YaKurierのある部門の小さな開発チームである私たちは、急速に発展する無人技術の分野に貢献したいと考えていました。実験用にプリウスを購入しましたが、少し周辺的なもので、ドライバーの注意を模倣して、インテリジェントシステムに焦点を当てた独自のトリックを考案しました。私たちは始めました。そして、インテリジェントコンピュータビジョンシステム自体と、それとともに、新規性の検出を保証する「サブインテリジェント」システム、つまり、この非常に注目されているシステムについてはどうでしょうか。
TensorFlowまたは同様のもの-既製ですか?いくつかの実験により、入力配列の再配置、多くのサブタスク、認識されたデータの多くのクラスの明らかな不確実性、開発中のシステムの必然的なスケーラビリティ、独自の作成者の畳み込みとレイヤーを追加したいという動的な多因子の場合、オプションは「既製」であり、奇妙なことに、最初のステップでの間違いによる汗、血、予算、欲求不満が必要であり、それはすべてを台無しにし、もはや修正することはできません(迷惑なクラッチを除く)。そして、私たちはかなり素朴なチームなので、独自の方法でプレーすることにしました。ポイントはTensorFlowではなく、TensorFlowが実装するテクノロジーにあるという意見があり、何かを単純化し、改善し、完全に変更することができます。
最初に分類とパターン認識へのアプローチについて話しましょう。あなたはそれらについてすべて知っていると確信していますが、アイライナーなしでどこに行くことができますか。厳密な数学的言語で話すのではなく、より人間的な抽象化と視覚化に固執し、従来のきゅうりとトマトを認識する抽象的な事例を取り上げます。
分類とパターン認識
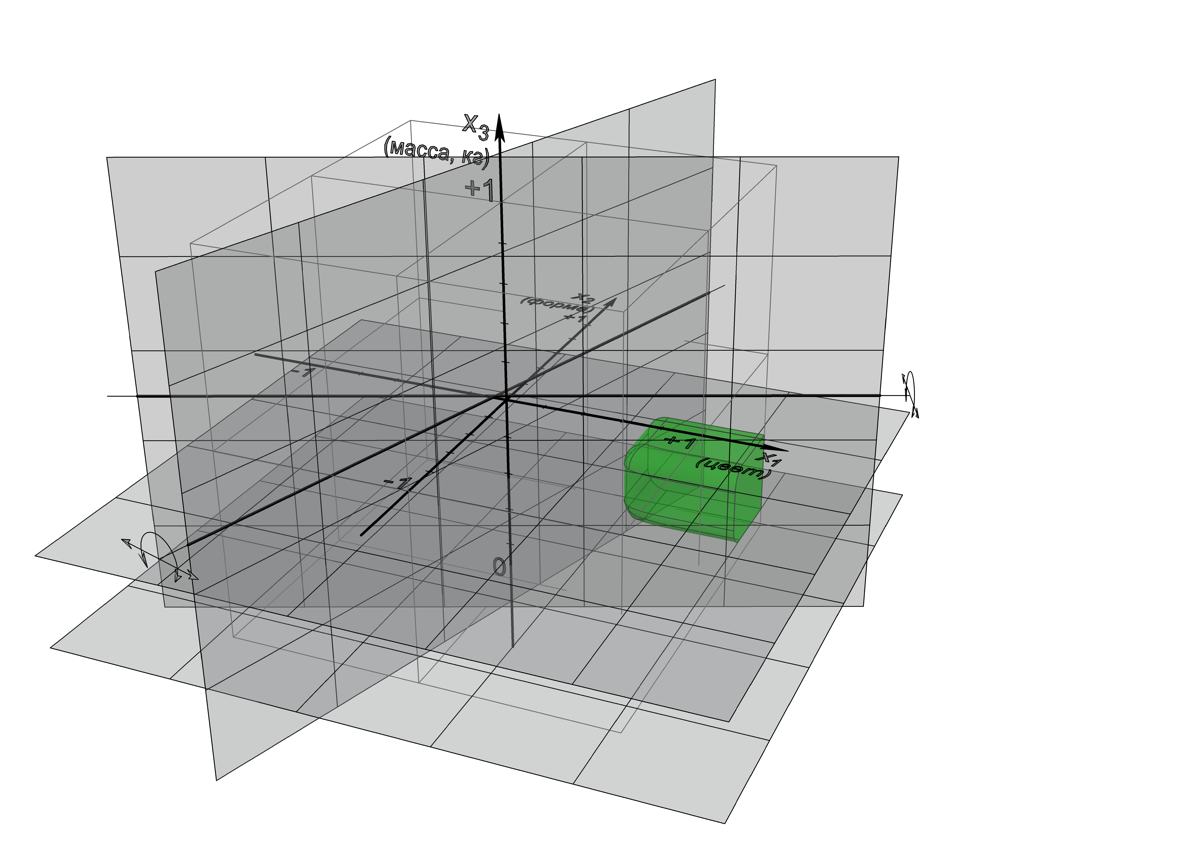
実験対象の兆候を抽出する方法を明示的に省略し、色(赤から黄色、緑)と形状の楕円度(軸の比率)の2つを測定する方法を素晴らしく知っている場合を考えてみましょう。 「測る」と言うことで、どのエンジニアも記号/現象/値を数字と明確に関連付けることができることを意味しますが、2つあり、それらは完全に独立しているため、つまり色は形状を示すことができないため、長方形の座標系を描くことができます色x_1と形状x_2に対応する、その中の点またはベクトルについて話します。
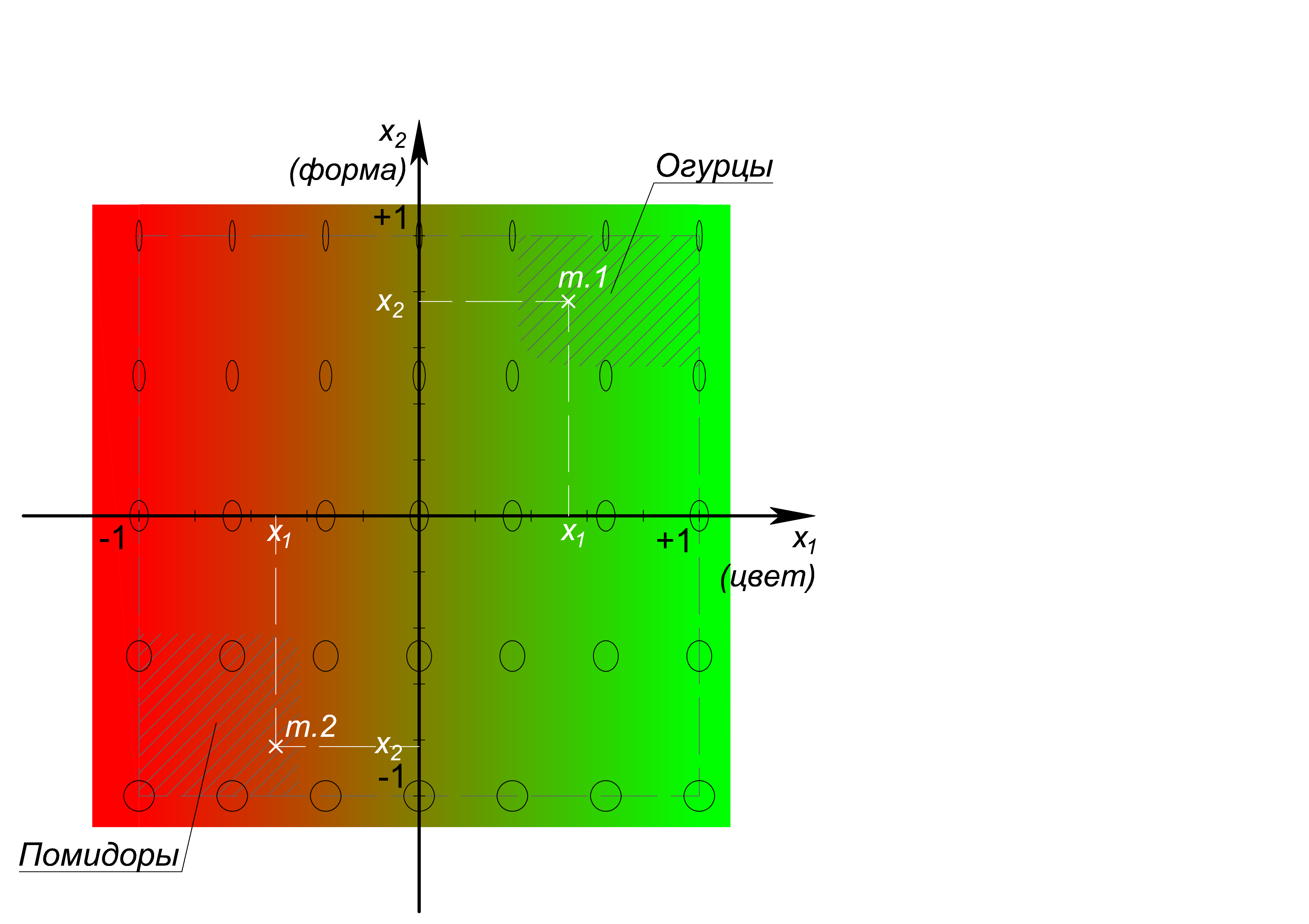
, , x_1: (-1), (+1); x_2: (-1), () 1/5 (+1). – , – , . , , , , , 1 {(x_1=0,53@x_2=0,77)} – , 2 {(x_1=-0,51@x_2=-0,82)} – .
, , – – 2 . , , , -, , -, , , , , , , 900 (3030 px) , 900- . , , , (, ).
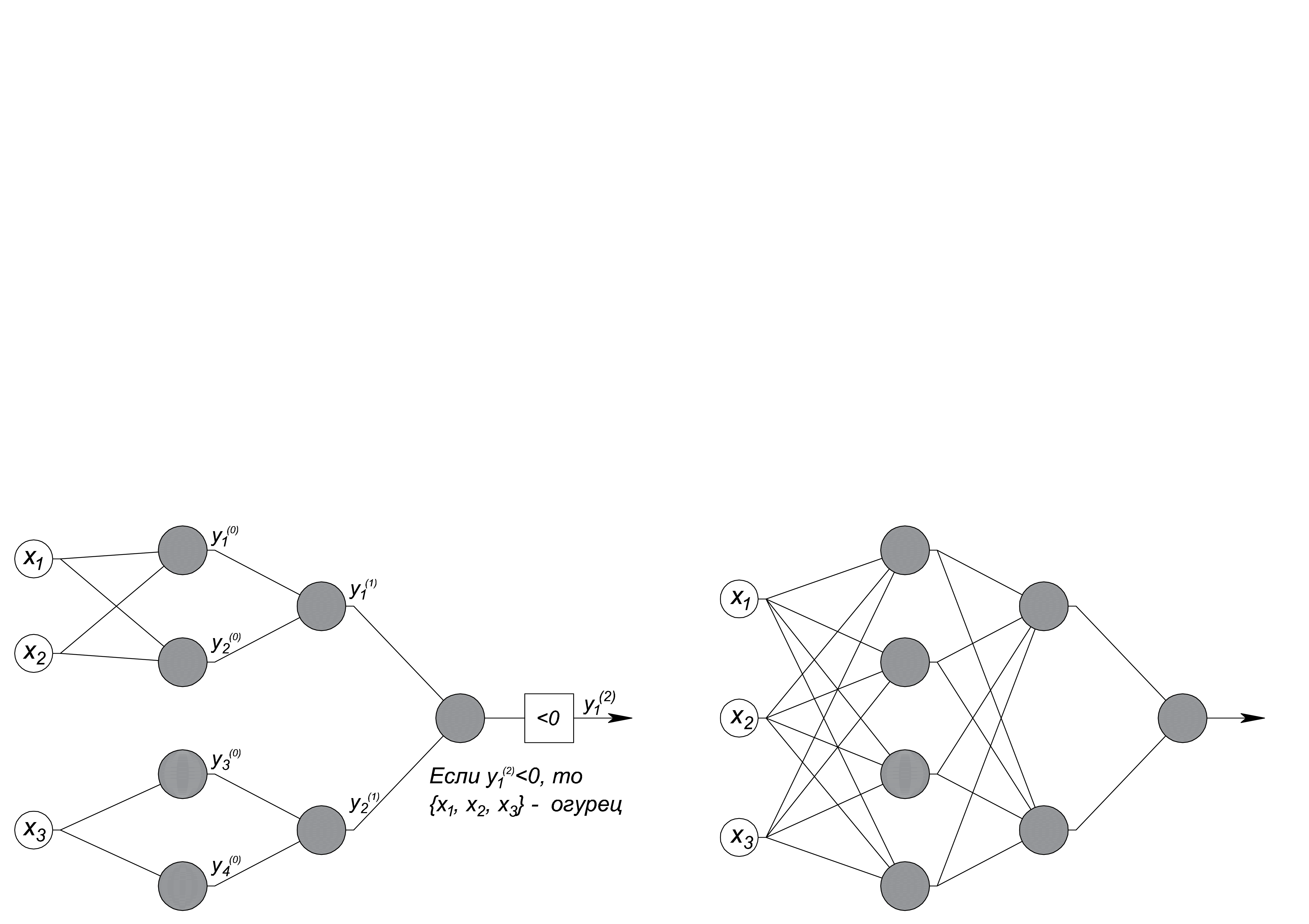
? , . , , , - ? , , . , . , , : , , , , , :
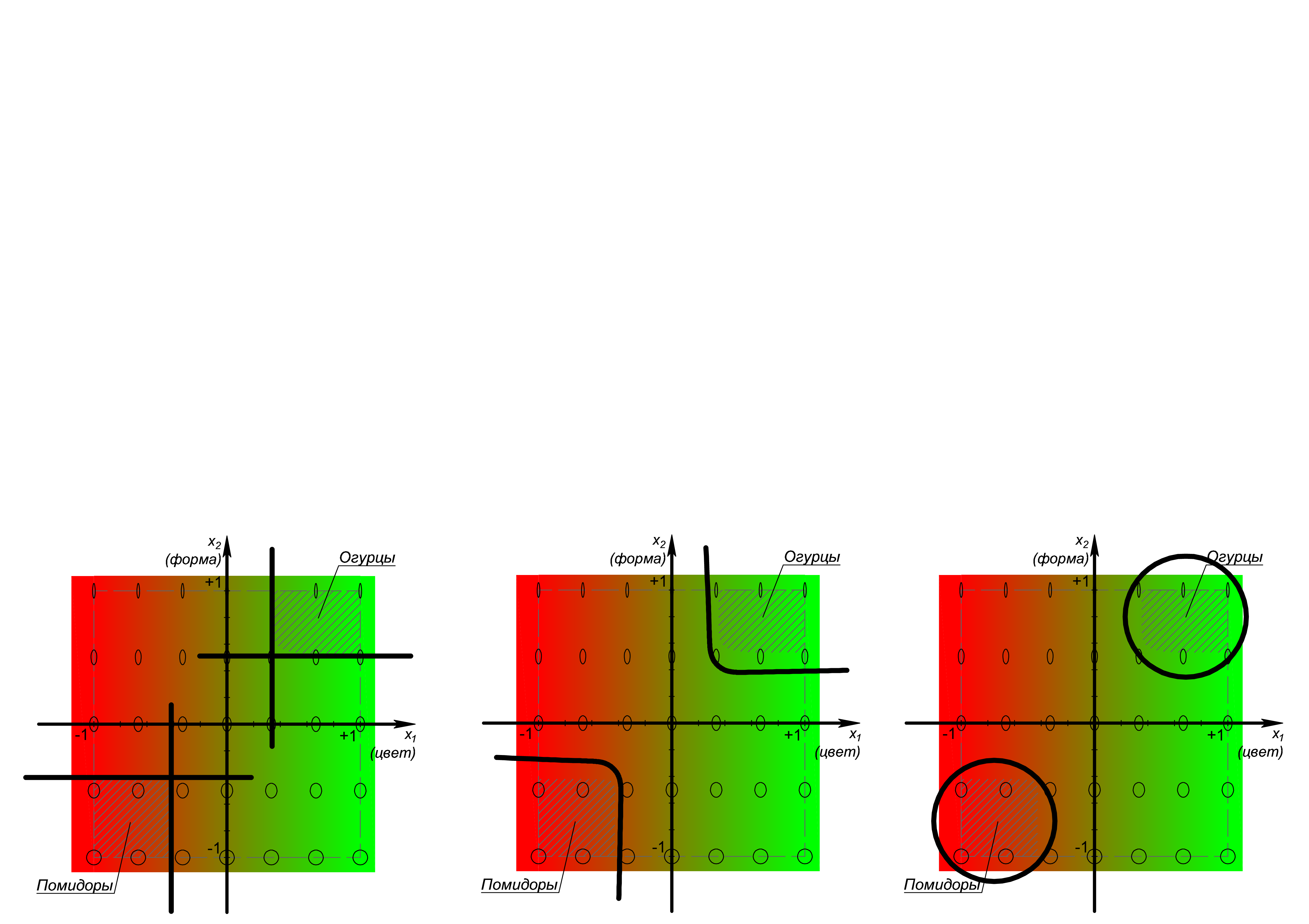
, 4- , .. N- .
II-
, , . , , , . :
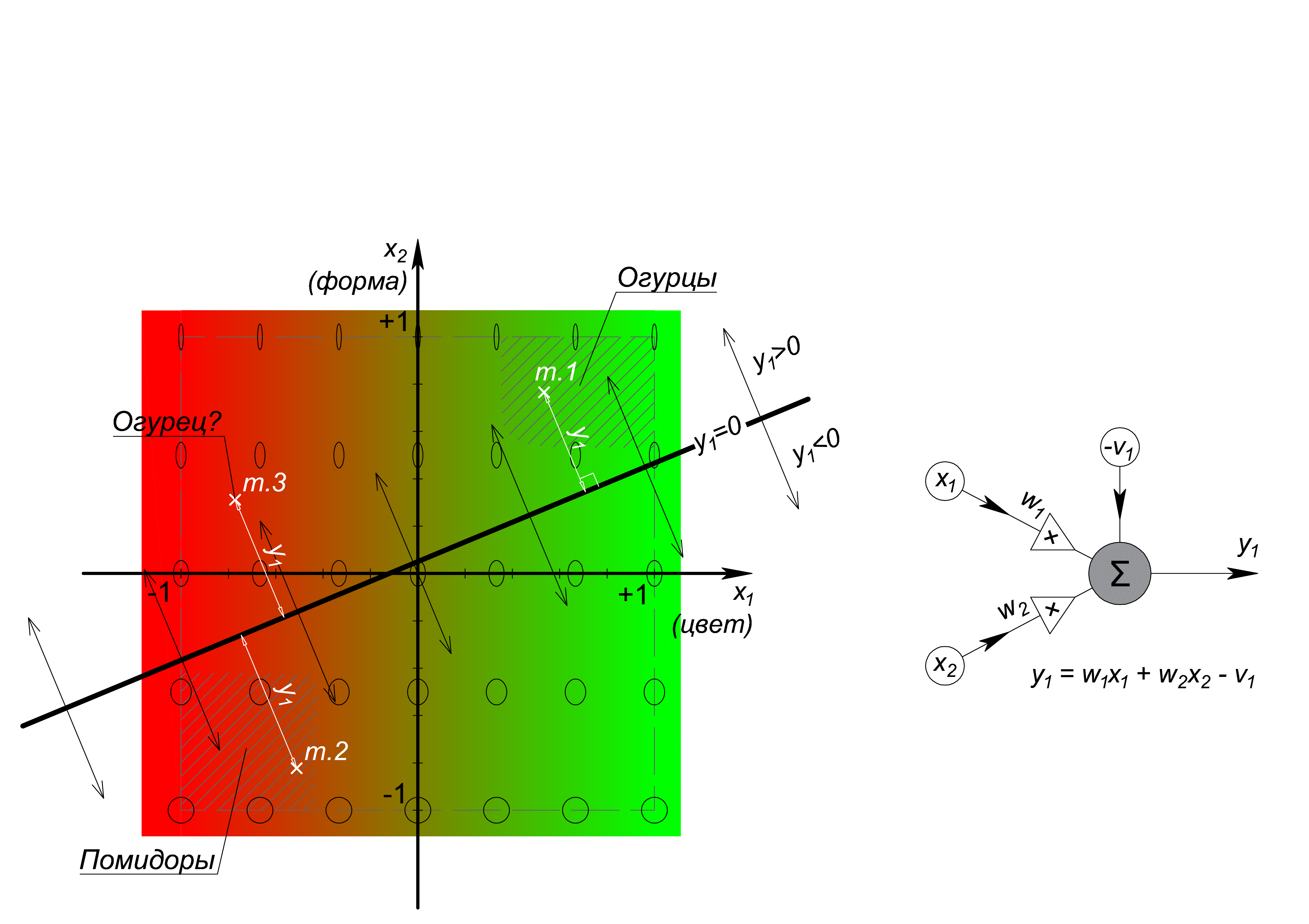
: Ax+By+C=0, A, B C w_1, w_2 -v_1, {x;y} {x_1;x_2 }. , N- – N-1. 0, () , , – « », – « », () – . «», «» «- » , - , (. ). . , , . .
0, «» « », «», «» « » « » 1- .
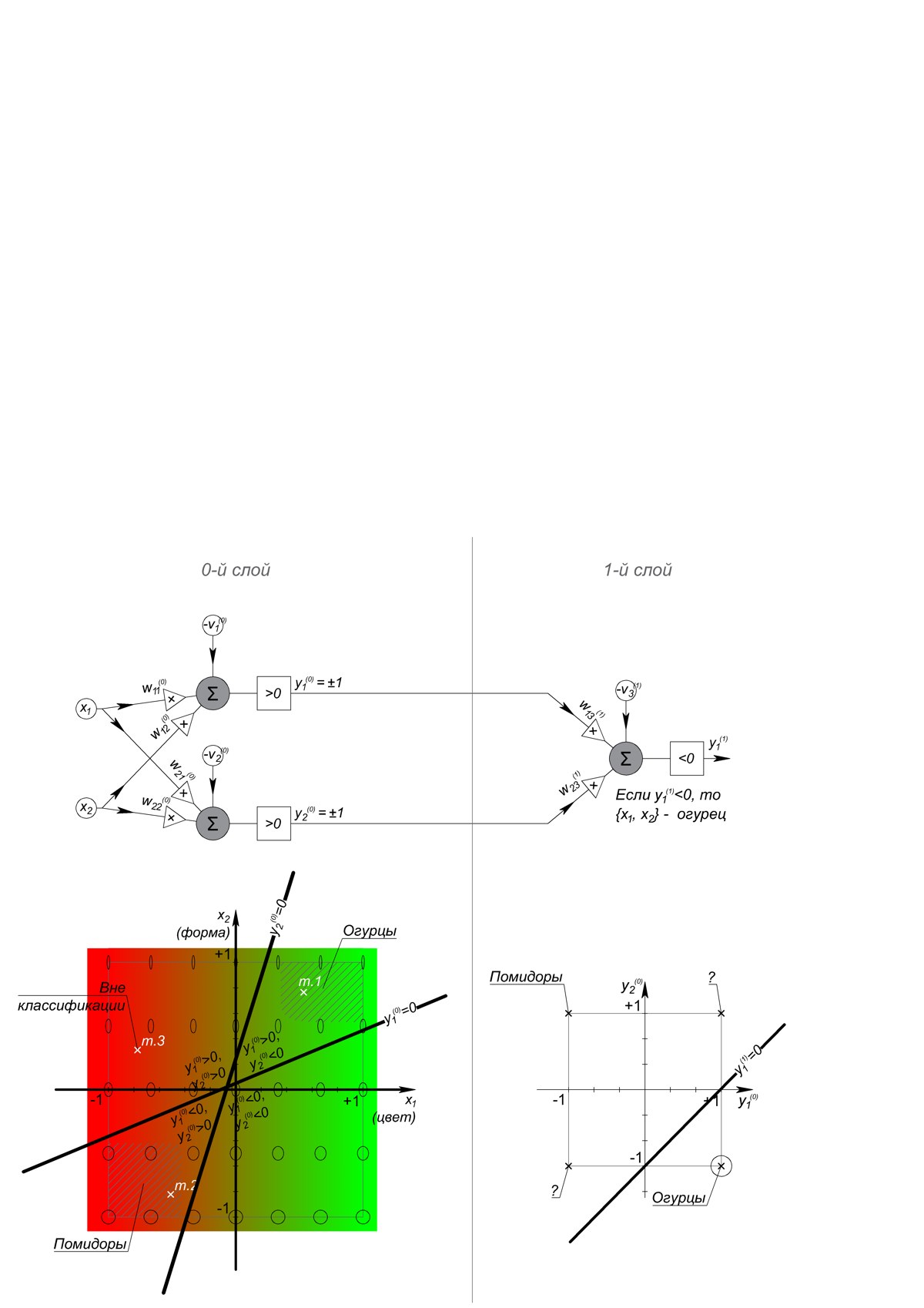
w (k)/j, , N- – . , , , . , 0 1 .
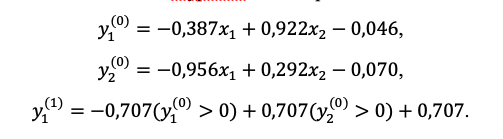
– , ( , – ):
– , , ( ), Ax2+By2+Cxy+Dx+Ey+F=0, . - , , ( , ). , / , , . .
, - . – , , , – , – . : S-, A-, R- . , , MNIST, : , , :
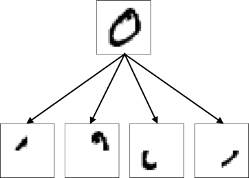
/ …
! , 1- :

. . -, , , , , (cost function) , , , . , - , «» , , , , , , , , , , , , – ( – , – ):
-, , , , , - , . , , , , , . . . 2-- - :
? , x_1: – (-1), – (+1); x_2: – (-1), 1/5 – (+1). , 2- - , , 900- ? , 1- , – . , . , II- – , , .
. , , , , . . , , .
, , , , .
, , , , : , , , / , , . , , , , , , , , , , - .
. ? -, , , -, , , , . , , . , , , – .
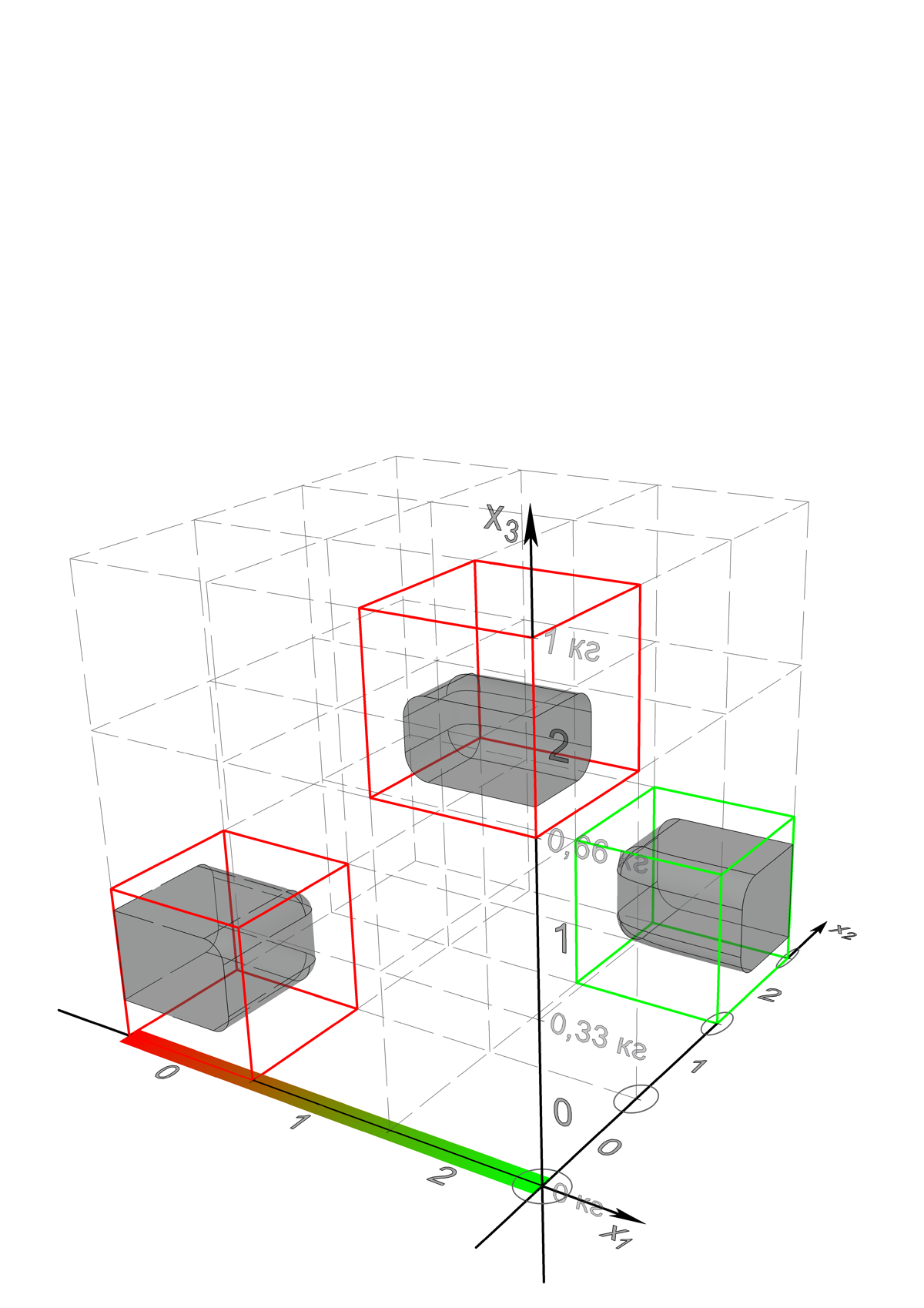
? {0;0;0} {2;0;2} , {2;2;0} – . , , . , , , , , , , .. , . , , , , , , , , .
. , , , , , , , , .
:
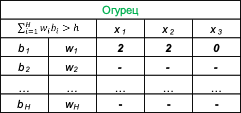
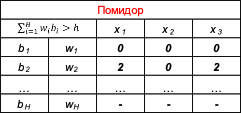
w_i – , b_i – , . h. , /, , – .
? , , , , , – . . , , , , , GPU CUDA.
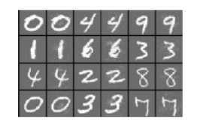
MNIST, 28x28 px. 10 10 , , – . , , .
, , , , , 30÷60 .
, , , . – MNIST, – , – .
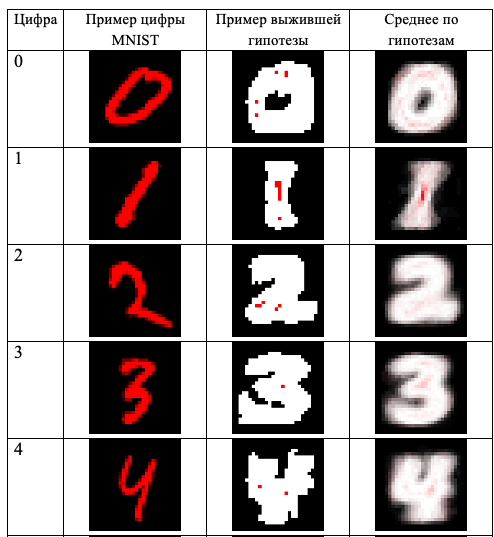
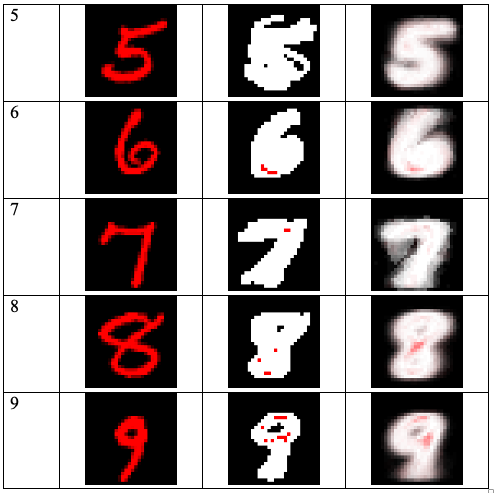
, , . , , .
« » .
( « »), , « » « ». , , , , «».
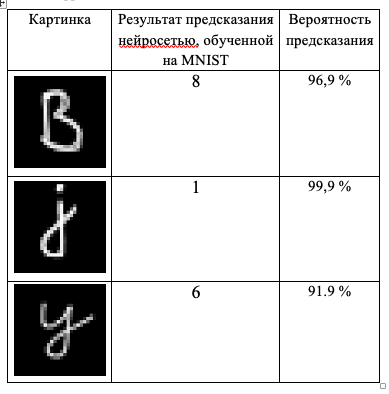
, , , (), , , ( , ). , TensorFlow 2- , , MNIST 2,6%, . , .
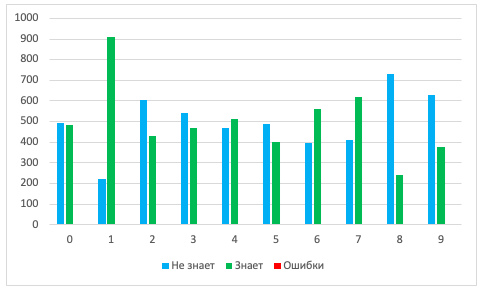
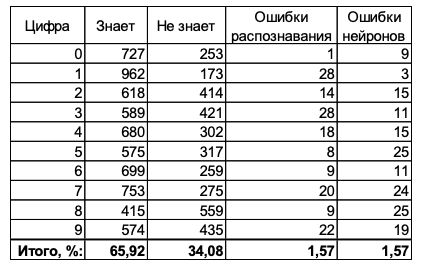
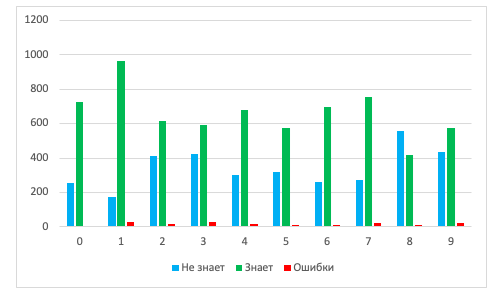
MNIST (10 000 ) « ».
, + 25%:

:
:
- ;
- , , , .
:
- , , , , ;
- ;
- , , ;
- .
, , , , , .
うーん、冒頭で述べた無人技術はそれと何の関係があるのでしょうか?私たちのインテリジェントネットワークがその主な用途を見つけ、環境の認識と認識における多様性、変動性、不均一性に関連する既存の障壁を克服できるようになるのは、この分野であると確信しています。