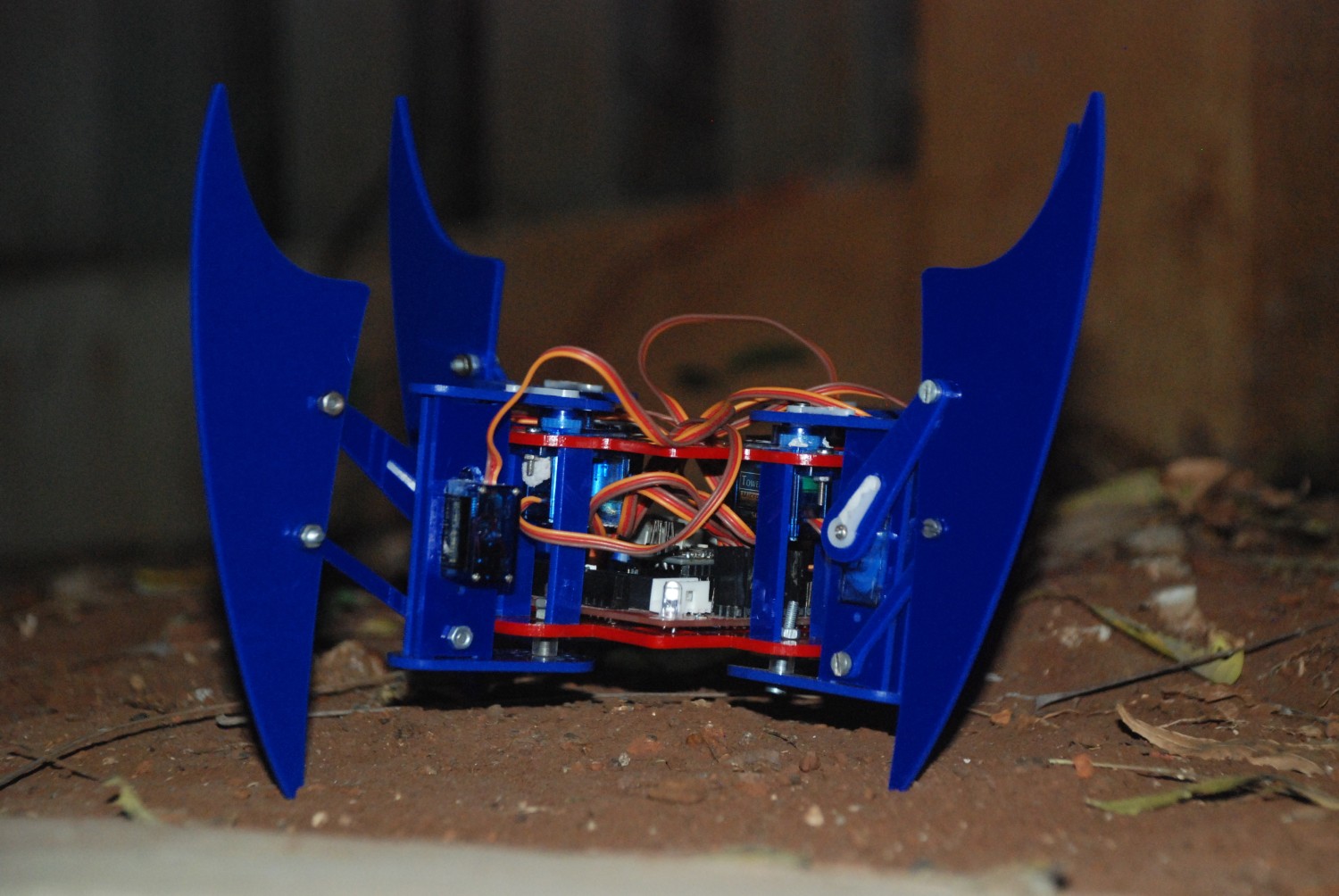
Milesは、Arduino Nanoベースのスパイダーロボットで、4本の脚を使用して歩行と操縦を行います。8 SG90 / MG90サーボモーターがレッグドライブとして使用されます。特別に作られたボードを使用すると、モーターとArduinoNanoを制御して電力を供給することができます。ボードには、IMUモジュール、Bluetooth、およびロボットの自律性を与える赤外線センサー用の特別なスロットがあります。本体はレーザーカッターでカットした厚さ2mmのプレキシガラスで組み立てられていますが、3Dプリンターで印刷することもできます。ロボット工学における逆運動学について学ぶ愛好家のための優れたプロジェクト。
mePedプロジェクト(www.meped.io)に触発され、それに基づくコードを使用します。


材料
コンポーネント:
- 料金(1)
- ボディアセンブリ用のマイルコンポーネント。
- SG90 / MG90サーボモーター(12)
- Aduino Nano(1)
- LM7805電圧レギュレーター(6)
- スイッチ(1)
- 0.33uF電解コンデンサ(2)
- 0.1uF電解コンデンサ(1)
- 3.08mm 2ピンフェニックスコネクタ(1)
- サーボモーター用のオスコネクタ。
オプション:
- 2ピンコネクタRelimate(1)
- 10ピンRelimateコネクタ(1)
- 4インチコネクタRelimate(1)
ステップ1:回路図と

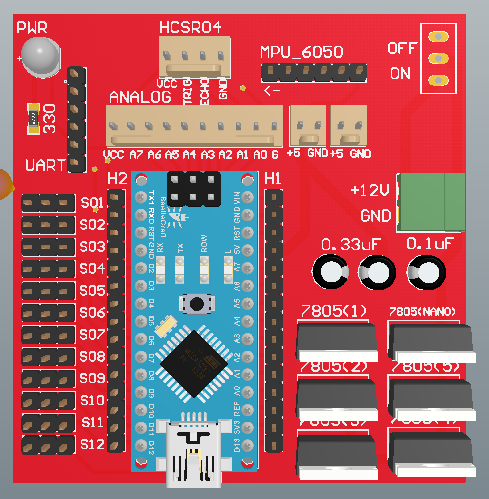

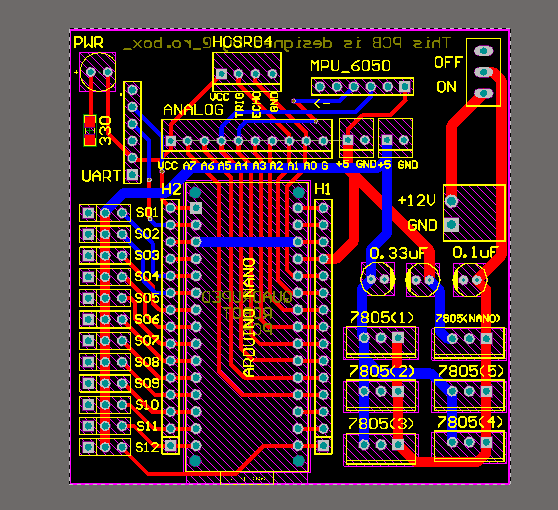
ボードの設計ボードをAltiumで設計します。12 SG90 / MG90サーボモーターは、同時に実行すると最大4〜5Aを消費する可能性があるため、回路は大電流を処理できる必要があります。モーターに電力を供給するために7805電圧レギュレーターを使用しましたが、それぞれが最大1 Aを供給できます。そこで、6つのLM7805を並列に接続し、使用可能な出力電流を増やしました。リンクから
スキームとGerberファイルをダウンロードします。 スキームの特徴:
- MPU6050 / 9250は、角度の測定に使用されます。
- 最大6Aの出力電流。
- サーボモーター用の絶縁電源。
- 超音波センサーHCsr04の出力。
- BluetoothとI2C用の周辺機器があります/
- Relimateには、センサーとアクチュエーター用のすべてのアナログ接点があります。
- 12個のサーボモーターからの出力。
- インジケーターLED。
ボードの特徴:
- 77×94mm。
- 2層FR4。
- 1.6mm。
ステップ2:コンポーネントをはんだ付けしてコードをロードする

コンポーネントが成長するにつれてはんだ付けし、表面実装デバイスから始めます。
私の回路には、TMP抵抗が1つしかありません。ArduinoとLM7805にメスのピンを追加して、必要に応じて交換できるようにします。オスピンをモーターコネクタにはんだ付けします。
この回路は、モーターとArduino用に別々の5V電源を使用します。すべての電源レール(Arduino 5V出力、VCCモーター出力、および12Vフェニックス入力)のアース短絡を確認します。
ボードを確認した後、Arduinoをプログラムできます。テストコードをGithubに投稿しました。それを埋めて、ロボットを組み立てます。
ステップ3:ケースを組み立てる

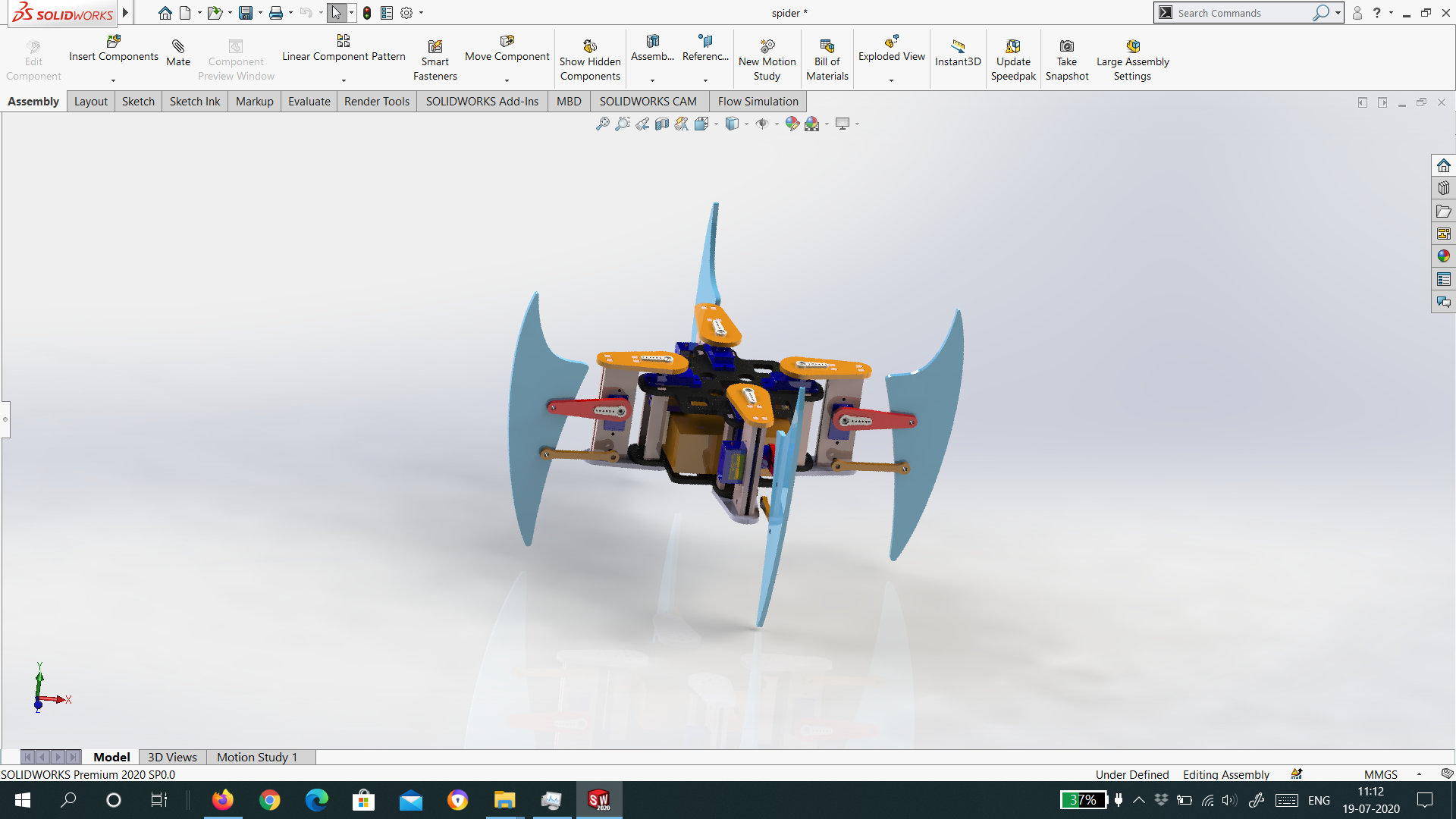
ロボットは合計26個の部品で構成されており、3Dプリンターで印刷したり、2mmのプレキシガラスから切り取ったりすることができます。ロボットをスパイダーマンのように見せるために、2mmの赤と青のプレキシガラスシートを使用しました。
ボルトとナットM2とM3を使用して固定できる本体にはいくつかの接続があります。サーボモーターはM2ボルトで固定されています。カバーをねじ込む前に、バッテリーとボードを取り付けてください。
必要なファイルをGithubにアップロードしました。
ステップ4:接続してテストする
次の順序で接続します。
- 左前回転モーター。
- フロント左リフトモーター。
- リア左スイングモーター。
- 後部左リフトモーター。
- 右後回転モーター。
- 右後部リフトモーター。
- フロント右スイングモーター。
- フロント右リフトモーター。
スイッチをスライドさせてロボットを起動します。
ステップ5:将来の改善
逆運動学
現在のコードは位置的アプローチを使用しています-特定の動きを実行するためにモーターが回転しなければならない角度を設定します。インバースキネマティクスは、ロボットにさらに洗練された歩行を提供します。
Bluetooth制御
ボード上のUARTコネクタを使用すると、HC-05などのBluetoothモジュールを接続して、スマートフォンからワイヤレスでロボットを制御できます。