この少量の作業は、以前に開発されたストリングモデルに基づいて、約1年前に教育およびデモンストレーションの目的で緊急に実行されました。いつものように、しばらくアイドル状態だった後、彼女は最近私の目を引きました。
Scilabが何であるかを伝えることには意味がありません-読者はインターネットの使い方を知っています。

すでにScilabに精通している読者にとって興味深いのは、この作業はこのツールのかなり重要なアプリケーションである可能性があります。これは、システムモデリングおよびオシロスコープを使用した結果のアニメーション表示に対する「有限要素」アプローチを指します。もちろん、メカニックのために特別に「研ぎ澄まされた」ツールもありますが、繰り返しますが、目標はScilabを緊急にテストすることでした。
これまでこのシンプルで視覚的なツールに慣れていなかった人にとっては、これを知ることは興味深いでしょう。無料のXcosをインストールしてから次のテキストを作成するまで、これまでなじみのないタイプのソフトウェア(ビジュアルプログラミング)を習得するプロセス全体に5日かかりました。 2日目に、1つの自由度を持つシステムのより単純なモデルがついに完成しました。そして、あなたにとって、このソフトウェア環境の研究の事柄は、必要に応じて悪化することはないので、それを選択してください。
もともと幅広い聴衆を対象としていなかったので、テキスト自体はおそらくあまりにも簡潔すぎます。しかし、読者に質問があれば、私は詳細を覚えて、これらの質問に答えようとします。そう。
この記事 で詳細に検討されている機械システム(「粘性媒体内の振動ストリング」)は、次のことを表しています。
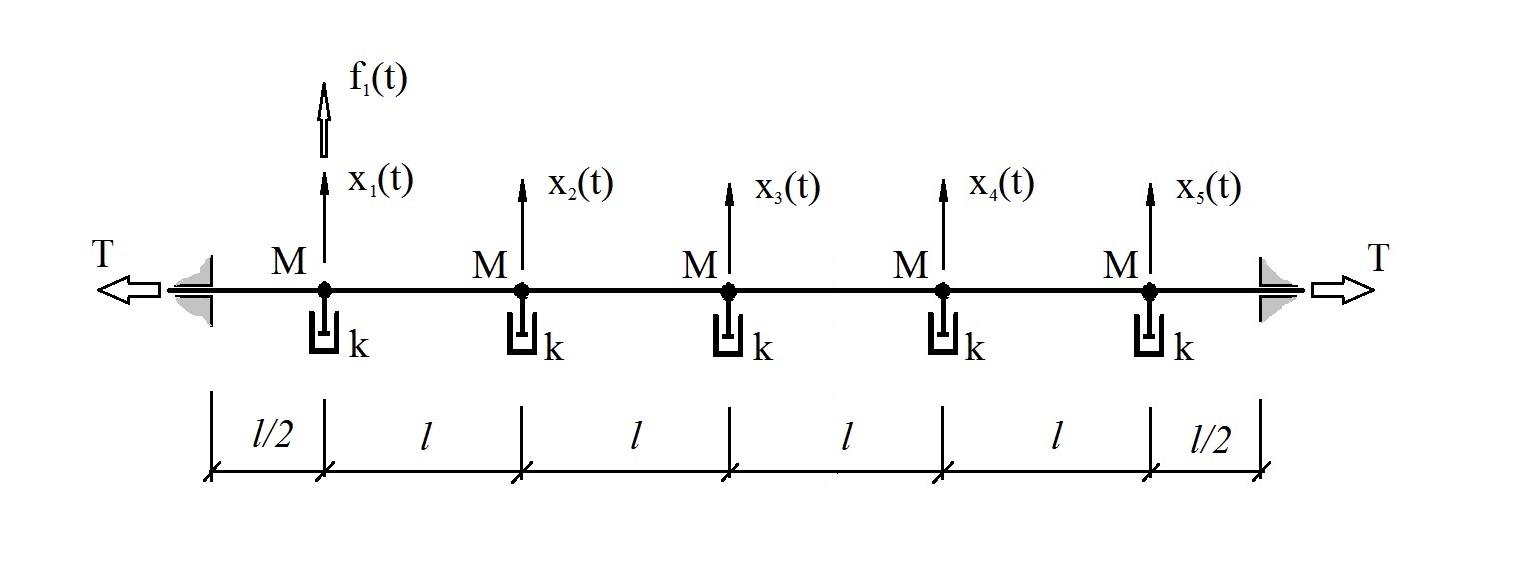
ここで、Δt= 0.01s、l = 1m、M = 1kg、k = 10 kg / s、T = 2000H
モデリングとモデルを変更する可能性を拡大すると、モデルは

サブシステム(「スーパーブロック」)としてモデル化された要素に分解されます。
次の「図」(モデル)は、ビジュアルプログラミングシステムXcosに組み込まれています。
「図」(モデル)を使用すると、ノード(要素)No。1に適用された単一のインパルスの影響下でのシステムの動作をシミュレートでき、ノードNo. 1での外部の影響と、ノードNo. 1、2、3、でのシステムの応答(変位)を登録してグラフィカルに表示できます。また、アニメーション化された条件付き画像の形式でシステムの動作を視覚的に表示します。
「図」に含まれる5つの「スーパーブロック」(サブシステム)のそれぞれは、以下を表します。

ブロックは、外部の影響、共役要素の長さと変位、クロック時間、時間サンプリング間隔の値、およびストリング張力に関するデータをメインシステムから受け取ります。設定のブロックには、長さ、質量、減衰係数に関するデータが含まれており、シミュレーションの目的で変更できます。 (Xcos開発者によって宣言されたブロックをブロックする可能性は、明らかにソフトウェアの誤動作のために実現できませんでした。)
ブロックは、有限差分法によって対応する線形ODEを統合します。ゼロ統合の初期条件は、Xcosシステムのデフォルトを使用して実装されます。
ブロックは、その動き(システムクロック時間)と長さ(一定)に関するデータをメインシステムに送信します。
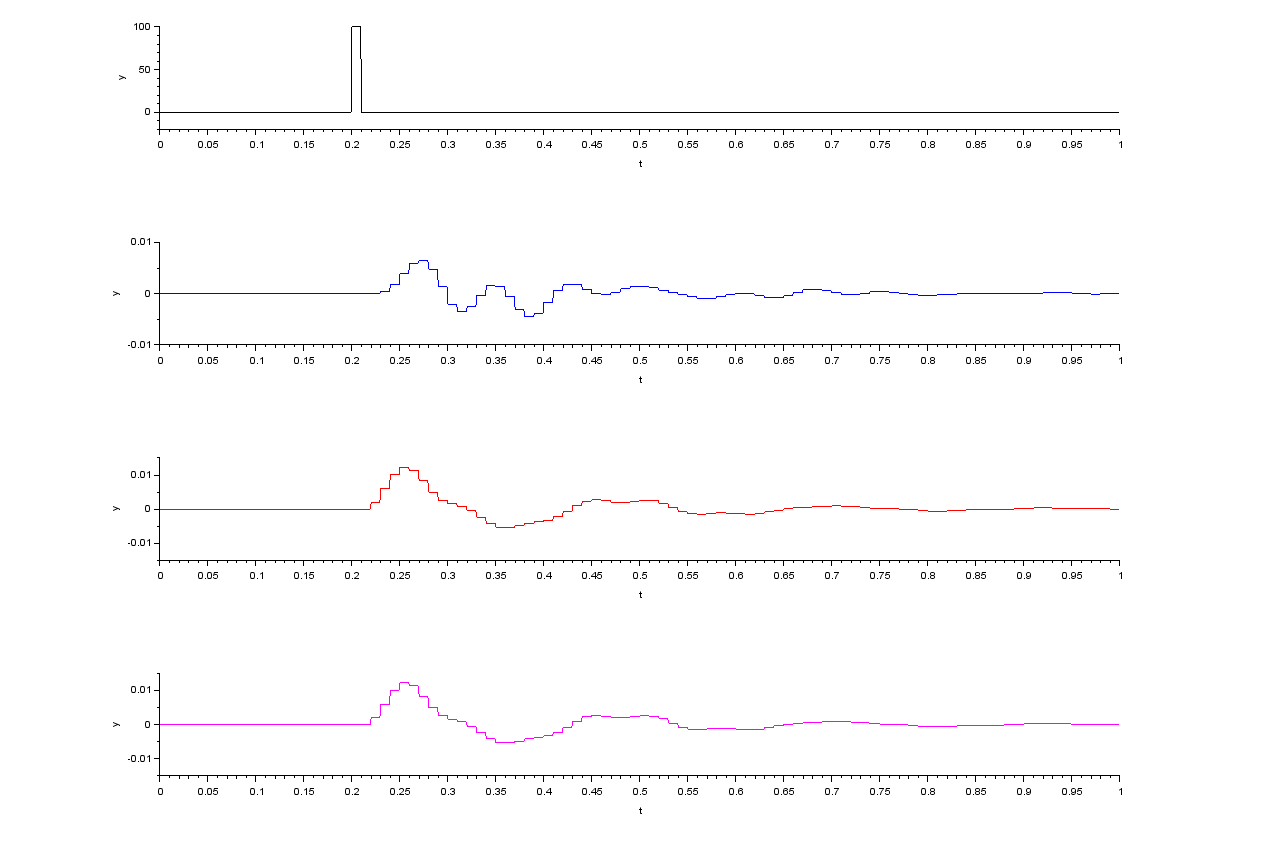
以下のシミュレーションモデリングの結果が得られました。

さらに、システムの共振特性をより完全に開示するために、ストリングの中央(ノードNo. 3)に外部の影響を加えて、前のシミュレーションと同様のシミュレーションを実行しました。
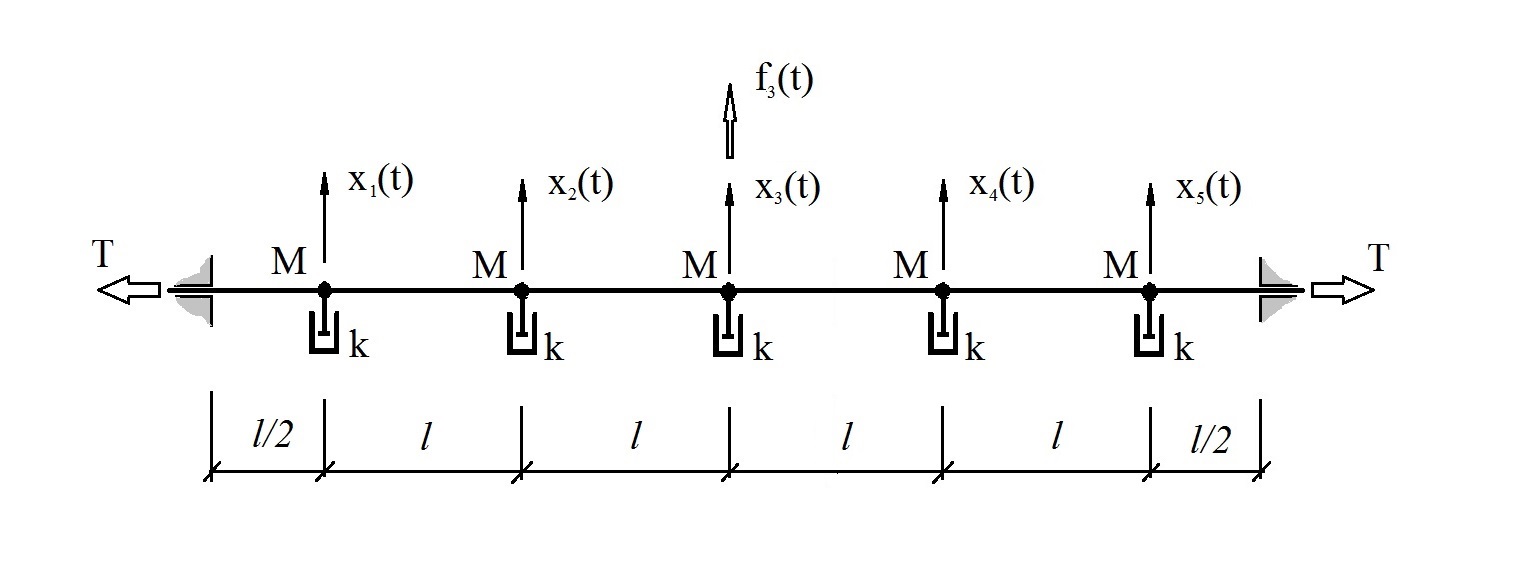

シミュレーションモデリングの次の結果が得られました

。皆さん、Scilabを学んで頑張ってください。