非常に物議を醸す、非常に珍しい、非常に奇妙ですが、それは機能します!建築、コラボレーティブロボティクス、無人航空機の交差点。紹介:Tensodrone™。

Tensodrone(Tensodron)-テンセグリティの原理に基づいて作られた、衝突から保護する新しいデザインのマルチロータータイプの無人航空機(UAV)。このアプローチは、保護ケージと構造フレームの設計を組み合わせることにより、軽量で耐衝撃性を向上させます。
このプロジェクトは、イノポリス大学に基づいた「ロボティクスおよびメカトロニクスコンポーネントの技術」の方向でのNTIコンピテンスセンターのさまざまなチームの相互作用の鮮明な例です。
ドローンが落ちている

ソース
彼らが飛ぶという理由だけで。制御システム、モーター、センサー、自動操縦装置、オンボードコンピューター、およびソフトウェア-開発者はこれらすべてを可能な限り確実に実行しようとしますが、コプターがクラッシュするリスクは残ります。そして、これがプロトタイプである場合、デバッグのために一度にいくつか(数個または数十個?)を作成する必要があります。内部要因に加えて、明らかに、外部要因が残っています:風、受動的な障害物、能動的な影響。
ドローンが落下し、衝突し、転覆する、と誰もが主張することはほとんどありません。
あなたはこれを避けようとすることができます、あなたはそれの準備をすることができます。何がいいですか?それは開発者、ユーザー、立法者次第です。
私は両方のアプローチを一緒に使用することに賛成です。ただし、この記事では、UAVの落下または衝突の結果を回避する方法に焦点を当てます。
保護構造
UAVの落下または衝突の結果を回避するための最も簡単なアプローチは、保護ケージおよびその他の保護構造です。ここには2つのタスクがあります。ドローンを損傷から保護することと、ドローンが動作する環境とその中の人々をドローンから保護することです。
ドローンから人々を保護する可能性が高いデザインの基本バージョンは、プロペラガードです。

プロペラガード付きAR.Drone2.0ドローン。出典EPFLのDarioFloreano教授のチームによって開発された、折り畳み式の柔軟なプロペラガード(さらにはフレームデザイン)を備えた、折り紙に着想を得た楽しいソリューション
もあります。 ドローン自体(および同時に人々をドローンから保護する)を保護するための一般的な設計は、保護ケージです。クワッドコプター自体はケージの中にあります。ドローン
ロシアのCOEXのクローバー
ロシアの会社COEXは、トレーニング用のドローンを製造しています。ドローンには、デフォルトでプロペラガードと、オプションで保護ケージがあります。
ドローンフライアビリティELIOS
スイス(スイス-首都ドロノストロエニヤ?)フライアビリティ会社-は、敷地内で検査を行うための保護ケージを備えた、おそらく最も商業的に成功したコプターELIOSを製造しています。デザインの独創性は、安定化の可能性を備えた可動サスペンション上のコプターのフレームに保護ケージを取り付けることにあります。

Drone Dronistics
EPFLのDronisticsスタートアップ(スイス、Dario Floreanoグループ)は、商品を安全に配送するための折りたたみ式ケージ付きのドローンを提供しています。
まだ休憩

このようなドローンの欠点は、構造物の重量が増えることです。保護ケージとUAVへのアタッチメントを携帯する必要があります。保護構造の重量を減らしたいという願望は、その強度の低下につながります。
可変ジオメトリのドローン
頑丈なドローン(だけでなく)のアイデアに関連する別の方向性は、折りたたみ式ドローンと可変ジオメトリ(折りたたみ式とモーフィング)のドローンです。これは、飛行中にドローンの形状を変更する能力を指します。ドローンの損傷を防ぐために折り畳み式の構造が作られ(たとえば、ドローンは衝撃の前に「しわくちゃになる」ことがあります)、たとえば、ドローンは狭い窓を飛ぶためにコンパクトなサイズに折りたたむことができます。
スイスからのクールな可変ジオメトリドローンビデオを見たことがあるかもしれません(はい、ETH + EPFL + UZHです)。このアイデアも興味深く、私たちに近いです。理由は後で説明します。
可変ジオメトリのドローン
緊張感
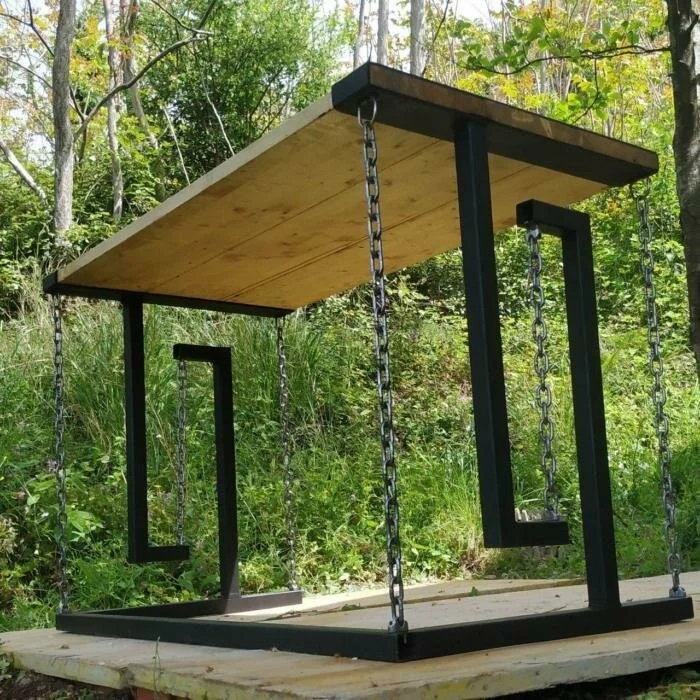
緊張度表。
Tensegrityのソースは、各要素が最大の効率と経済性で動作するように、圧縮固体要素と引張構成要素の相互作用を活用するフレーミング構造の機能です(Wiki)。この用語は比較的新しく、1960年代に登場しました。上の写真のテーブルは、緊張の原則のために、脚がない状態で立っています(またはぶら下がっています)。
建築におけるこのアプローチの多くの現代的なアプリケーションがあり、それが現れたところから、主に橋の設計にあります。

世界最大のテンセグリティブリッジ、オーストラリア。ソース
別の用途:)
ロボット工学における緊張
ロボット工学の最も古い分野の1つである産業用マニピュレーターは、現在、いわゆるに関連する開発の新しい段階を経験しています。共同ロボティクス。この分野の専門家のスピーチでは、剛性とコンプライアンスという2つの用語が頻繁に聞かれます。
産業用ロボティクスでは、コンプライアンスという用語は柔軟性とコンプライアンスを指します。非準拠の堅いロボットは、どんな外力が作用していても機能するデバイスです。ロボットのエンドエフェクタは、毎回まったく同じ経路をたどります。一方、準拠ロボットのエンドエフェクタは、さまざまな軌道に沿って移動してタスクを完了し、オブジェクトにさまざまな力を加えることができます。たとえば、ロボットは卵をつぶさずにつかむことができます。制御された剛性は、協調ロボティクスの中心です。
ロボティクスで緊張感を使用するためのアイデアは、協調的で「ソフトな」ロボティクスから生まれました。張力構造は軽量で耐衝撃性があり、剛性(コンプライアンス)と構成(形状)を制御することができます。
ロボット工学における張力の適用の最も有名な例は、惑星表面の研究に使用されることが計画されていた、折り畳み式の地上ロボットであるNASAのスーパーボールボットです。ケーブルとケーブルの球形構造のおかげで、ロボットは宇宙船から惑星に落下したときの大きな高さからの落下に耐えることができます。表面に着くと、ロボットはケーブルやロッドの長さを制御することにより、任意の方向に回転できます。
NASA SUPERballv2のIEEEスペクトラムビデオ
イノポリス大学の緊張ロボット
UIでは、剛性が変化する応力結合構造(これは張力です)を備えたロボットシステムをモデル化、設計、および制御するための数学的装置を開発しています。これは、緊張マニピュレーターや歩行ロボットなど、さまざまなロボットに見られる基本的な作業です。
テンセグリティマニピュレーターであり、UI Oleg Balakhnov
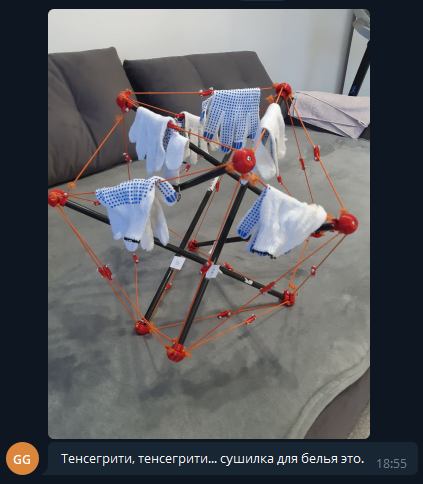
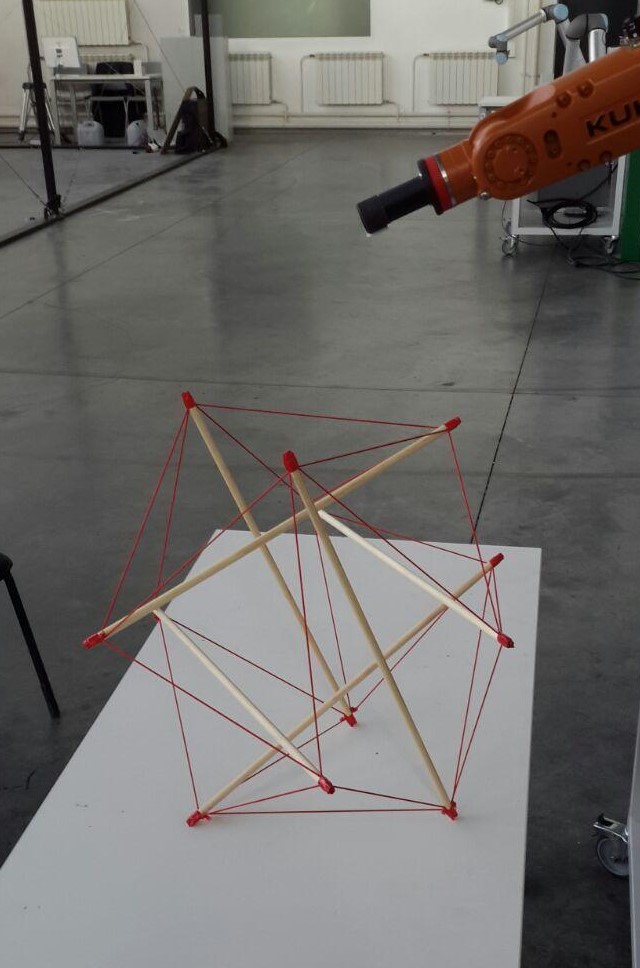
Olegの卒業生および研究員は、最初に木の棒とゴムバンドからテンセグリティロボットのプロトタイプを作成し始めました。寿司棒の構造の写真は、おそらく、チャットの歴史も保持しています。
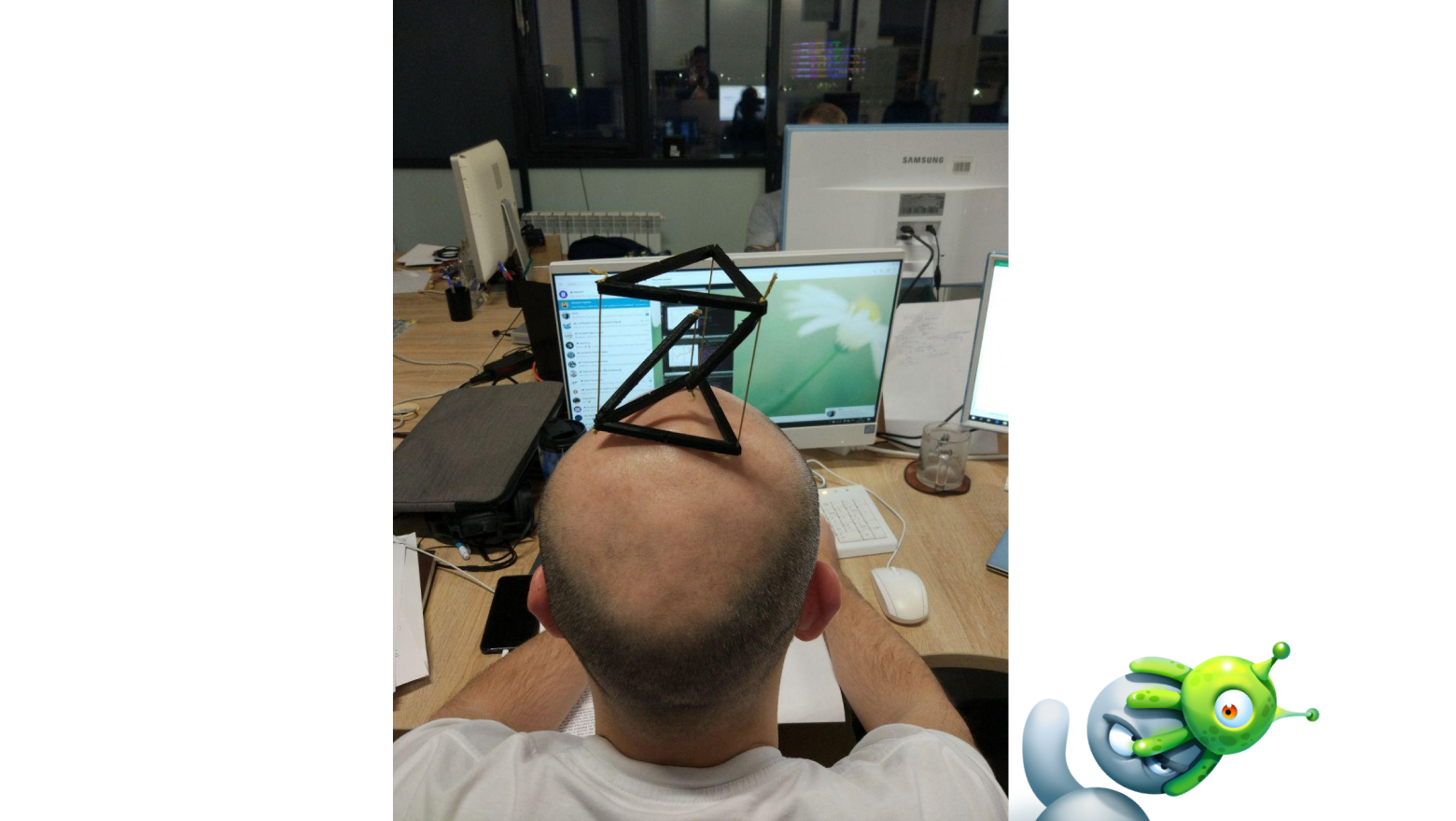
Tensegrity Vibrobot
-
-
相乗効果

あなたはおそらくすでにそれを手に入れました
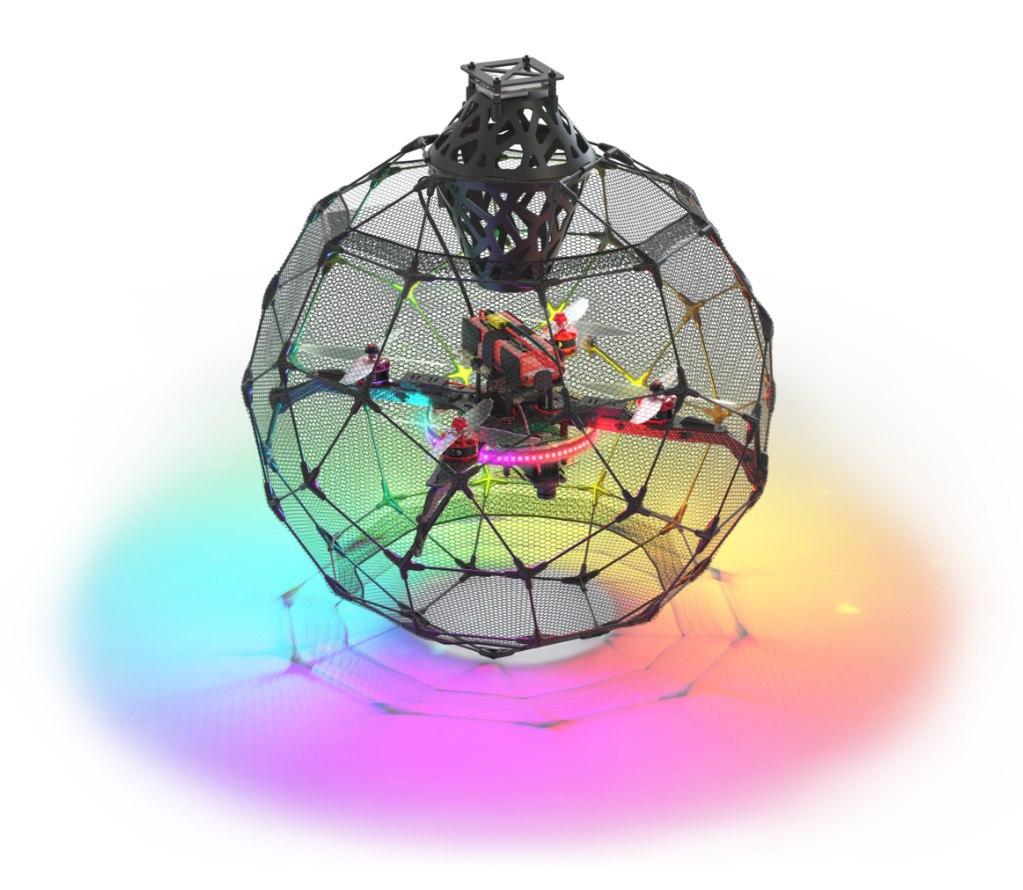
私はドローンを持っています、私は緊張しています。うーん!(テンソドロン)
ガレージに入ると、人目を引く奇妙なデザインを通り過ぎました
。「これは何ですか?」と尋ねました。私は、「殺せない構造-それを落とすが、壊れない」と言われました。
私は壊れました(実際には縮んだだけです-ゴムバンドが緩んでずれていたために形が変わりました)。しかし、ドローンにはそのようなデザインが必要です!そして、私たちは冒険的な実験を始めました。
緊張サバイバルテストビデオ
より厳しいテスト
Squishy robotics — , - , ,
Squishy robotics — , - , ,
冒険

セルゲイは冒険的な実験を承認します。ジェフ・ベゾスは
セルゲイ・サヴィンでもあります-上級研究者、准教授、25歳で博士号を取得した真面目な科学者であり、多くの評価された出版物です。彼はUIでのTensegrityRoboticsの創設者の一人であり、Tensegrity inRoboticsを開発するためのいくつかの助成金を受けています。
イゴールはアイデアを検討しています
ドミトリー、オレグ、ヘイニーが最初のテンコドロンを集めます(何かのように見えます)。ドミトリー・デヴィットGigaFlopsis-大学の研究者および大学院生であり、最新の技術を適用した人-カーボンチューブとケブラースレッド、カーボンと軟質プラスチックを使用した3D印刷は、すべてを実装して飛行させました。

ウラテンソドロンを組み立てるプロセス

。起こりました!
ハエ!
ドミトリーはまた、彼のフライトの壮大なビデオのテンソドロンの後の最初の俳優です。割合:
2人の俳優が主演するゲーム。DeluuusiOnによるビデオ
プロトタイプ構築の詳細
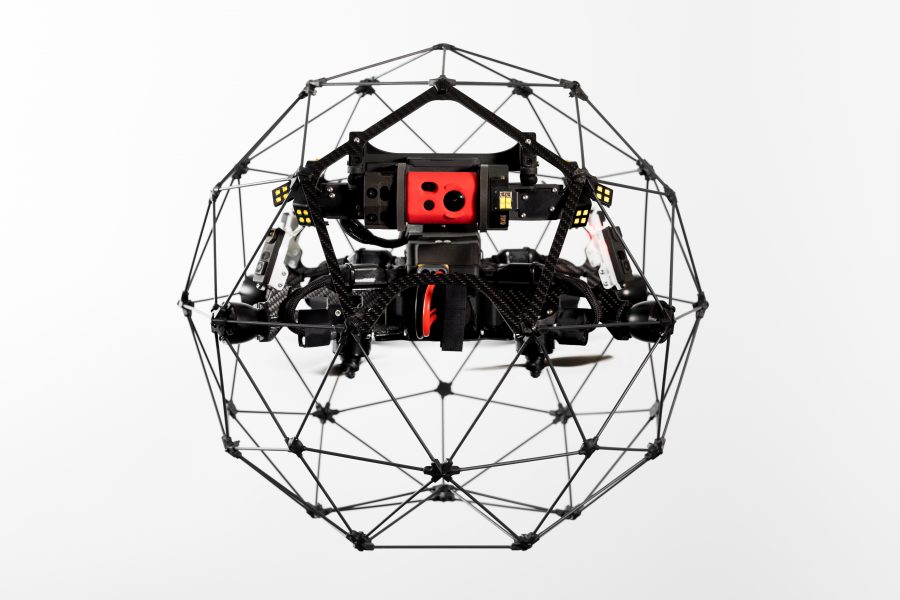
最初のプロトタイプドローン
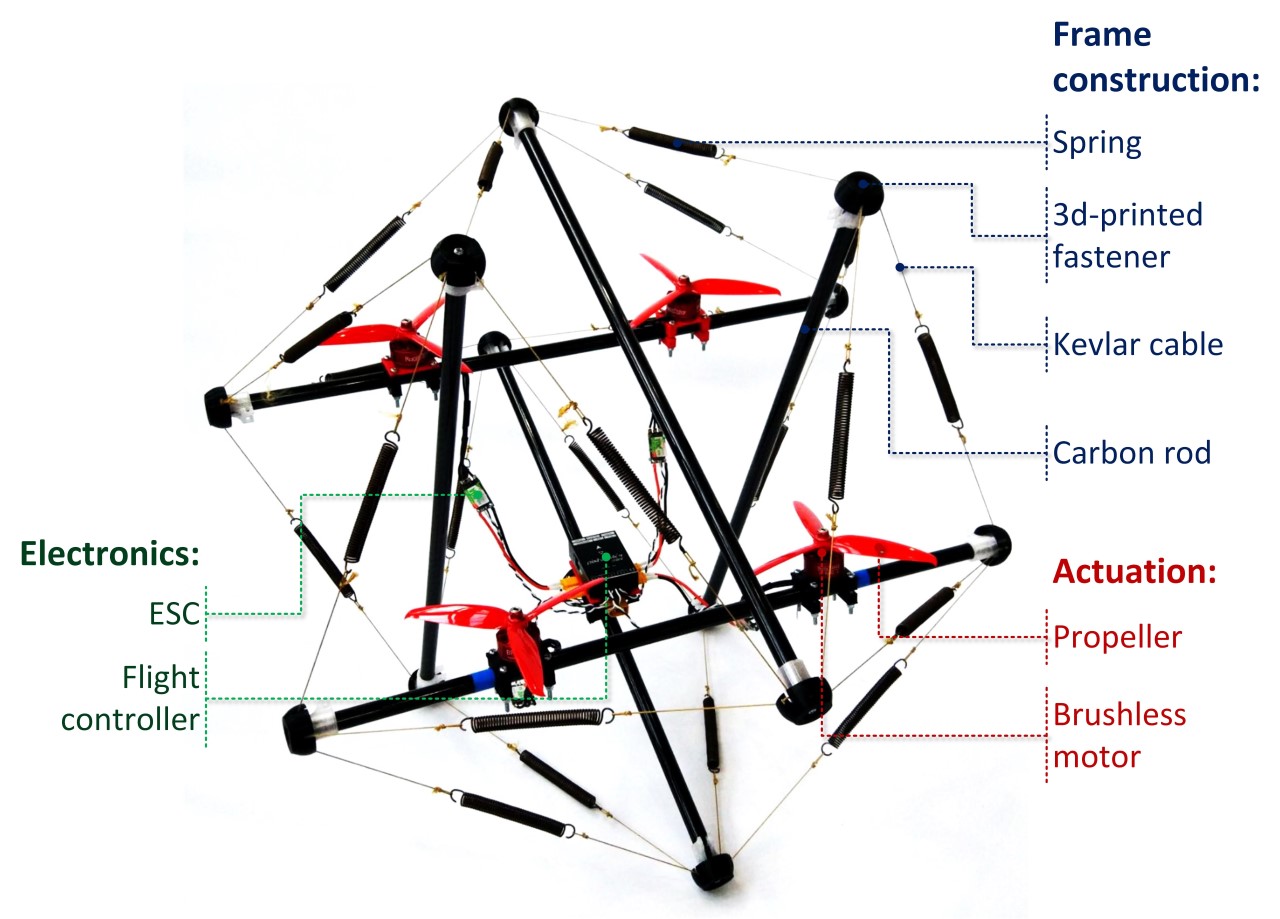
の設計は次のようになりました。イノポリス大学テンソドロン
のプロトタイプの設計テンセグリティの基本的な6ロッド設計が使用されました。リジッドクアッドコプターとは異なり、2対のプロペラモーターが異なるビームに取り付けられています。また、それらのいずれも、下部ビームに配置されている自動パイロットにしっかりと接続されていません。
ドローンプロトタイプのオンボードエレクトロニクスおよび電気機械コンポーネントには、次のものがあります。
- 自動パイロットCUAVPixhawk v5 mini;
- 3秒1400mAhバッテリー;
- Racerstar REV35 35A BLheliS 3-6SESCレギュレーター;
- Racerstar Racing Edition BR22052300KVモーター;
- IMUセンサーMPU9250。
ケーブルは、カスタムスプリング付きのケブラーファイバーで作られています。ロッドはカーボンファイバーチューブから作られています。エンドキャップやその他の小さな部品は3Dプリントされています。
管理上の問題
従来のハードドローンと比較した主な制御の問題は振動です。振動は、第一に振幅が大きく、第二に、コントローラーとエンジンによって異なります。それらは異なるビームに取り付けられます(ただし、これはプラスの振動絶縁にもなります)。
初期のジンバルテンソドロンテスト:振動(垂直ビデオで申し訳ありません)
飛行中のテンソドロンの初期テスト:振動
私たちは一人ではありません
, .
( ), , Imperial College London:
, : — .
.. , , , .
, , :
Hayden Cotgrove, Christopher Turner, Zachary Yamaoka Tensegrity Drones.
-, . -, — -, -, . , , .
. , Hayden Cotgrove, Christopher Turner, Zachary Yamaoka:
( ), , Imperial College London:
, : — .
.. , , , .
, , :
Hayden Cotgrove, Christopher Turner, Zachary Yamaoka Tensegrity Drones.
-, . -, — -, -, . , , .
. , Hayden Cotgrove, Christopher Turner, Zachary Yamaoka:
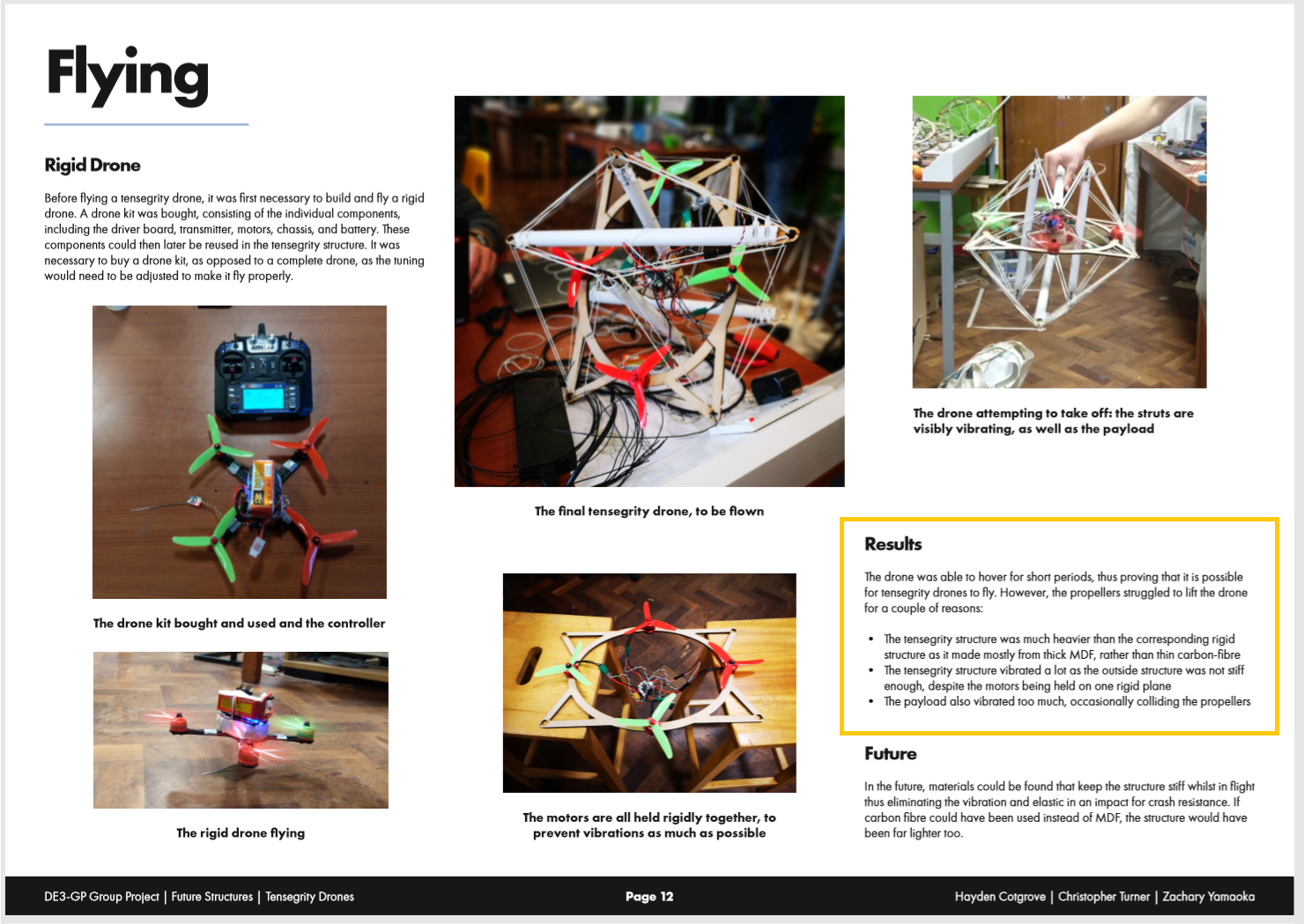
Results
The drone was able to hover for short periods, thus proving that it is possible for tensegrity drones to fly. However, the propellers struggled to lift the drone for a couple of reasons:
- The tensegrity structure was much heavier than the corresponding rigid structure as it made mostly from thick MDF, rather than thin carbon-fibre
- The tensegrity structure vibrated a lot as the outside structure was not stiff enough, despite the motors being held on one rigid plane
- The payload also vibrated too much, occasionally colliding the propellers
飛行中の振動を低減する設計を改善し、振動を抑制して制御を改善するための制御および状態推定アルゴリズムを開発することにより、これらの問題を2つの側面から解決します。これには、ビーム上のIMUセンサーからの追加データと張力構造の動的モデルを考慮することも含まれます。
床に落ちて離陸、屋内(設置なし)
さらにいくつかのテストビデオ
, , . , .. .
( )
( )
次は何ですか?
研究
まだまだ興味深いことがたくさんあり
応用
これで、これは特定のミッション(路上や屋内のGPSを含む-視覚的な走行距離測定を使用します)で単独で飛行します。私たちにとって、施設の検査のさらなる申請は明らかです。
低レベルの制御と形状を除いて、テンソドロンは通常のドローンです。自律的な探索と障害物の回避のために、モーションプランニングアルゴリズムを統合しています。
自動検査の実施例。ビクター・マサグ、私たちの卒業生、そして近い将来、できればバルセロナの従業員によるマスターのプロジェクト
そして再び研究
Tensegrityドローン設計の可能性は、単純なドローンよりもはるかに大きいです。 上
のビデオの折りたたみ式ドローンを覚えていますか?どのようなスーパーボールについて?
したがって、張力ドローンのロッドの長さやケーブルの張力を積極的に変更すると、その構成(またはより簡単に言えば形状)を制御できます!
折り畳み式のモーフィングテンソドロンが判明しました。この分野で積極的に研究を行っています。
イノポリス大学可変形状テンソドロン(コンセプト)

航空機にテンセグリティを使用すると、新たな研究課題が生まれます。設計プロトタイプは、アイデアが機能し、UAVを保護するために使用できることをすでに示しています。