ニューロンの相互作用の原理に基づいて構築されたニューロモーフィックプロセッサは、人工ニューラルネットワーク/マシンビジョンタスクの分野で最高の結果を示します。しかし、それらは脳で発生するプロセスを模倣することにはほど遠いです。多くの理由の1つは、最も豊富なグリア細胞である星状細胞です。
それらはニューロンをサポートする機能を持っていると考えられていましたが、研究者が1世紀以上信じてきたように、ここ数十年の研究は、このタイプの細胞がニューロン間のスペースを埋める以上のことをすることを示唆しています。研究によると、これらの細胞は、学習や、呼吸や歩行などのリズミカルな行動の基礎となる中央パターン生成(CPG)など、脳機能においても重要な役割を果たしています。
既存の神経好性ソリューションの短所
学習はニューロン間の強いつながりがある場合にのみ発生するという仮定は正しくありません。実際、学習と記憶は、カオス
の瀬戸際で巨視的に動作するネットワークで最適にバランスが取れています。狭い動的モード
は、学習アルゴリズムではほとんど無視されますが、脳によっても現れます。
ほとんどの場合、ニューロモーフィックソリューションは、グローバルネットワーク目標の計算効率とローカルのアクティビティ依存メカニズムの普遍性の組み合わせを欠いています。
神経-星状細胞ネットワーク
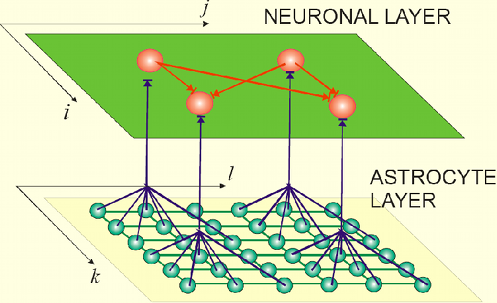
既存の文献のこのギャップを認識して、ラトガース大学の研究者は、星状細胞の機能も説明および再現する脳アルゴリズムを開発しています。
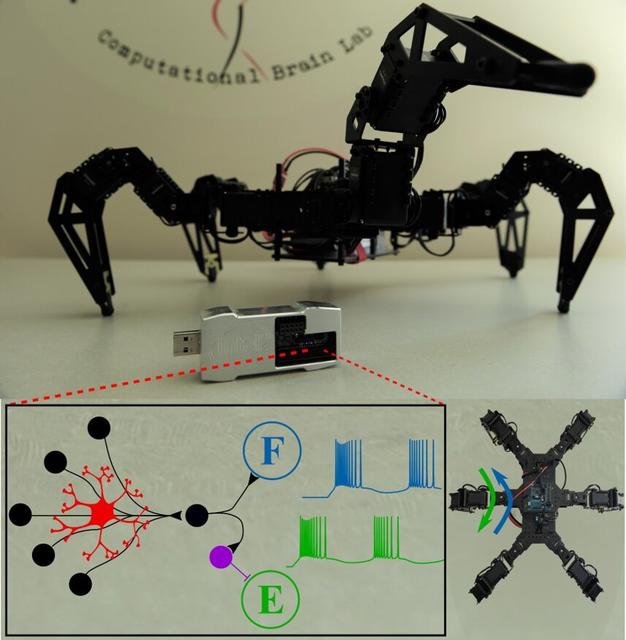
彼らは、ロボットの2つの歩行パターンを生成する包括的な神経星状細胞ネットワークに基づく脳形態のCPGコントローラーを提案します(注意してください、トートロジー)。新たに特定された星状細胞の神経調節メカニズムに基づいて、チップとロボットオペレーティングシステム(ROS)環境の間のリアルタイム相互作用環境を使用して、IntelLoihiニューロモーフィックチップにシームレスに統合するCPGアーキテクチャを提案します。
Loihi CPGは、感覚ノイズや可変速度プロファイルに耐性のある歩行ロボットを制御するために使用できます。
脳の働きを模倣する分野での新しい建築的アプローチの開発を観察することは非常に興味深いことです。将来の私たちの生活を大きく変える研究と実験が進行中です。そして私たちの仕事。