックス、工学心理学(人の生理学的および心理学的特性、一般化された独立した特性、性格と職業のサイコグラムの研究)、人間工学、認知科学、コンピューターサイエンスなどのコンテキストで発達するので、
私はよく質問を聞きます、「クラシック」グレード(1-5)または(0-100)ではなく、全体セット(knowledge-skills-skills)で作業することを好む理由と、スタッフの労働条件へのスキルの伝達の度合いも使用します。
どうして?答えは2つあります。1つは単純、もう1つは詳細です。
プレーン:
2人が訓練を受けている状況を想像してみてください。たとえば、複雑な機器全体の操作を担当するオペレーターや、清掃担当者などです。
訓練の結果によると、オペレーターは「4+」、クリーナーは「4」になります。オペレーターはよりよく訓練されたと結論付けることができます。 「教育学的尺度」1-5の観点でのみ語るなら、そうです。
なぜそれが悪いのですか?
どちらもどこか間違っていることがわかりましたか?さらに、オペレーターは0.5と間違えられ、掃除婦は1と間違えられました。次に、「この装置の背後にあるエラーと実際の生産における0.5のエラーは何につながるのですか?」掃除婦は「気をつけて、床が濡れています」という標識を付けるのを忘れます。ある確率で誰かが滑り、ある程度の確率で怪我をします...としましょう。
そして、オペレーターについてはどうでしょう。ある場合、彼は(例えば)緊急時に正しいアクションを実行することができなくなり、ある確率で、例えばオブジェクト全体が離陸するでしょう。ユニットの彼の「失われた」半分は何を隠すのですか?
オペレーターの4+は、クリーニングレディの4または3よりも「見た目」が悪いことがわかります。
このため、シミュレータを作成して操作する際には、古典的な評価尺度を使用しないようにしています。
私はすでにリスク管理について書いています。今度は、必要なレベルの要員特性の評価と制御について説明します...
つまり、0..5でも、0..100でも、単一の評価では、要員の準備状況を適切に反映できません。作業。そして、私は、残留リスクを通じて(金額で、死者数などで)「意欲」を表現する方法を示します。
なぜなら 「研修生が4を獲得した」の代わりに、「現在の人員の訓練は、年間240000ルーブルの推定損失のレベルであり、これは「許容可能なリスク」のレベルにあります。担当者が作業を許可することができる「。
基本仮定:
「各人的エラーの確率は、シミュレーター(シミュレーター)のエラーの確率に等しく、実際のシステムと完全に同じです(システムは実際のシステムを確実に再現します)」

1.作業手順
アルゴリズムは、特定の問題セットを解決するための操作のシーケンスを決定する有限のルールセットであり、有限性、確実性、入力、出力、効率という5つの重要な機能があります。(D. E. Knut)マスタリングされた職業については、トレーニングの目標を区別することができます。たとえば、担当者は、マスターされている職業に特有の設備の調整、調整を実行できる必要があります。
アルゴリズムは、さまざまな入力データから目的の結果に至るまでの計算プロセスを定義する正確な処方です。(A.マルコフ)
目標を達成することは、多数のタスク(ステージ)の成功したソリューションを前提としています。したがって、アルゴリズムを線形にすることも、より複雑な構造(図)にすることもできますが、作業(規則)を実行するためのアルゴリズムは、順序付けされたタスクのセットとして表すことができます。

画像。線形および非線形アルゴリズム(担当者がアクションを実行するためのスキーム
)直接実行する作業のZUN(knowledge-skills-skills)の評価、形成、および修正は、アルゴリズムに含まれる各タスク(要素)のZUNの形成を意味します。
次に、各タスクを定義する必要があります。
- input-変数の初期データを設定します。
- 操作のシーケンスを定義するルールの有限セット。
- 使用済みの機器、工具、デバイス。
- 望ましい結果(指定された出力);
- 有効性を評価するための方法論。
次に、ポイント5の
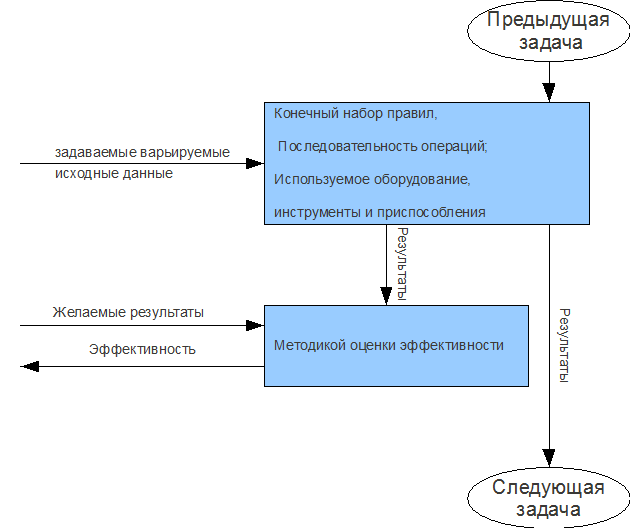
図を「明らかに」しようとします。アルゴリズムの構成要素のスキーム-
ナレッジタスク:
- デバイス、目的、動作原理。
- 主なパラメーターとパフォーマンス
- パラメータ値(メイクアップトルク、始動電流など)
- 安全規制
- 便利で安全なメンテナンスのためのプラットフォーム、階段の配置...
- オブジェクト、通路、サービスの場所の照明。
- 設置と試運転、配線図など
- マーキング
- ツールおよび測定装置の使用に関する規則
- (, )
- , , .
- .
- .
- ( )
- .
- (, )
- ( , ).
- , .
- チャート、ジャーナル、レポートの標準フォームへの記入
- 等
スキル:
- 実際に(知識を使用して)タスクを(所定の時間に必要な精度で)実行します。
スキル:
- タスクを実際に完了します(所定の時間に必要な精度で-シフト全体で)。
たとえば、作業を実行するためのZUNアルゴリズムの形成-遠心ポンプのテスト(GOST 6134-2007。動的ポンプ。テスト方法)は、次のタスクに分類できます。
- ポンプ(ユニット)で実行
- 圧力とエネルギー特性の除去
- 回転周波数;
- ポンプフィード;
- ポンプの入口と出口の圧力、または指定された圧力の差
- 汲み上げられた液体の温度。
- ポンプの電力消費とその効率の流れへの依存性
- キャビテーション特性の除去
- 自吸式ポンプ試験
- テスト結果の処理
これらのタスクを実装するには、研修生の間で次の知識を形成する必要があり
ます。1.用語、定義:
- 宛先インジケーター(フロー、ヘッド、スピード);
- 効率および設計指標(サクションヘッドΔh(NPSH)、成績係数(COP)、ポンプ出力、自吸式高さ、外部漏れ、重量)
- 人間工学的指標(振動、騒音)
- 信頼性指標(平均故障時間、リソース)
- 特性(圧力、エネルギー、キャビテーション、振動、騒音、自吸)
2.テスト条件と原則:
- 指標と特性を決定するための条件
- 試験条件
- 純冷水以外の液体での試験
- 典型的なカタログ曲線のある量産ポンプの許容差
- テスト設備(スタンド)スキーム
- エラーの決定
- 体積測定方法
- ポンプヘッドの測定原理
3.テスト、プレゼンテーション、結果のプレゼンテーションのシーケンス。
4.安全指標の決定:
- 電気安全
- 熱安全
- 機械的安全
- その他の有害な生産要素(指標)
スキルと能力の形成には、必要なすべてのタスクの実装を含む実践が必要です。つまり、学生はこれらのアクションを実行した経験を持っている必要があります。原則として、各タスクは基本操作の有限セットに分割されます-サブタスク(吸引バルブを開き、排出バルブを閉じ、圧力ゲージのバルブを閉じ、チェック...)。ポンプをオンにするには、「開始」ボタンを押し、振動とノイズをチェックします。 ..など)
この場合、知識の形成には、テキスト素材、ビデオフィルム、3D合成アニメーション、および模倣者の両方を使用できます。スキル、特にスキルの形成には、模倣者または実際の装備を使用する必要があります。併用することも可能です(図)。
ZUNを評価するには、トレーニングの有効性を評価する方法を使用する必要があります
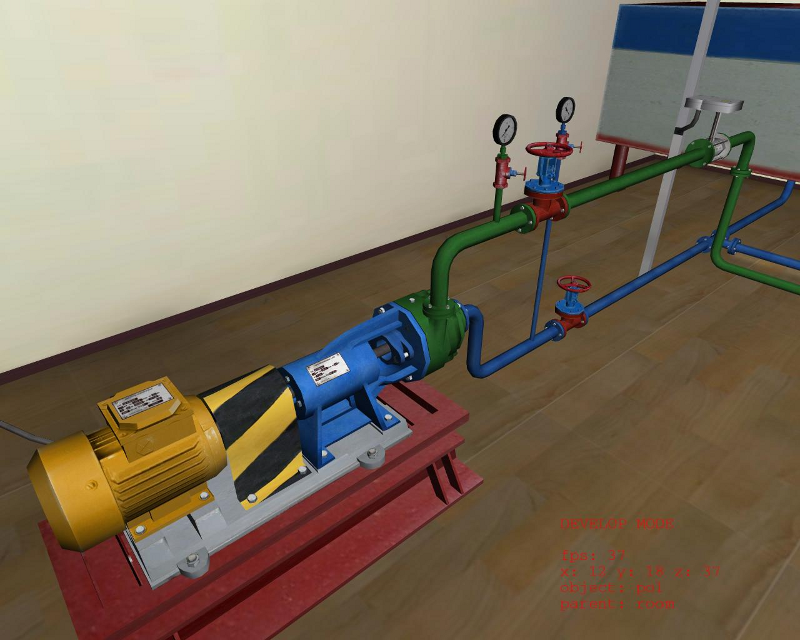
図 「遠心ポンプのテスト」シミュレーターの画面

図。実際の設置の写真
知識、能力、スキルの形成と伝達を評価するための方法(メカニズム)
トレーニングの結果として形成された知識、スキル、能力の評価
必要な特性のレベルの評価と制御-知識は、学生が覚えている量に基づいて評価できます(これは、たとえばテストを使用して簡単に測定できます)。
A.M. Novikovの作品 「運動プロセスの定量的パターンの分析。
体系的な推奨事項「次のデータが提供されます:」実際のシステムを教える場合、次の特性が学習レベルの基準として機能します。
- ( , , , , , ..);
- ( , , . . , );
- ( (, ..), , , , ..);
- ( , , . .).

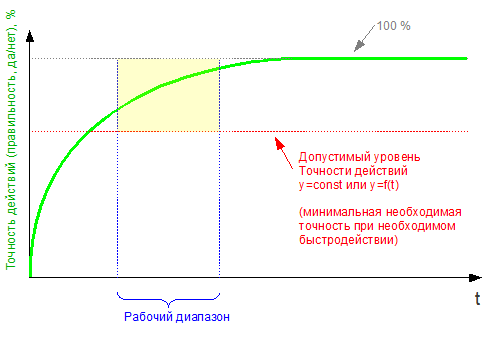
画像。人的知識の評価(測定)(y = const)

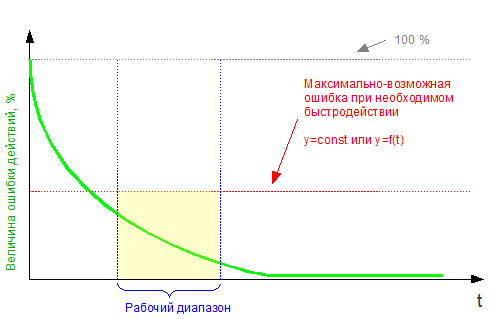
図。人的知識の評価(測定)(y = f(t))
動作範囲内の関数(リコールされた情報の割合)が許容レベルを超えている場合、この理由による人的エラーの確率は0であると想定できます。それ以外の場合、つまり、つまり、機能の一部または機能が動作範囲内で完全に許容レベルを下回っている場合、「知識」による人的エラーの確率は、動作範囲内の許容レベルの上下の機能領域の比率として計算できます。

許容レベルの上下にある機能領域(これらの領域の差または比率は、実際には「知識」による人的エラーの確率を設定します)

上記のように、「各人的エラーの確率はシミュレーターでのエラーの確率に等しく、これは実際のシステムと完全に同じです(システムは実際のシステムを確実に再現します)」、つまり(P = Pf)と仮定します。特性のレベル(ミスマッチ、エラー値)と人的エラーの確率(P = Pf)の間のこのような関係を受け入れると、P = 1-はエラーの100%の確率を意味し、P = 0-はエラーの可能性がない(0%)を意味し、P = 0.5は、人為的エラーの50%の確率に対応します。それ以外の場合(シミュレーターと実際のシステムの違いにより、知識、スキル、能力が実際のオブジェクトに完全に転送されない場合)、依存関係は式P = f(Pf)で与えられます。

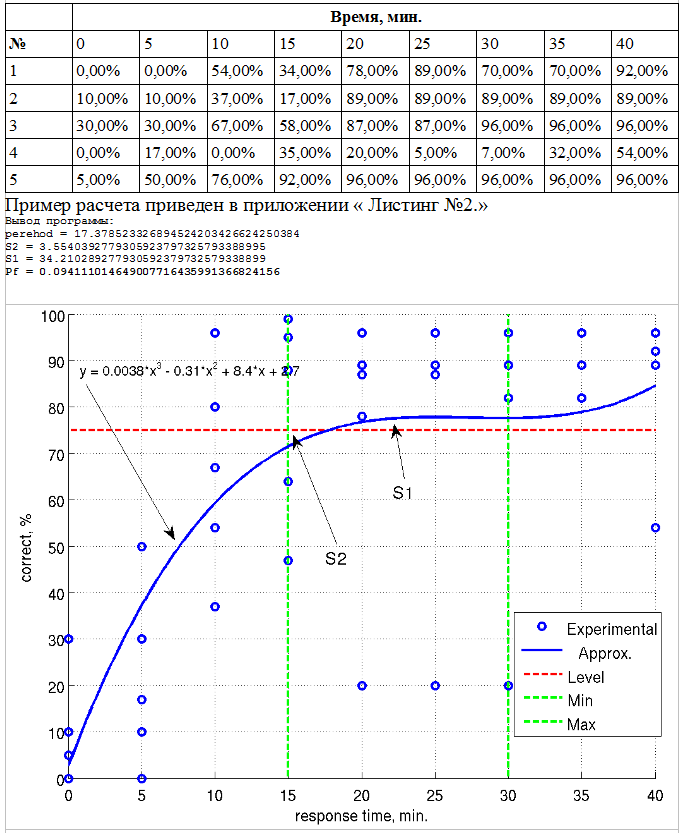
必要なパフォーマンスレベルの評価と制御-スキルは、利用可能な時間に応じて、担当者がアクションをどのくらい正確に(正しく)実行するかに基づいて評価できます。この検証は、訓練を受けた/検査を受けた担当者にさまざまなイベントを提示し、アクションを実行したりイベントに反応するのに必要な時間を測定したりすることにより、シミュレータを使用して実行できます。別のアプローチも可能です-さまざまな状況を提示し、アクション/リアクションの許容時間を制限します。スキル測定の結果は、「ナレッジ」グラフと同様のグラフになります。
画像。スキルと能力の特性を、費やした時間から実行されたアクションの正しさ(上)またはエラー(「不一致」)の関数としてグラフィック表示
人的スキルと「スキル」による人的エラーの確率の関係は、動作範囲内の許容レベルの上下にある機能の領域を使用して決定できます(これらの領域の差または比率は、「スキル」による人的エラーの確率を実際に設定します。図を参照してください)。
たとえば、5個のポンプユニット(USHGN)のバランスを取る場合、費やされた時間に応じて、担当者がアクション(バランス品質)をどのくらい正確(正しく)実行するかを測定できます。この場合、Y軸に沿って、現在の「バランス」レベルと許容基準との%コンプライアンスの値がプロットされます。
必要なパフォーマンスレベルの評価と監視-スキルは、さまざまな設定で必要なスキルレベルを長期間維持する能力をさらに考慮して、スキル評価と同様のアプローチを使用して評価できます。
スキルのレベルを評価するためのアルゴリズムは、次のように実行されます。従業員のシフトの時間間隔は、たとえば10のようにいくつかの間隔に分割されます。シミュレーターを使用して、費やした時間に応じて人事アクションの精度が測定され、各間隔について計算されます(人事ミスの確率)。得られたデータは、マグニチュードのグラフの形で表示されます-パフォーマンスのレベルを長期にわたって維持する能力。
スキルを評価するときは、中程度の負荷(通常の状態)、低負荷(リラックスした状態)の下で(たとえば、勤務シフト中、疲労の増加、注意力の低下など)パフォーマンスレベルを長期にわたって維持するための訓練を受けた、または認定された担当者の能力も考慮する必要があります。そして高負荷。労働活動の過程で、職員は3つの主要な状態を経て、お互いを入れ替えます。トレーニングのフェーズ、または効率の向上。パフォーマンスの高い安定性のフェーズ。パフォーマンス低下の段階(疲労)。
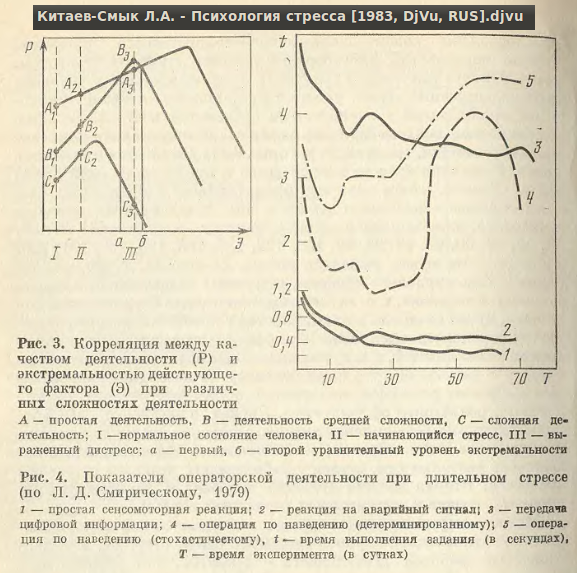
個人の作業の効率は現在の負荷に大きく依存し、開発された「自動化」、つまりスキルに大きく依存するため、時間の経過とともにパフォーマンスのレベルを維持する個人の能力の評価が必要です。たとえば、次のグラフは、通常の動作条件(緑色の線)と、アラームが発生/シミュレーション(ストレス)したとき(青色の線)のパフォーマンスレベルを経時的に示しています。

異なる条件下での勤務シフト中の人的ミスの確率の変化。 (勤務シフト中のスキル値)
午後(タリンタクシーの運転手によると)の最も危険な期間は11〜15時です。労働者の誤った行動と日常のリズムとの関連を研究したスウェーデンの科学者のデータに同意します。労働者が最も過ちを犯しているのは、これらの時間帯です。そして、これらのデータを引用しているスロバキアの科学者J.クルクは、昼間のこれらの時間の間に、運転者が運転中に眠りに落ちるケースが最も多いと述べています。夜になると、この観点から、真夜中から午前5時までの時間の方が危険です。
このようなグラフを使用して、特定のアクティビティに対する人の「準備状況」を評価したり、人員の長所と短所を取得したりできます。
人材スキルと「スキル」による人材エラーの確率との関係は、勤務シフト全体の確率の最大値として定義できます。
トレーニング中に達成されたスキルの実際の労働条件への移行の評価
ステレオタイプ移転の一般原則の知識は、トレーニングプログラムの開発とその有効性の評価の両方においてある程度必要です。
スキル転送
右手で追跡する方法を学んだ後、左手でも同じことを試してください。これはステレオタイプの転送の1つの例です。新しいスキルの習得は、それに先行する他のアクティビティから完全に独立することは決してないため、ある程度、どのようなトレーニングもステレオタイプの移転に関連しています。ほとんどのトレーニングプログラムでは、ステレオタイプの移転の問題が非常に重要です。トレーニングが職場で直接行われる場合を除いて、トレーニングプログラムの価値は、教えられたスキルのどの部分が実際の労働条件に移転されるかに依存するためです。したがって、たとえば、低高度でヘリコプターを操縦する場合、わずか15時間の専門の航法訓練で、約2000時間の一般的な飛行練習と同じ量が得られることがわかりました。その結果、トレーニングに費やした時間を完全に正当化する。ステレオタイプ移転の一般原則の知識は、トレーニングプログラムの開発とその効果の評価の両方においてある程度必要です。
タスクAを習得するときに、別のタスクBで得られた成績が、タスクBのみを調査した対照グループの評価と比較して改善した場合、AからBへの移行はプラスになります。タスクAは、たとえば、片方の手でディスクの回転を追跡することと、もう一方の手で追跡するタスクBで構成されます。タスクAを習得するとタスクBを習得することが困難になる場合があります。この場合、彼らは否定的な転移について話します。より複雑なケースでは、いわゆる遡及効果が観察されます。これは、最初にAが習得され、次にBが実行された後に発生します。その後、Aで2番目のテストが実行されます。このようなタスクBの挿入によりAのパフォーマンスが改善された場合、遡及的な増幅があります。挿入BがAのパフォーマンスを悪化させた場合、遡及的干渉(または遡及的抑制)が発生しました。
タスクAとBが類似しているほど、それらは互いに影響し合います。この場合、転移が正か負かは、表示と制御、刺激と反応などの両方のタスクの特性がどのように関連しているかによって異なります。 Osgoodの3次元表面[47]は、転送と遡及の間の関係に関する初期の作業の結果を要約する試みです。提示された刺激と両方のタスクで必要な応答の両方が非常に似ていて、それらが実質的に区別できない場合、転送は明らかに最大になります。すべての点で、アイテムAとBは同じアイテムのバリアントであるため、Aを学習することはBを学習することと同等です。
その他のケースは表に含まれています。 9.5は、靴業界からの例を使用して説明できます。タスクAで、必要な力(反応)でペダルを繰り返し押して、個々のステッチ(刺激)で構成されるブーツに継ぎ目を作り、タスクBを繰り返して、一連のネオンランプ(刺激)を点灯させます。電信キーを押す(反応)。これらの条件下では、刺激と応答の両方が両方のタスクで異なるため、ステレオタイプの転送はありません[56]。ただし、以前に訓練を受けた靴職人のグループに、通常のフットペダルを押して一連のネオンライトを点灯するように依頼すると、刺激は異なりますが、両方のタスクの応答は同じになります。
したがって、ポジティブ転送が発生します。経験豊富な靴職人は、訓練を受けていない人よりも、このバリアントのタスクBの実行に優れています。

表に示されている最後の関係オプションは分析がより難しく、Osgoodの表面はそれを不正確に説明しています。この例では、同じ刺激に対して異なる応答を要求することは、電信キーを押して靴屋にステッチを縫うように依頼することを意味します。このような手順を実行すると、負のキャリーオーバーが発生する可能性があります。新しい状況では、他の条件が同じであれば、人は通常、古い状況と同じように行動する傾向があります。条件が変更されたが、変更が完全に明確でない場合、新しい条件に対応しない古い反応が発生する可能性があります。検討中の例では、経験豊富なミシンオペレーターが、テレグラフキーを何度も軽くクリックする代わりに、長時間、多大な労力で押し続けることができる場合があります。しかし、個々のエラーにもかかわらず、一般に経験豊富なオペレーターがより良い結果を示す可能性もあります。両方のタスクに共通の類似性があるため、訓練を受けていないグループよりも。結果は、ポイントの付与方法に一部依存します。いずれの場合でも、タスクBをさらにマスターすると、エラーが次第に少なくなるため、最初は負の転送が正の転送に置き換えられることが判明する可能性があります。負のキャリーオーバーが発生する時期を予測することは容易ではありません。ただし、研究[25]から、刺激と応答の類似性を予測される転移の特性とリンクする3次元表面を使用して侵入型エラーを予測する試みが行われた場合、反応の類似性の度合いが増加するにつれて、2つのタスク間の干渉が増加することになります。これらの偶発的なエラーが重大であるかどうかは、契約の性質によって異なります。靴を縫うとき、負のキャリーオーバーによる偶発的なエラーは重要ではないかもしれませんが、飛行機を着陸させるとき、そのようなエラーは災害につながる可能性があります。このようなエラーは、タスクLとBで必要な反応が混同されやすい場合に発生する可能性が最も高いです。研修生は、両方のインセンティブが青信号であっても、サイクリングと注ぐコーヒーを混同することはほとんどありません。ただし、レバーの上げ下げ、ハンドルの時計回りと反時計回りの回転などの反応は、非常に混乱しやすいものです。しかし、飛行機が着陸すると、そのような間違いは災害につながる可能性があります。このようなエラーは、タスクLとBで必要な反応が混同されやすい場合に発生する可能性が最も高いです。研修生は、両方のインセンティブが青信号であっても、サイクリングと注ぐコーヒーを混同することはほとんどありません。ただし、レバーの上げ下げ、ハンドルの時計回りと反時計回りの回転などの反応は、非常に混乱しやすいものです。しかし、飛行機が着陸すると、そのような間違いは災害につながる可能性があります。このようなエラーは、タスクLとBで必要な反応が混同されやすい場合に発生する可能性が最も高いです。研修生は、両方のインセンティブが青信号であっても、サイクリングと注ぐコーヒーを混同することはほとんどありません。ただし、レバーの上げ下げ、ハンドルの時計回りと反時計回りの回転などの反応は、非常に混乱しやすいものです。混乱するのは非常に簡単です。混乱するのは非常に簡単です。
転移
の測定ステレオタイプの現実の状態への転移の深さは、トレーニング時間が増加するにつれて増加する傾向があります。場合によっては、採用されるトレーニング方法よりもトレーニング量の方が重要になることがあります。車のドライバーのトレーニングプログラムの調査では、トレーニングに映画を使用したか、自動車のシミュレーターを使用したかに関係なく、6時間の練習では、スキルの実際の運転への移行の深さが3時間の練習よりも高くなっています。ただし、転送深度はトレーニング時間の線形関数ではありません。この時間をさらに長くすると、通常はリターンが減少するため、トレーニングの有効性を判断するには、転送深度を常に測定する必要があります。
従来の測定方法では、新しいタスクへの最初の転送は、タスクAをマスターした人の指標の改善度を計算することによって評価され、Bのみをマスターした人と比較されます。転送グループとコントロールグループの指標の差(転送マイナスコントロール-精度を特徴付ける指標の場合) ;コントロールマイナス転送-通常、タスクBを完了する最初の試行に関連する速度またはエラーを特徴付けるインジケーター)は、潜在的な学習の総量の割合(パーセンテージ)として表示されます。典型的な式は次のとおりです。

ただし、タスクBを学習するときにキャリーオーバーが一定にならない場合があるため、学習の有効性を監視するには、より柔軟な評価方法が必要になる場合があります。
トレーニングのコストとフィールドワークのコストが通常は高いが、既知であり、規制の影響を受けやすいシミュレータを使用する場合は、さまざまなトレーニング量にわたって提供される価値の敏感な測定が特に必要です。シミュレータ自体、実際の条件へのそれらの近接度、および対応する伝達特性については説明しません。ただし、フライトシミュレータはマスタリングタスクAの良い例であり、その結果は実際のフライト-タスクBに転送する必要があります。一般的なタスクは、初心者に飛行を許可する前に地上シミュレータでどれだけのトレーニングを行うかを決定することです。
最も有用な指標は「節約」または「交換率」です。転送効率は、任意の量の地上トレーニングによって節約されたDST時間数によって推定できます。 [49]では、そのような効率の微分計と累積計が提案されています。必要なスキルを達成するのに10飛行時間かかり、1時間のパイロットシミュレータートレーニングの場合、必要な飛行時間は8.6時間のみで、節約時間は1.4時間です。シミュレーターでさらに1時間節約すると、わずかに節約量が少なくなる場合があります。 -たとえば、1.2時間とすると、シミュレータで2時間後の累積節約量は2.6時間になります。この値を2(トレーニング時間数)で除算すると、1.3に等しい累積転送効率係数(CECE)が1時間の地上トレーニング。対応する式は次のように書くことができます:



図のようにこの指標で測定される転送効率は、通常、単調に減少します。 5時間のシミュレータートレーニングでは、5時間の飛行時間が必要となり、キャリーオーバー率は1.0に低下します。パイロットのトレーニングに費やされた合計時間の観点から、トレーニング時間をさらに増やしても意味がないことは明らかです。基準がコストである場合、これは検討中の例ではかなり可能ですが、地上トレーニングを延長することをお勧めします。たとえば、シミュレータで1時間の飛行時間が1時間の3倍のコストになる場合、効率係数が0.33に低下するまで地上トレーニングを継続することは有益です。 15時間のトレーニング時間と5時間の飛行時間は、10時間の飛行時間と同じです。明らかにこの場合、転送効率係数は、トレーニング時間ではなく、コストの観点から表す必要があります。微分法に基づくコスト効率を最大化するより洗練された方法もあります。
トレーニングの有効性を評価するためのより簡単な方法も図1に示されています。 「L + B」方法では、タスクLの学習時間(または実際の演習の数、またはトレーニングのコスト)が、タスクBの転送後に必要なトレーニングの量を特徴付ける同じインジケーターとともに追加され、この合計が、練習量の可能な値のそれぞれについて計算されますタスクAで。両方のタスクのインジケーターの合計値が1つのタスクAのみの値を超えるとすぐに、トレーニングが非経済的になったと結論付けることができます。グラフでは、これは各タスクに5時間かかるポイントで発生します。これは、5時間のトレーニング時間と5時間の飛行時間は、標準の10時間の飛行時間を節約できないためです。この境界点が伝達効率係数を使用して決定されます。
適切に構築されたトレーニングプログラムは、それが意図されているタスクへのステレオタイプの伝達を最大化することに焦点を当てるべきです。高度な転送が達成されたら、総トレーニング時間を最適化する試みを行う必要があります。言葉遣い、視覚的および実践的なスキルを評価するための上記の方法のように、転移の定量的指標の使用は、学習の有効性の確保に貢献する必要があります。