UAVCANは、オンボードモバイルネットワーク用のオープンで軽量なプロトコルです。最近、その開発者兼メンテナーであるPavel Kirienkoスピムプロトコルについて話しましたPX4開発サミット、周りのオープンソースのエコシステムを使用して、主要なドローンコミュニティ会議PX4の自動操縦UAVCANが一部です、。また、パベルは、彼の報告を受けて、ハブレに関するロシア語圏のコミュニティ向けの詳細な記事を作成しました。
この記事では、UAVの自動制御システムの開発者の観点から、プロトコルを使用する実際的な側面について説明します。UAVCANをどのように選択したか、それをどのように使用するか、そして将来どのような機会が見込めるかです。

ハイブリッドUAV
垂直離着陸(VTOL)航空機は、コプターと飛行機のハイブリッドであり、翼の空力リフトによりコプターよりも長持ちし、従来の航空機ドローンのように滑走路や発射装置、パラシュートを必要としません。そのようなデバイスの開発は現在、人気があり有望な方向です。このようなデバイスは、配信、マッピング、監視、およびその他の目的に使用できます。ほとんどの飛行タクシープロジェクトは、同じ設計原則に基づいています。次に例を示します。
- ドイツの会社リリウムの完全電気エアタクシーリリウムジェット;
- SebastianTrunによるKittyHawk社の低ノイズHeaviside電気航空機(多くの人が無人車両から知っています)。
- AirbusのVahanaプロジェクト。

イノポリス大学の垂直離着陸航空機
私たちは、翼幅、ペイロード、電源が異なる小型無人航空機の3つのモデルを開発しました。これらはすべて電気式で、内部燃焼エンジンを備えています。私たちは、航空機の設計に関してカザン航空研究所およびカザンの航空企業と協力しており、私たちの仕事の焦点は、電子機器、アルゴリズム、および自動制御です。
UAVCANはそれと何の関係がありますか?
ドローンビジネスの人にとって、典型的な制御構造は次のようになります。
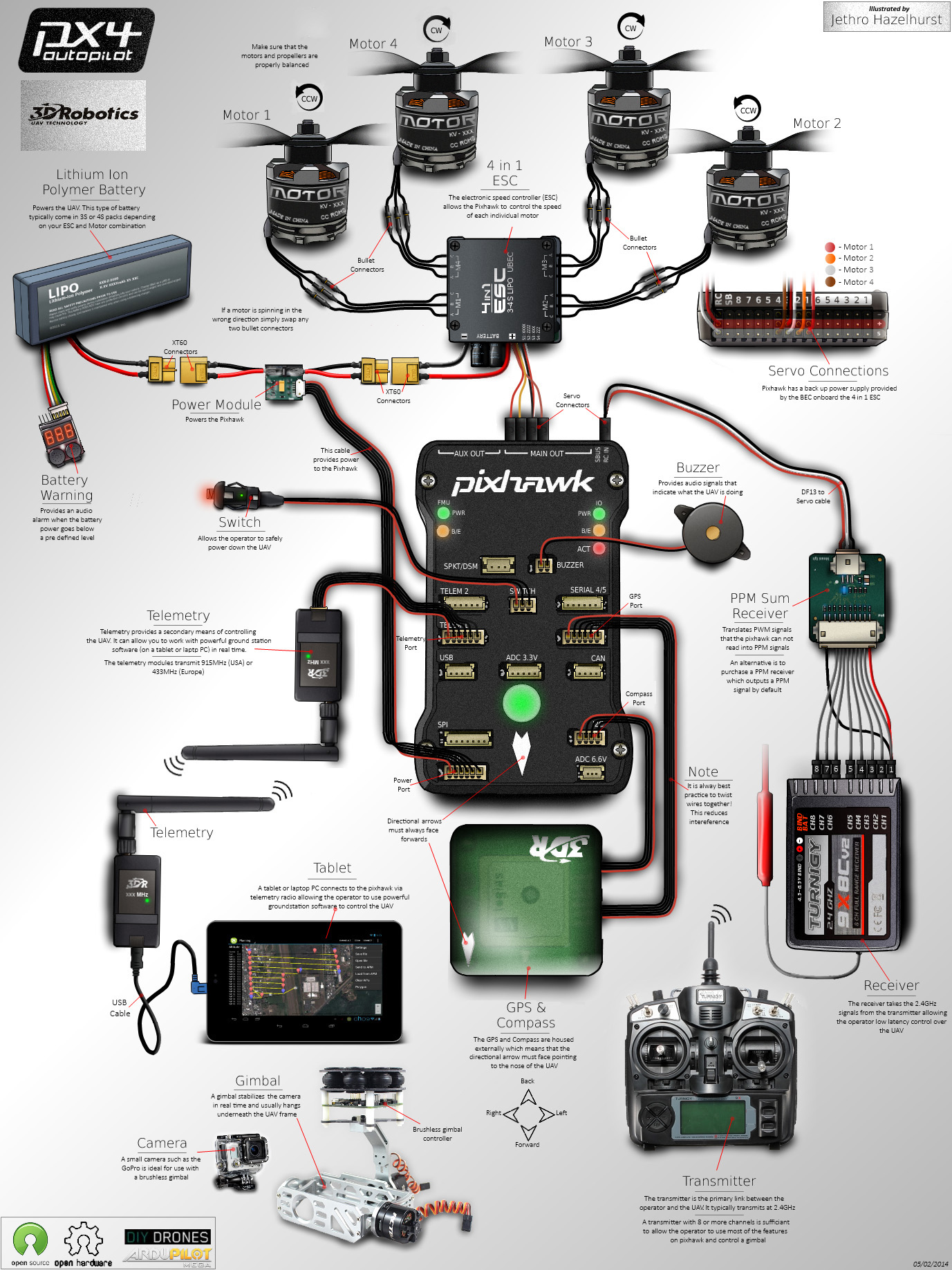
PX4自動パイロットに基づく典型的なUAVレイアウト。ソース
モーターはスピードコントローラー(ESC)によって制御され、オートパイロットからの設定値はPWM信号を介して供給されます。センサーは、UART、I2C、SPIなどのさまざまなインターフェイスを介して接続されます。さらに、テレメトリー、リモートコントロール、電源など、ワイヤーからこのような「スパイダー」を取得します。しかし、これは主な問題ではありません。
ワイヤが長いほど、つまりデバイスが大きいほど、この回路はピックアップの影響を受けやすくなります。私たちの航空機の翼幅は2メートルと4メートルであり、これが制限ではないため、最初からこれについて考える必要がありました。
以前は、40メートルの飛行船のプロジェクトでCANを使用していました(プロトコルのみがCANOpenに基づいていました)。そして、UAVCANを使用するという決定は、私たちにとって当然のことでした。PX4はすでにサポートされており、これについてチーム内で争いさえありませんでした。当初は、翼幅の異なる航空機にソリューションを拡張するために、長いPWMラインをデジタルインターフェイスに置き換えたいと考えていました。
UAVCANはUAVのCANではないことが判明しました
PWMリンクをUAVCANリンクに置き換えることで、長い配線やノイズの問題を心配する必要がなくなり、自動操縦への接続数も大幅に削減されました。
これを行う方法には2つのオプションがありました。1つ目は、UAVCANインターフェースを備えたモーターガバナーとサーボドライブを使用することです。そのようなものは、例えば、Zubaxにあります。2つ目は、ESCのすぐ隣にインストールされるUAVCANアダプターを作成することです。UAVCANインターフェイスを備えたESCの選択肢が少ないため、2番目のオプションを選択しました。最初はUAVCANfor Hobbyists(UC4H)プロジェクトのアダプターを使用し、次にDC-DCコンバーター、独自の回路、ファームウェア、およびボーリングダイオードを内蔵した独自のデバイスを作成することにしました。
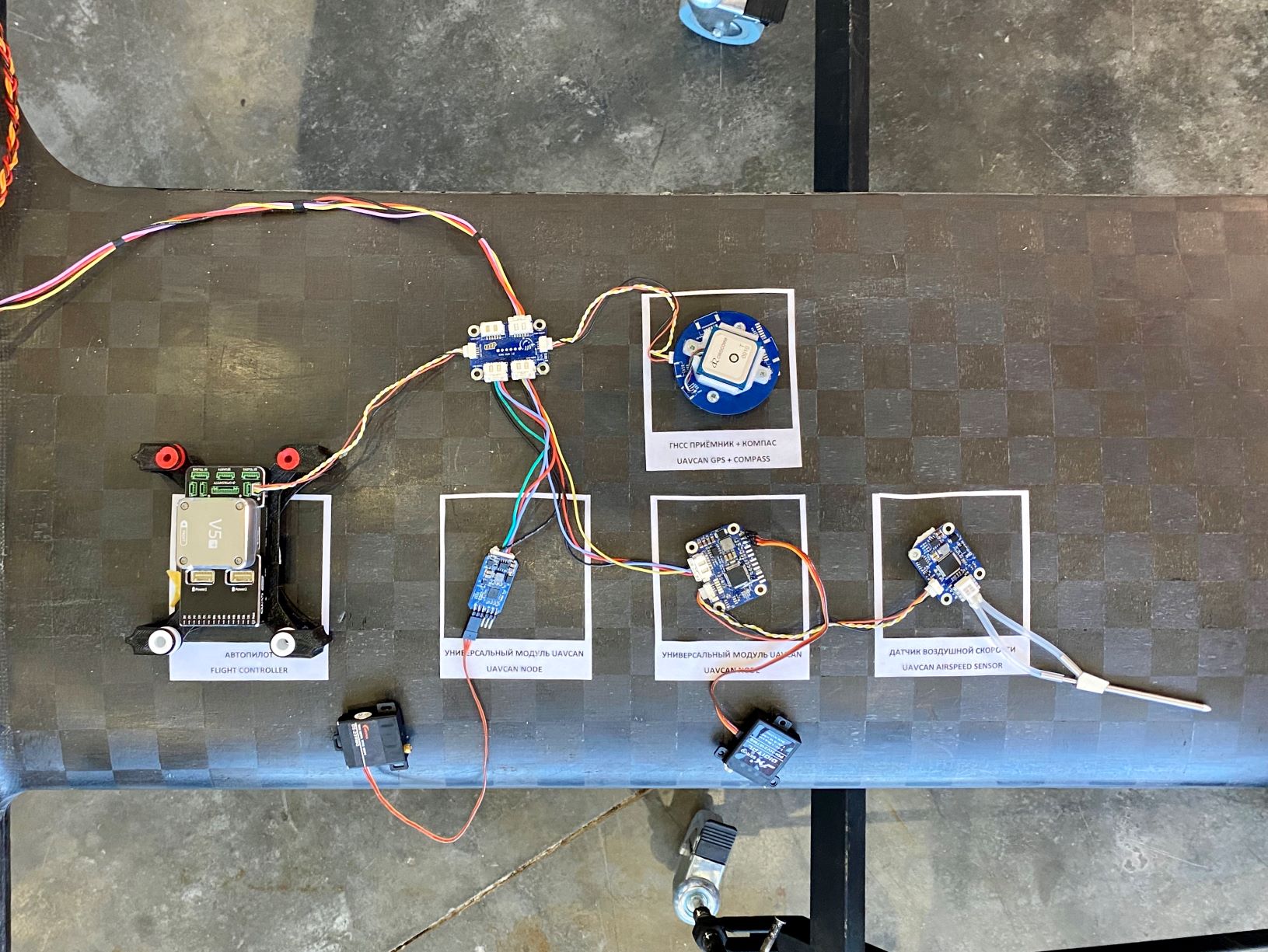
UAVCANインターフェースを備えたデバイス
味わった
その後、12本のワイヤーの代わりに、UAVCANバスを使用して、アクチュエーターだけでなく、ほとんどの外部デバイスとも相互作用できることに気付きました。また、特別なプラットフォームに設置されたコントローラーの防振にも効果があります。その結果、私たちは自分たちで使用するための多くのデバイスを開発しましたが、今ではそれらが他の人にとって興味深いものであることがわかりました。
- 最大4チャネルのコンバータCAN-PWM:デバイスはCANバスに接続され、制御信号を受信して処理し、PWMを出力します。最大60Vのバッテリーからボードに直接電力を供給することができます。これには、ボードと消費者に5 V(3 A)の電圧を供給するDC-DCコンバーターが含まれています(サーボマシンなど)。
- GPS /マグネトメーター/バロメーター;
- , Power Management Unit (PMU): ( ). . — , DC-DC . 1000 . CAN ;
- ;
- ;
- ;
技術的には、これらのデバイスはSTM32マイクロプロセッサに基づいています。私たちは自分たちで設計し、pcbway.ruで生産を注文します。ファームウェアはlibcanardを使用して実装されます。
UAVCANを使用するための私たちの感覚は、かなり低いエントリしきい値です。新入社員は、STM32とPX4の両方の自動操縦側の距離センサーを把握してプログラムするのに1週間もかかりませんでした。

新しいデバイスを小さな暗いドローンでテスト
してから、飛行機で使用します。
すべてのモードでのVTOL航空機のテスト飛行の短いビデオ
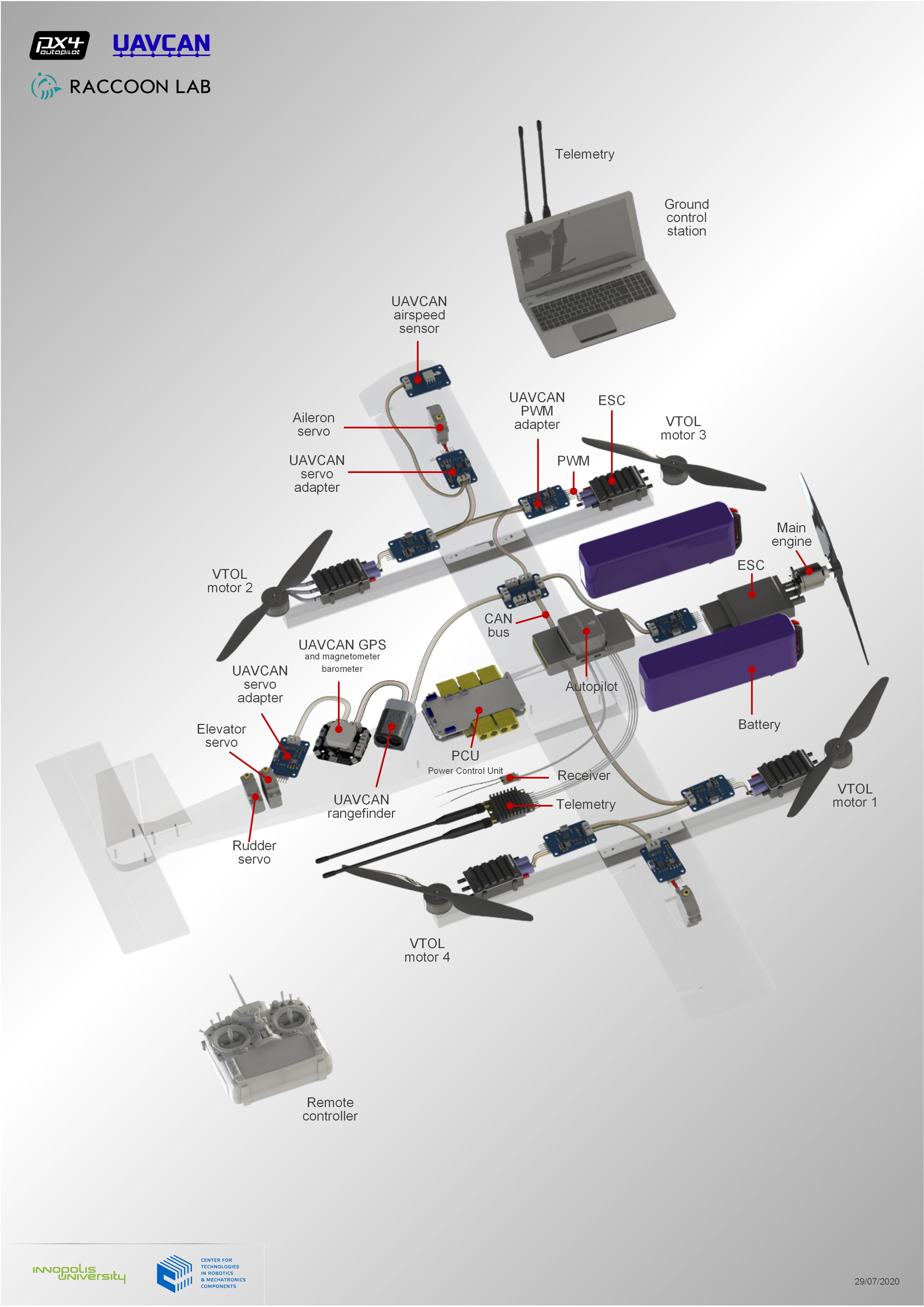
その結果、図は次のようになります。UAVCANセンサーとアクチュエーターを使用したVTOL航空機の図
UAVCANが将来私たちにどのような利点をもたらすか
予約
UAVに基づく製品の実装で最も重要なタスクは、信頼性を確保することです。私たちはすでにこれに取り組み始めています。たとえば、GPSセンサーとエアスピードセンサーのいくつかを接続して並列に使用できます。しかし、やるべきことはまだたくさんあります。ほとんどの場合、CANバスを使用したセンサーとコントローラーの複製が容易になります。2つのバスをPixhawkに接続し、冗長性のためにバス上に複数の同一のセンサーを残すことができます。
スケーリング
将来的には、離陸重量が30kgを超える大型車を作りたいと考えていますが、これは証明が難しいです。UAVCANに基づくアーキテクチャの拡張性により、野心的な計画を立てることができます。
真のHILシミュレーション
現在、都市環境でのUAV運用のトピックは、活発に発展しています-Urban Air Mobility(UAM)。 UAMタスクを実装するには、カメラやリダーなどのセンサーにさらに依存する必要があります。ここでは、インテリジェント制御システムを開発およびデバッグし、それらの信頼性を高める必要があります。これらの目的のために、別のイノポリス大学チームが、テスト、デバッグ、およびトレーニングのために、Unity3Dに基づく自律移動オブジェクト用のイノポリスシミュレーターを開発しています。イノポリスシミュレーター VTOL航空機では、イノポリスシミュレーターをガゼボと組み合わせて使用し、フォトリアリスティックシミュレーション、制御テスト、センサーデータ(リダーとカメラ)の処理を行います。

現在、Gazeboの代わりに、より正確なエアロダイナミクスを備えた独自のダイナミクスシミュレーションモジュールと、別の機能である真のHILシミュレーション(ループ内のハードウェア、またはソフトウェアとハードウェアのシミュレーション、PAM)に取り組んでいます。
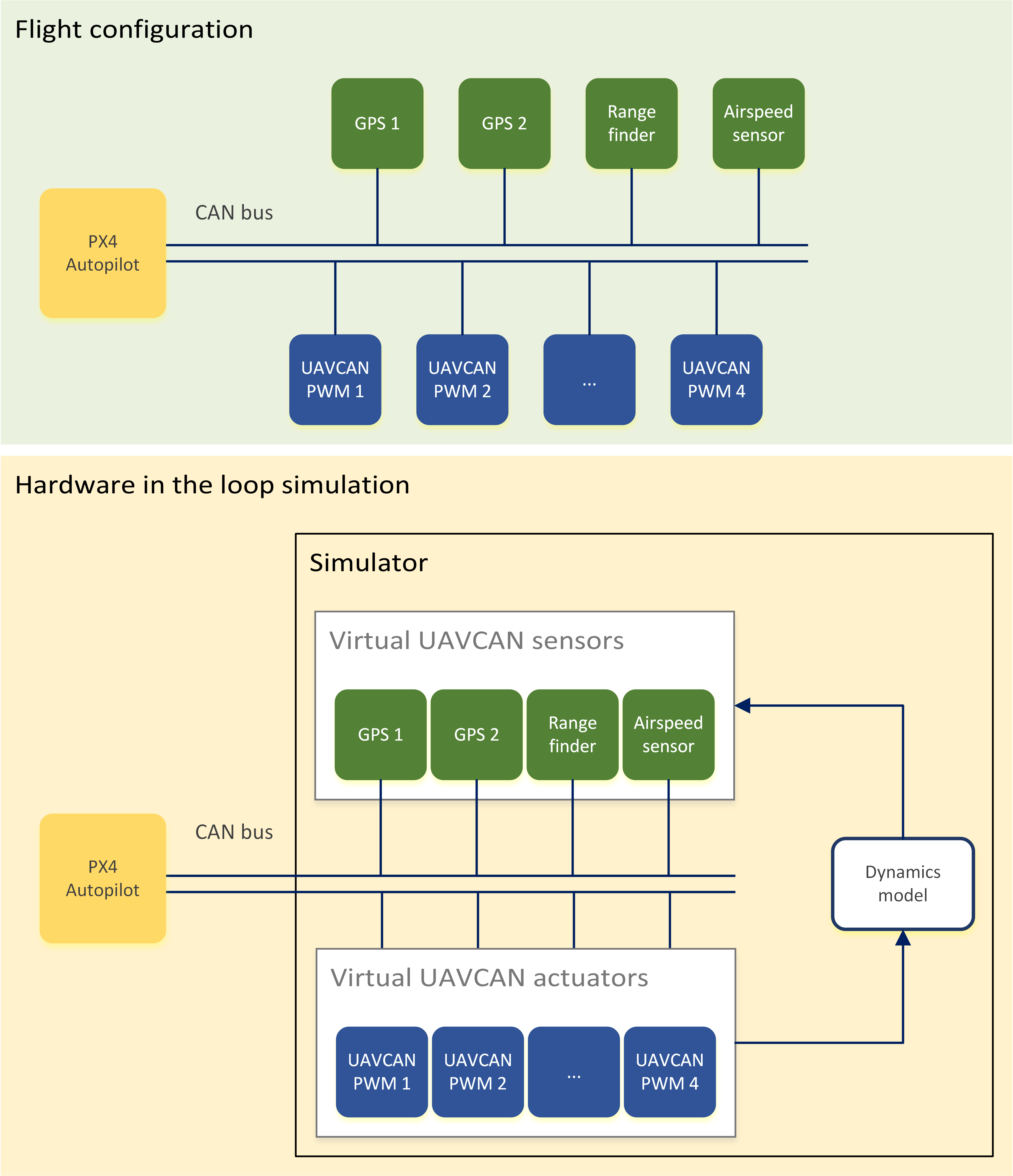
私たちのソリューションでは、すべてのデータはセンサーから取得され、モーターとサーボへの制御はUAVCANバスを介して送信されます。これらのセンサーを同じバスレベルでシミュレートするためのモジュールを作成してみませんか?デバイスの代わりに、シミュレーターを備えたコンピューターをコントローラーに接続するだけです。
現在、PX4でのHILシミュレーションは、センサーとアクチュエーターをシミュレートする特別なHIL_ *メッセージMAVLINK(テレメトリープロトコル、シリアルポートまたはUDP / TCPで動作)を使用して実行されます。
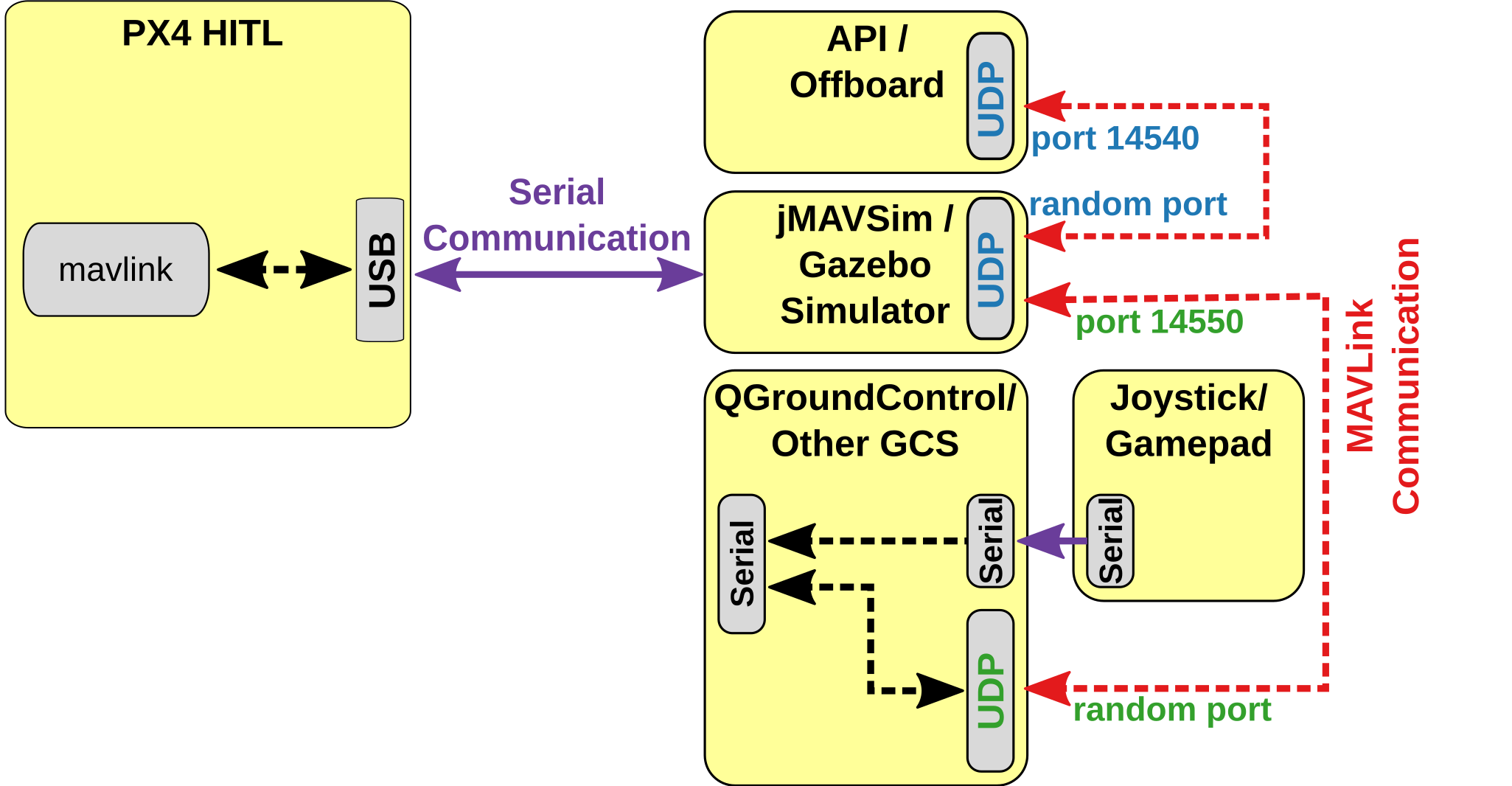
HITLモードでのPX4動作の図。ソース
シミュレーションは、現在PX4に実装されているため、「戦闘」フライト構成とは異なり、フライトコントローラーの個別の操作モードです。 UAVCANメッセージを直接シミュレートします。理想的には、自動パイロットはシミュレートされた環境で何が機能しているかさえ知らない可能性があります。ただし、自動パイロット内にあり、CAN経由で接続されていないIMUをシミュレートする問題は、まだ概念的に解決されていないことを言わなければなりません。UAVCANを使用したHITLモードでのPX4操作の提案されたスキーム このソリューションは、シミュレーターでのデバッグ結果の信頼性を高めるため、より安全に飛行テストに進むことができます。航空HILシミュレーター。ソース デバイスがインターフェイスレベルでシミュレートされる場合の同様のアプローチ、

大型航空で使用されますが、UAVCANを使用すると、アクセスしやすく簡単になります。
出力
UAVCANプロトコルの軽量性、信頼性、「リアルタイム」の問題、そして最終的にはPX4、ROS、Linuxが何であるかについて、すでに考えられているのは素晴らしいことです。これらすべてがなかったら、私たちがコプター、飛行機、制御システム、プランナーを作るのは非常に難しいでしょう。
プロトコルとソフトウェアの標準化により、開発者は同じ言語を話すことができます。同時に、標準化だけでなく、アクセス性も重要です。これにより、オープンソースのアプローチが高度に提供されます。これにより、巨人の肩に立って、仕事のための長い「インフラストラクチャ」を構築するのではなく、すぐに彼らのタスクに進むことができます。これは、この記事の例で示したと思います。

フライトが成功した後、コールドブルーを飲みます