一部のアトラクタは、静止画でもその美しさに魅了されます。私たちは、ほとんどのアトラクタをダイナミクス、3D、ラグなしで視覚化できるアプリケーションを作りたかったのです。
私たちに関しては
私たちはRomanVenediktov、Vladislav Nosivskoy、KirillKarnaukhovです。サンクトペテルブルクの高等経済学部の学士課程「応用数学と情報学」の2年生です。私たちは学生時代からプログラミングが好きでした。3人全員がオリンピックプログラミングに従事し、異なる年にコンピュータサイエンスの学童のための全ロシアオリンピックの最終段階に移行しましたが、彼らは以前に産業プログラミングの経験がなく、これは私たちにとって最初の大規模なチームプロジェクトです。C ++に関するタームペーパーとして擁護しました。
モデリング
奇妙なアトラクタを使用して動的システムを定義する方法はたくさんありますが、最も一般的なのは3つの1次微分方程式のシステムです。私たちは彼女から始めました。
何かを視覚化する前に、プロセス自体をシミュレートし、ポイントの軌道を見つける必要があります。正確なモデリング方法は非常に手間がかかるため、できるだけ早く実行したいと考えています。
モデリングを実装する際に、メタプログラミングを使用し、std ::関数や他の同様のメカニズムを放棄することにしました。アーキテクチャとコーディングを簡素化することもできますが、パフォーマンスが大幅に低下するため、望ましくありませんでした。
最初は、一定のステップで4次の精度の最も単純なRunge-Kuttaメソッドがモデリングに使用されました。これまでのところ、モデルのメソッドやその他の数学コンポーネントの数を増やすことに戻っていません。現在、これが提示されている唯一のメソッドです。見つかったほとんどのシステムでは、他のソースからの画像と同様の画像を生成するのに十分な精度があります。
モデルは入力として受け入れます:
- ポイントの座標によって導関数を取得するための「導関数」関数。
- 「オブザーバー」ファンクター。受信するとすぐにそのポイントから呼び出されます。
- シミュレーションパラメータ(開始点、ステップサイズ、点数)。
将来的には、提示された画像が実際の画像とどのように一致するかを確認するためのチェック、モデリングのより強力な方法(Boost.Numeric.Odeintライブラリを接続するなど)、および数学の知識がまだ十分でないその他の分析方法を追加できます。
システム
私たちは、それらから最高のパフォーマンスを引き出すために最も人気のある奇妙なアトラクタシステムを見つけました。ここでは、この検索を非常に簡単にしたサイトchaoticatmospheres.comに感謝します。
すべてのシステムは、すべて「テンプレート」であるにもかかわらず、コンテナに入れてコントローラで正常に動作できるように、ラップする必要がありました。次の解決策に到達しました。
- DynamicSystem ‘observer’, (, ...) std::function ‘compute’. ‘Compute’ , , ‘derivatives’ .
- std::function , DynamicSystemInternal compute .
- DynamicSystemInternal ‘observer’, ‘derivatives’. ‘derivatives’, .
DynamicSystemを所有し、視覚化に必要な前処理(正規化のための定数の選択、ステップ長制御を使用するメソッドの許容可能なエラーなど)を実行できるDynamicSystemWrapperの追加作業を開始しましたが、終了する時間がありませんでした。
視覚化
パフォーマンスと機能のためにレンダリングライブラリとしてOpenGLを選択しました。また、OpenGLの便利なラッパーを持つQt5も選択しました。
まず、少なくとも何かを描く方法を学びたかったのですが、しばらくして最初のキューブを作ることができました。その後まもなく、数学モデルの単純なバージョンが登場しました。これがアトラクタの最初の視覚化です。
視覚化の最初のバージョンでは、非常にシンプルなバージョンのカメラも用意されていました。彼女は一点を中心に回転し、近づく/離れる方法を知っていました。私たちは宇宙でもっと自由を望んでいました。アトラクタは異なり、さまざまな方法で探索する必要があります。次に、カメラの2番目のバージョンが登場しました。これは、すべての方向に自由に回転および移動できます(Minecraftのカメラによってガイドされました)。当時、線形代数は始まったばかりだったため、十分な知識がありませんでした。インターネットで多くの情報を探す必要がありました。
この間ずっと、写真は白く、静的で、面白くありませんでした。色とダイナミクスを追加したかった。最初に、全体像を1つの色でペイントする方法を学びましたが、それも面白くないことがわかりました。次に、次の解決策を考え出しました。
- 互いに近い開始点をたくさん(100〜500、設定でさらに選択できます。主なことは十分なパフォーマンスがあることです)。
- それらのそれぞれからの軌道をシミュレートします。
- 軌道を異なる色で色付けしながら同時にレンダリングし、軌道のセグメントのみを表示します。
その結果、次のことが判明しました。
ほぼこのスキームは最後まで残っていました。
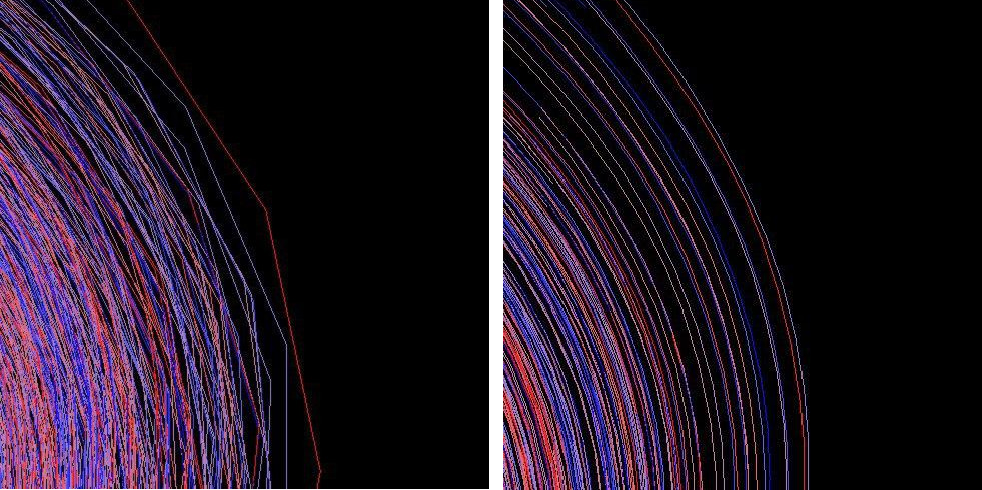
線が「角張っている」ことに気づき、滑らかにする方法を学ぶことにしました。もちろん、シミュレーションのステップを減らすように努めましたが、残念ながら、最新のプロセッサでさえ、そのような数のポイントをカウントすることはできません。別のオプションを探す必要がありました。
最初は、OpenGLにはアンチエイリアシングツールが必要だと考えていましたが、多くの検索を行った結果、そうではないことがわかりました。次に、曲線を補間し、十分に離れている隣接するポイントの各ペアの間にさらにいくつかを追加するというアイデアが思い浮かびました。これを行うには、曲線を補間する方法を選択する必要があり、そのような方法はたくさんあります。残念ながら、それらのほとんど(たとえば、ベジエ曲線)では、さらにいくつかのポイントを指定する必要がありましたが、これは明らかに私たちのタスクには適していませんでした。しばらくして、適切な補間を見つけました:Catmull-Roma曲線。それは次のようになりました:
その後、アプリ内で動画を録画するといいと思いました。クロスプラットフォームを維持したかったので、libavライブラリに決めました(ライブラリ間でほとんど選択の余地はありませんでした)。残念ながら、ライブラリ全体がCで記述されており、インターフェイスが非常に不便であるため、何かの記述方法を学ぶのに長い時間がかかりました。以降のすべてのgifは、組み込みの記録を使用して作成されます。
これまで、すべての曲線の色は作成時に明示的に指定されていました。美しい写真を撮るには、色を変える必要があると判断しました。これを行うために、コントロールカラーのみが表示され始め、残りは線形勾配を使用して計算されました。この部分はシェーダーに移されました(以前は標準でした)。
それぞれが頭から尾へと色を変えるような方法で軌道に色を付けるのは興味深いことでした。これにより、速度の影響を観察できます。
次に、軌道の前処理時間を短縮する価値があると考えました。曲線の補間は「高価な」操作です。軌道の一部を描画するように要求されるたびにGPUが補間を計算するように、この部分をシェーダーに転送することが決定されました。このために、GeometryShaderを使用しました。このソリューションには多くの利点があります。描画前のレンダリング側での遅延がなく、曲線をさらに滑らかにする機能(このような計算はCPUよりもGPUで高速に実行されます)、使用するRAMが少なくなります(その前は、すべての補間ポイントを保存する必要がありましたが、今は-いいえ)。
コントローラとユーザーインターフェイス
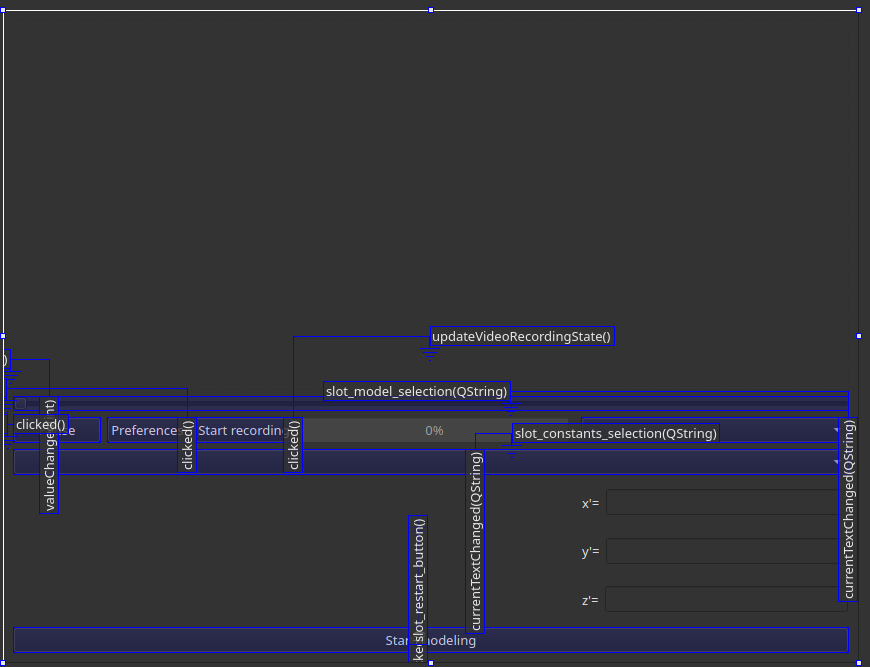
基本フレームワークとしてQt5を選択した後、インターフェースのテクノロジーを選択するという問題はすぐに消えました。組み込みのQtCreatorは、小さなアプリケーションのすべてのニーズを十分に満たします。
ユーザーの要求に応答するには、コントローラーを作成する必要がありました。幸い、Qtには、キーストロークを処理してフィールドに値を入力するための便利な方法があります。これは、Qtの主なアイデアである信号とスロットのメカニズムを使用しています。たとえば、アプリケーションでモデルの再構築を担当するボタンを押すと、ハンドラスロットによって受け入れられる信号が生成されます。再構築自体が開始されます。
インターフェイスを備えたほとんどすべてのアプリケーションを開発するとき、遅かれ早かれ、アプリケーションをマルチスレッドにするというアイデアが浮かび上がります。組み込みモデルの構築には数秒かかり、カスタムモデルの構築には10秒かかりました。同時に、もちろん、すべての計算が1つのスレッドで実行されたため、インターフェイスがハングしました。かなり長い間、さまざまなオプションについて話し合い、std :: asyncを使用して非同期について考えましたが、最終的には、別のスレッドで計算を中断できるようにしたいと考えました。これを行うには、std :: threadのラッパーを作成する必要がありました。すべてが可能な限り単純です。チェック用のアトミックフラグと、チェックが失敗した場合の適切な割り込みです。
これにより、望ましい結果が得られただけでなく、インターフェイスがハングしなくなりました。また、アーキテクチャの特殊性とモデルデータと視覚化の間の相互作用により、カウントの過程ですべてをオンラインで描画できるようになりました。以前は、すべてのデータを待つ必要がありました。
カスタムシステム
アプリケーションにはすでに多くのアトラクタが用意されていますが、ユーザーが自分で方程式を入力できるようにしたかったのです。このために、変数(x、y、z)、標準の数学演算(+-* / ^)、定数、多くの数学関数(sin、cos、log、atan、sinh、expなど)をサポートするパーサーを作成しました。とブラケット。これがその仕組みです:
- 元のクエリ文字列はトークン化されます。次に、トークンが左から右に解析され、式ツリーが構築されます。
- 可能な操作はグループに分けられます。各グループには独自のノードがあります。グループ:プラスマイナス、乗算除算、指数、単項マイナス、いわゆるシート(これには定数、変数、関数呼び出しが含まれます)。
- 各グループには、独自のレベルの計算があります。各レベルは、次のレベルで再帰的な計算を引き起こします。呼び出しの順序が操作の優先順位の分布に影響を与えることがわかります。上記の順番でご用意しております。
パーサーのソースコードで 詳細を探してください。
各レベルは、ノードのある種の継承者を返します。それらの4つがあります:
- バイナリ演算子-2つの子へのポインタと独自のタイプの操作を格納します。
- unary演算子-子へのポインタとそれ自体の操作タイプを格納します。これは、単一操作の特殊なケースであるため、関数が含まれます。
- 定数-その値を格納します。
- variable-値が存在するメモリ内の場所へのポインタを格納します。
ノード構造には、そのサブツリーの値を返す仮想計算関数のみがあります。
結果の出力は、前述のシステムアーキテクチャに合わせて非常に便利に調整されます。ラムダは単にDynamicSystemInternalに渡され、取得された3つのツリーのルートノードへのポインターと値のxyzメモリ位置が格納されます。呼び出されると、そこにある値を提供された値に変更し、ルート頂点からcalcを呼び出します。
結果
その結果、ユーザー定義のシステムを視覚化でき、多数のアトラクタを基盤とするプログラムを手に入れました。彼女はそれを非常にうまく行い、最適化しています。これは朗報です。
しかし、まだ多くの作業があります。
- より正確なメソッドを追加します。
- システム処理のレイヤーをもう1つ追加します(より複雑な方法での正規化と自動エラー選択)。
- ユーザーシステムでの作業を改善します(変数のサポート、保存)。
- 作業を最適化します(JITコンパイル、または保存されたシステムをc ++コードに変換し、組み込みシステムのパフォーマンスを実現するために再コンパイルを開始するユーティリティ)。
- そのようなシステムで作業する人々が本当に必要とする結果分析または視覚化のための機能を追加します。
- ..。
私たちのリポジトリ。
そして、アトラクタを備えたいくつかのビデオ: