フォトポリマーLCD3Dプリンター用の独自のファームウェアの作成に関する記事の続き。
このパートでは、プロジェクトの段階について引き続き説明し
ます。2.USBフラッシュドライブとその上のファイルの操作
3.プラットフォームを移動するためのステッパーモーターの制御。
-パート1: 1。ユーザーインターフェイス。
-パート2: 2.USBフラッシュドライブ上のファイルシステムの操作。3.プラットフォーム移動用のステッパーモーター制御。
-パート3: 4。バックライトディスプレイにレイヤーの画像を表示する。5.照明とファンの制御、設定の読み込みと保存など、あらゆる小さなこと。6.快適さと便利さのための追加機能。
2.USBフラッシュドライブとその上のファイルの操作
私はこれまでマイクロプロセッサでUSBホストを使用したことがありません。 USBデバイスとして-CDCクラス(COMポートエミュレーション)とHIDクラスの両方でファームウェアを作成しましたが、ホストでは機能しませんでした。したがって、プロセスを高速化するために、このペリフェラルのすべての初期化をSTM32CUBEで作成しました。その結果、大容量ストレージデバイスをサポートするUSBFSモードで動作するホストを取得しました。同じキューブで、すぐにFatFSライブラリを接続して、ファイルシステムとファイルを操作しました。次に、結果のソースをプロジェクトにコピーして、それらを操作する方法を理解する必要がありました。それは簡単であることが判明し、ここで説明することはあまりありません。 Cubaのusb_host.cファイルには、ApplicationTypeDefタイプのグローバル変数Appli_stateがあります。
typedef enum {
APPLICATION_IDLE = 0,
APPLICATION_START,
APPLICATION_READY,
APPLICATION_DISCONNECT
}ApplicationTypeDef;
この変数は、USBホストペリフェラルのさまざまなイベント(割り込み中)で、リストされた状態の1つを取り、ホストの現在の状態を示すことができます。プログラムのメインループでは、この変数の変更を追跡し、それに応じて反応するだけです。たとえば、その値がAPPLICATION_READYに変更された場合、フラッシュドライブまたはカードリーダーが接続され、正常に初期化され、それらからファイルを読み取ることができます。
FatFSにも問題はありません。Cubeはすでに完全に構成してUSBホストに「接続」しているため、フラッシュドライブを接続した直後に、このライブラリの機能にアクセスしてファイルを操作できます。確かに、新しく更新されたキューブには古いバージョンのライブラリが含まれています。ファイルを新しいバージョンに更新した後、キューバのソースコードのいくつかの場所でFatFS構成から定義の名前を修正する必要がありました。それらは新しいバージョンで変更されました。しかし、アップデートは特に問題を引き起こさず、すべてが迅速かつ簡単に行われました。
しかし、FatFSがファイルとディレクトリの名前でCyrillicと連携するためには、少しいじくり回さなければなりませんでした。 FatFSがCyrillic名を正しく読み取るためには、構成でUnicodeを有効にする必要があります。その後、FatFSに関連付けられたすべての文字列は、ディスク名、ファイル名など、このエンコーディングのみである必要があります。同時に、IDEとFatFSのテキストエディタは、上位バイトの位置が異なるUnicodeをサポートします。1つはLittle Endianで、もう1つはBig Endianであるため、Unicodeテキストでソースを単純に書き込むことはできません。そして、正直に言うと、私はしたくありません。そのとき、ANSIとUTF-8からUnicodeに、またはその逆にコンバーターを作成する必要がありました。さらに、さまざまなエンコーディングの文字列をさまざまな組み合わせで操作するためのいくつかの関数を作成する必要がありました。たとえば、UTF-8文字列をUnicode文字列にコピーしたり、ANSI文字列をUnicode文字列に追加したりします。ただし、ANSI文字列はどこにも残っていないので、すべてのソースは完全にUTF-8エンコーディングに変換されます。
したがって、指定された名前でファイルを開くと、次のようになります。
tstrcpy(u_tfname, UsbPath); // (Unicode) (Unicode)
tstrcat_utf(u_tfname, SDIR_IMAGES); // (Unicode) (UTF-8)
tstrcat_utf(u_tfname, (char*)"\\"); // (Unicode) (UTF-8)
tstrcat(u_tfname, fname); // (Unicode) (Unicode)
すべてがすぐに機能したとき、フラッシュドライブからファイルを読み取る速度を確認したかったのです。 4KBブロックで10MBファイルを読み取ると、約9 Mbpsの速度が示されました。これは、一般的に、かなり良好で、私に適していました。
このケースをDMAに転送する問題を調査しようとしましたが、USBホストの周辺機器が単にDMAにアクセスできないことが判明しました。まあ、または私はそれを見つけられませんでした:)したがって、CCM(コア結合メモリ)内のUSBファイルのすべての読み取り/書き込みバッファを整理することは論理的であるように見えました-64 KBのRAM領域であり、DMA出力もありません。同じメモリ領域に、DMAで機能しない他の変数/アレイを配置して、通常のRAMにより多くのメモリを残すことは理にかなっています。ちなみに、カーネル自体は通常のメモリよりも少し速くこのメモリで動作するように見えました。
2.1ファイルユーザーインターフェイス
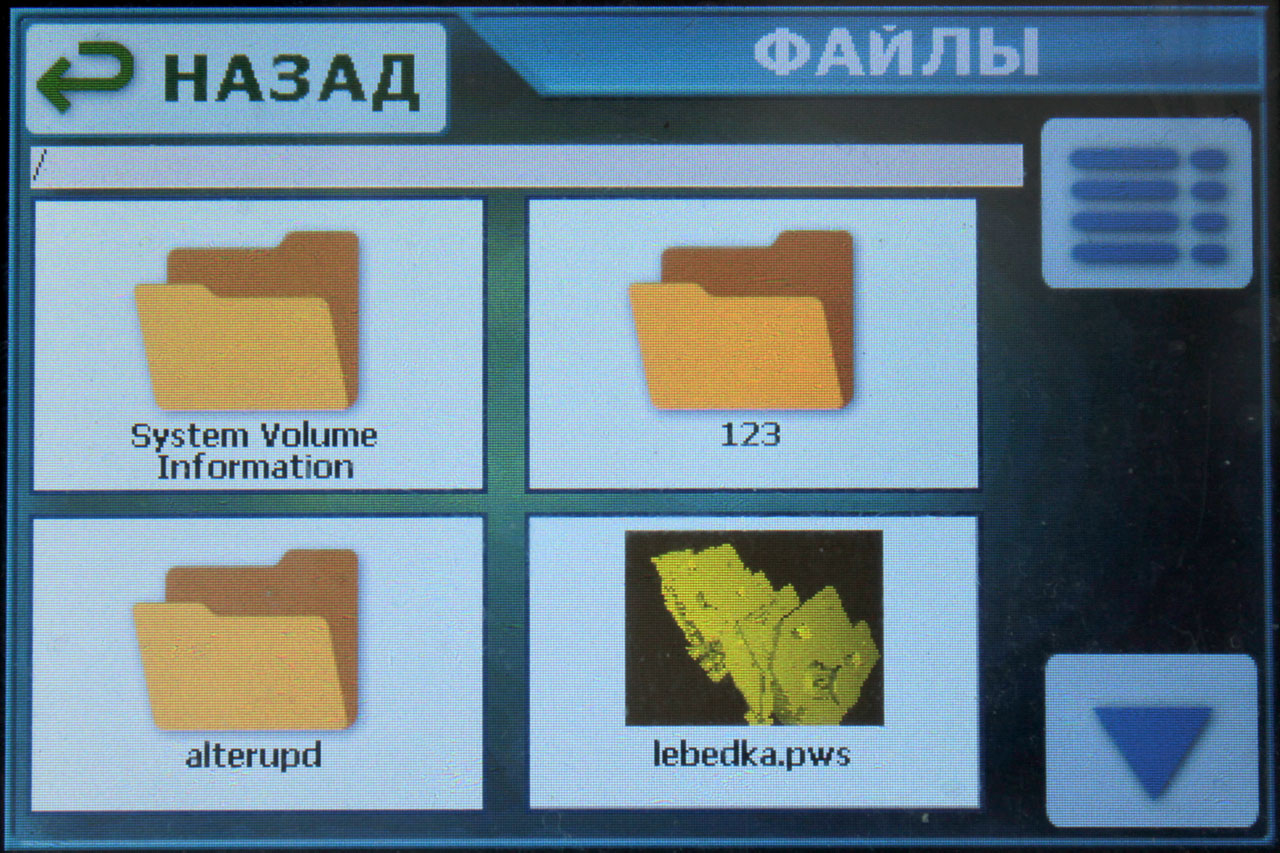
私が所有するAnycubicPhoton Sプリンターは、ファイルのリストをプレビューアイコンとして画面ごとに4つ表示します。そして、原則として、それは非常に便利です-ファイル名を見ることができ、プレビュー画像でおおよそどのようなモデルを見ることができます。したがって、私は同じパスをたどりました。ファイルは、ファイル名が付いたプレビュー画像の形式で1ページに4個表示されます。
おなじみの黄色いフォルダがディレクトリアイコンに描かれ、ギアが設定ファイルに描かれています。拡張子が既知のファイルのいずれかに該当するファイルのみが表示されます。現在、これらは.pwsファイル(スライサーによって印刷用に準備されたファイル)と.acfgファイル(プリンター設定のあるテキストファイル)です。
ファームウェアはユーザーが入力できるディレクトリでも機能するため、現在のパスが書き込まれているファイルのリストの上に1行を配置しました。現在のディレクトリを離れたり、上下にスクロールしたりするためのボタンは、意味がある場合、つまり、現在のディレクトリを離れたり、リストを上下にスクロールしたりできる場合にのみ表示されます。

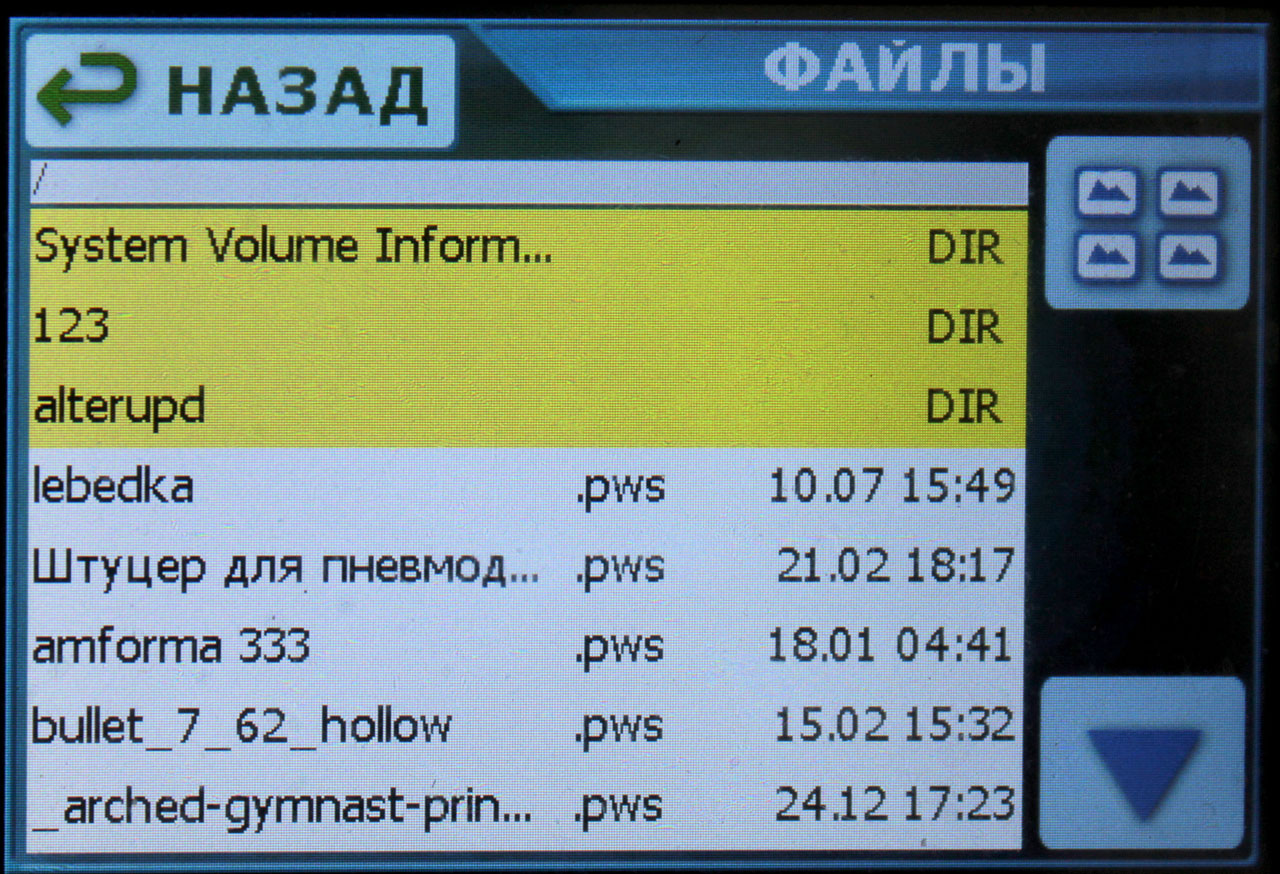
ファームウェアが書かれているときに私がこれらすべてを見せた私の友人は、ファイルを出力するための別のオプションを提案しました-リスト、テーブルの形で。第一に、より多くのファイルがページに収まります。第二に、ファイルからプレビュー画像を読み取ってディスプレイに拡大縮小して描画する必要がないため、リストがはるかに高速に表示されます。第三に、表形式で、名前に加えて表示することもできます。ファイルが最後に変更された時刻。これは非常に便利な場合があります。良いアイデアを拒否するのは罪なので、テーブルリストを追加すると同時に、「アイコン」ビューと「テーブル」ビューを切り替えるボタンを追加しました。表形式のディレクトリは黄色の背景で強調表示され、日時の代わりに「DIR」という行が書き込まれます。
ちなみに、アイコンモードでファイル用に描かれたプレビュー画像については興味をそそられません。一部の人が考えるように、ファームウェアはファイル全体を分析して3Dモデルから画像を作成するわけではありません:)この画像は、16ビットピクセルカラー値の配列であるBMPと同様の形式でスライサー自体によって印刷ファイルに保存されます。プレビュー画像のサイズは、ファイル内の特別なフィールドに保存されます。したがって、すべてが非常に単純です。
ファームウェアが負担しなければならない唯一のことは、ファイルからディスプレイ上のアイコンのサイズに画像を拡大縮小することです。ファームウェアは非常に簡単な方法でスケーリングを実行します。スケーリング係数kを計算します。(分数)-元の画像の幅をディスプレイの表示領域の幅で割った後(高さ係数も計算され、2つの値の最大値が使用されます)、元の画像からピクセルと線が取得され、kのステップでディスプレイに表示されます。
このようにして、プラスとマイナスの両方でスケーリングできます。もちろん、スケーリングされた結果の品質は、補間が実行されないため、多くの要望が残されていますが、このように小さくて高品質ではないディスプレイでは、知覚できませんが、このようなアルゴリズムの速度は非常に高速です。
.pwsファイルのアイコンまたは行をクリックすると、ファイルに関する情報を表示するための画面が開き、ファイルの印刷を開始できます。.acfgファイルをクリックすると、ユーザーはこのファイルから設定をロードするように求められます。さて、ディレクトリが押されると、それは最新になり、ファイルのリストが更新されます。
2.2印刷前のファイル情報の表示
前の部分のコメントで正しく指摘したように、Anycubicは、選択されたときにファイルに関する情報を持っていません。印刷と削除を開始するためのボタンが表示されます。そして、これは非常に不便です-推定印刷時間、レイヤー数、またはこのファイルの他のパラメーターを見つけるには、印刷を開始する必要があります。この欠陥を繰り返さないことにしました。切り取ったファイルをクリックすると、

ファイル名、サイズ、最終変更時刻、ほとんどすべての印刷パラメータなど、最も完全な情報が表示された画面が開きます。ただし、ここでは、MKS DLPディスプレイの解像度が480x320であるのに対し、Enikubiksの解像度は320x240と小さいため、大量のテキストで実際にスイングすることはできません。
2.2.1印刷時間の計算については、別途書きます。
他のすべてのパラメーターとは異なり、このインジケーターはファイルに保存されません。彼のプリンターは、彼が知っている情報に基づいて、独立して計算する必要があります。同じAnycubicPhoton Sには、この計算でオーバーシュートする傾向があり、下向きになります。たとえば、5時間の印刷が約束されていますが、実際には6時間の印刷が約束されています。そして、一般的に印刷中のLonger Orange 30は、今回はほぼ2回前後に変化します。私はこの点にできるだけ注意深く取り組むことにしました。今回は何で構成されていますか?- プラットフォームが特定の速度で次のレイヤーの高さまで下降するのにかかる時間。
- 露光開始前の休止時間。
- 層の露出時間。
- レイヤーが露出した後、プラットフォームが特定の速度で特定の高さまで上昇するのにかかる時間。
これらの4つのパラメーターを合計し、レイヤー数を掛けて、合計印刷時間を取得します。すべてが一時停止時間と露出時間で基本的なものである場合、それらはミリ秒の精度で維持されますが、プラットフォームの動きにより、すべてがすでにもう少し複雑になります。
プラットフォームは設定された速度を即座に取得するのではなく、設定で設定されている加速があります。さらに、印刷する場合、これはかなり小さな加速です。プラットフォームが非常にスムーズに上昇し始め、最後の硬化層がバスの底でフィルムから痛みを伴わずに剥がれるためです(残念ながら、ポリマーもフィルムに付着します)。
プラットフォームの動きは、特定の速度に達するまでの加速、特定の速度での均一な動き、完全に停止するまでの減速の3つの要素で構成されていることがわかります。そして、ここからオプションが始まります。たとえば、指定された加速とリフトの高さでは、プラットフォームが指定された速度に到達できません。指定された高さで停止するために減速を開始する必要がある時点で、まだ加速しています。または、加速と高度は、プラットフォームが設定された速度まで加速し、減速を開始する前に安定した動きでパスの一部を移動するのに十分です。これらすべてをチェックし、各コンポーネントの時間と距離を計算する必要があります。
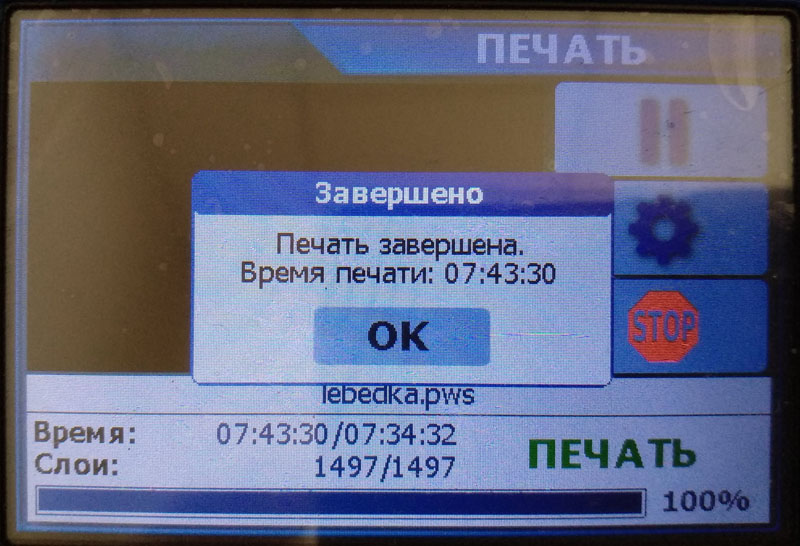
正直なところ、印刷時間計算関数を書いたとき、頭が回転していました:)その結果、まだ小さなエラーが発生しました。たとえば、実際の印刷時間は、推定07:34:32ではなく07:43:30です。
または、計算された05:43:23の代わりに05:48:43。
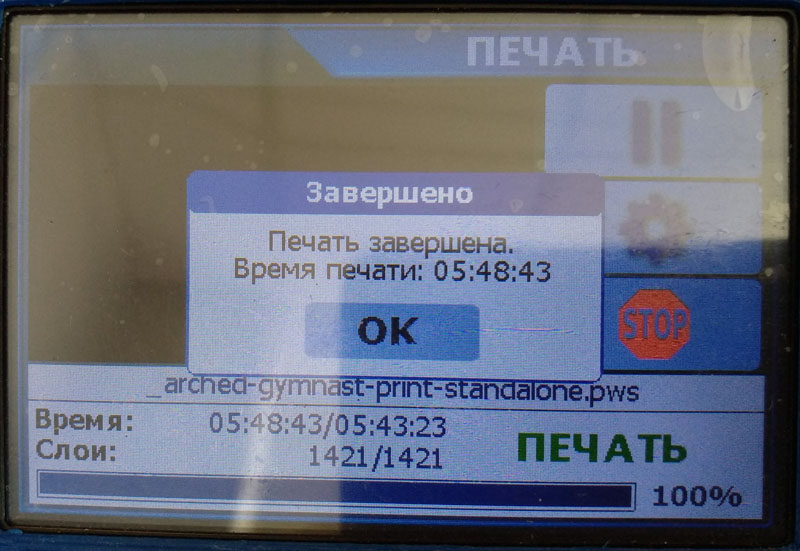
しかし、原則として、このエラーは私に適していました。計算の誤りを見つけようとしましたが、すべてが正しいようです。ステッパーモーター制御の特殊性により、実際の加速度が指定の加速度とわずかに一致していない可能性があります。とてもスムーズに次の段階に進みました:)
3.プラットフォーム移動用のステッパーモーター制御。
最初は、自分でステッパーモーターコントロールを書くことを考えていました。ボード上に通常のドライバーを配置することは、まったく難しいことではありません。一方のピンで回転方向を設定し、ステップのパルスをもう一方のピンに駆動します。あなたは速く回転する必要があります-あなたはパルス周波数を上げる必要があります、あなたはゆっくりする必要があります-あなたはそれを減らします。
しかし、私がこの問題にもっと具体的に取り組み始めたとき、私はその単純さがだまされていることに気づきました。いいえ、自分で書くことができ、それは機能しますが、うまく機能するように書くことはかなり大きな作業です。ステッパーモーターはステップの不規則性をあまり好まないため、数ヘルツから数十キロヘルツまでのかなり広い周波数範囲でステップパルスの良好な均一性を確保する必要があります。加速と減速のためのパルスの周波数のスムーズな増減を確実にする必要があります。プラットフォームが現在どの位置にあるかを確実に知るためには、生成されたインパルスを正確にカウントする必要があります。必要な加速を提供するために、厳密に定義された期間内のパルス数とそれらの周波数変化の周期を計算する必要があります。
要するに、このタスクは実行可能ではありますが、非常に膨大であり、1日以上かかることになります。そこで、マーリンからエンジン管理機能を引き出すことにしました。簡単だと思いました...
まず、マーリンのソースからstepper.cppファイルを取得しました-ステッパーモーターを直接制御します。しかし、その作業はplanner.cppファイルのモーションプランナーに大きく依存していることが判明したので、私もそれを取る必要がありました。さて、ヒープに、そこからendstops.cppファイルも取得しました-軸制限スイッチからのイベントを処理する必要があるため、軸制限スイッチを処理します。ここでは、スケジューラとエンジン制御が制限スイッチ用にこのファイルにすでに関連付けられています。
私はこれらのファイルから不要なものをすべて削除し、Marlinエコシステムの残りの部分からそれらを解くために非常に長い時間を費やしました。事実、マーリンは6つまたは7つのステッパーの制御下で同時に鋭利化されますが、それらの作業は複数のヒーターの温度、プラスチックのパラメーターなどに依存する場合があります。システムはそこで本当に複雑です。私は多くのやり直しをしなければなりませんでした。主に不要な軸と不要な押出機を削除し、元のバージョンでは有用でしたが私の中で非常に邪魔なマクロの束をすべて取り除きました。理解のために、マーリンから取得したソースのサイズは346KBから121KBに削減されました。そして、すべての行を注意して削除する必要がありました。
当然のことながら、このハードな剪定の過程で、私はシステム全体の作業、それがどのように機能するかについて少し深く理解しました。軸を移動するには、軸の目標位置がその機能の1つを介してスケジューラに転送されます(現在の位置はスケジューラによって保存されます)。スケジューラーは、加速、直線移動、減速のステップ数とそのパラメーターを計算し、これらのデータから直接モーター制御機能(ステッパー)用の特別なデータパケットを作成します。これらのパッケージはいくつか存在する可能性があり、スケジューラーは新しいタスクごとに新しい次のパッケージを計算して作成します。
タイマー割り込みで動作しているステッパーは、フリー状態で、スケジューラーに次のデータパケットを要求します。スケジューラーに準備されたパッケージがある場合、スケジューラーはそれを提供し、終了したと見なします。ステッパーは受信したパケットを処理し、そこからのデータに従ってエンジンのステップの計算を開始します。それが完了するまで、次のパケットは要求されません。
ステッパーに不思議なことに実装されているのは、低速では各割り込みで1つのステップパルスを発行し、必要な時間が経過した後に次の割り込みが発生するようにタイマーを調整することです。必要なステップレートが特定の値を超えると、ステッパーは各割り込みでいくつかのステップを発行し始めます。同時に、私がオシロスコープを見た好奇心のために、すべてのタイミングが非常によく選択されているので、ステップの均一性は非常に良好です。
スケジューラーは、隣接するパケットを「結合」する方法も知っています。これが意味すること:スケジューラーがすでにステッパー用に準備されたパケットを持っていて、新しいタスクが彼に来る場合、彼は次のパケットを形成し、前のパケットを変更して、ステッパーによるこれら2つのパケットの順次処理の結果として1つのスムーズな動きが得られるようにします。
例を挙げて説明しましょう。プランナーは無料で、30 mm / sの速度で軸を20mm前方に移動するタスクを受け取ります。プランナーは最初のパケットを生成します。このパケットには、ゼロから30 mm / sまでの加速、この速度での直線運動、およびこの速度からゼロまでの減速が記述されています。ステッパーがスケジューラーからこのパケットを取得する前に、スケジューラーがこの軸をさらに50 mm前方に移動する新しいタスクを与えられたが、すでに40 mm / sの速度である場合、スケジューラーはゼロからの加速で新しいパケットを作成するだけでなく、最初のパケットを変更します減速を取り除き、直線運動をその距離だけ延長することにより、作成された2番目のパケットでは、加速はゼロからではなく、前のパケットの速度から開始されます。
その結果、軸が30 mm / sに加速し、20 mm移動し、次に再び40 mm / sに加速し、さらに50 mm移動し、最後にゼロまで減速する1つの動きになります。ただし、これは、ステッパーが前のパッケージをまだ取得できていない場合のみです。それ以外の場合、これら2つのタスクは、それぞれの初速度と最終速度がゼロの2つの別々の動きとして処理されます。そのため、ちなみに、手動でプラットフォームを制御するプリンターでは、リフトを10 mm刻みで数回続けて押すと、最初の10 mmのリフト後にプラットフォームが停止し、ボタンをクリックしたときの高さまで止まることなく動き続けます。
マーリンの新しいバージョンでは、そのような「ぎくしゃくした」動きに対する救済策がすでに現れています-このパケットが準備ができている唯一のものである場合、スケジューラーはその形成後一定時間ステッパーパケットを与えません。今回は待機用に確保されています。次のタスクが到着するので、既存のタスクとドッキングできます。
3.1プラットフォームモーションコントロールインターフェイス
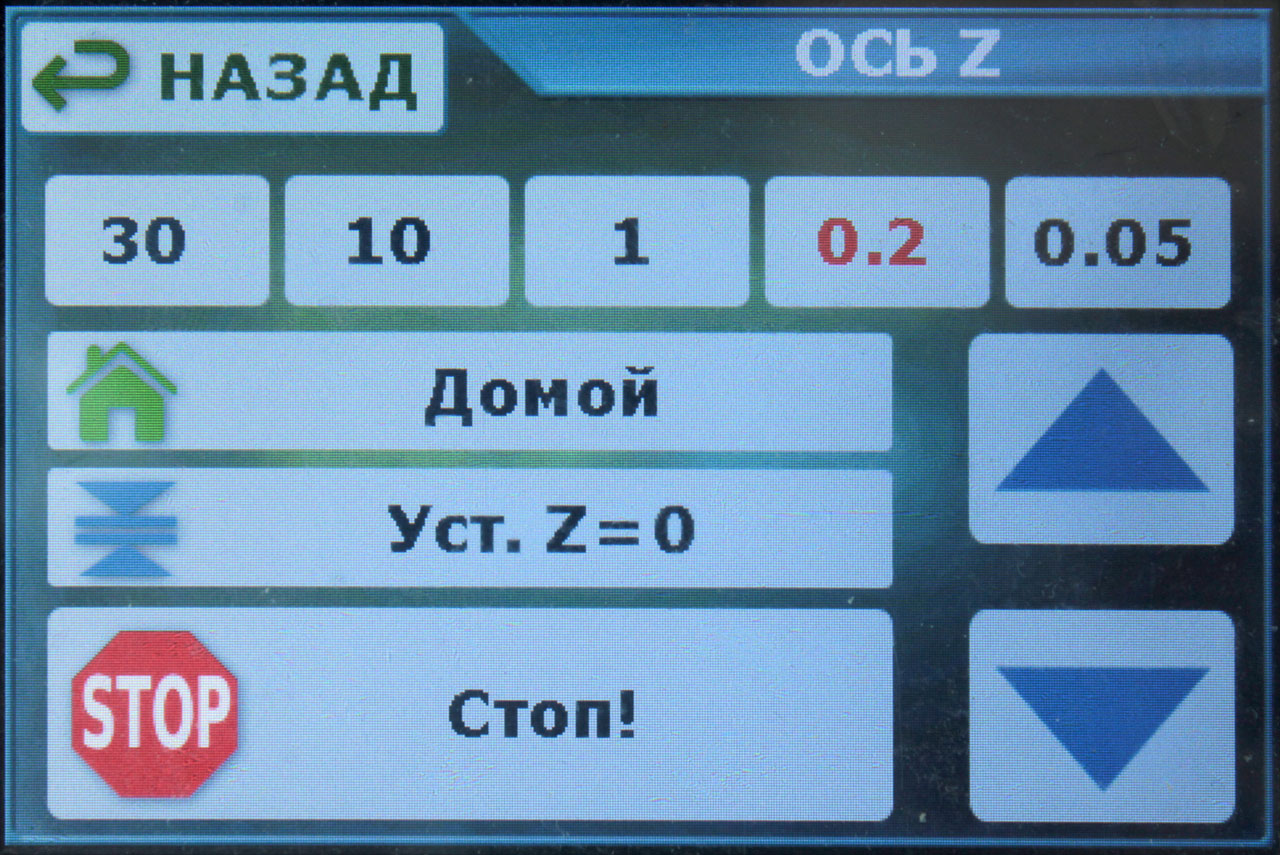
ここでは、一般的に、すべてがフォトポリマープリンターの標準的で慣習的です。上部は軸移動のステップの選択であり、右側は選択したステップで軸を上下に移動するためのボタンです。
「ホーム」ボタンは、プラットフォーム(駐車、ホーム)をゼロにするために使用されます。押すと、プラットフォームは「ホーム」制限スイッチに向かって移動し始めます。それに達すると、プラットフォームは停止し、少し戻ってゆっくりと(精度を高めるために)制限スイッチにぶつかります。その後、ファームウェアはプラットフォームの正確な現在の持ち上げ高さを確実に認識します。
セットボタン Z = 0”は、ディスプレイ上のプラットフォームの高さを調整するために使用されます。このようなキャリブレーションシステムは、たとえばAnycubicプリンターで、プラットフォームのゼロ点(ディスプレイからの最適な高さ)が「ホーム」制限スイッチのトリガーより1〜2mm下にある場合に使用されます。そして、このキャリブレーションシステムは、制限スイッチの作動の高さが同時にプラットフォームのゼロの高さである場合、最近普及しているシステムよりも正確であるように思われます。
そして最後のボタンは「やめろ!」です。プラットフォームの動きを無条件で即座に停止します。ちなみに、プラットフォームが動いている間は、この画面を離れることはできず、「戻る」ボタンは機能しません。これは、プラットフォームの移動中に停止ボタンをすぐに使用できるようにするために行われます。
3.2プラットフォームの動きに関するその他のポイント
Anycubic Photonには、私をひどく悩ませることがいくつかあります。
1つ目は、プラットフォームの手動移動が印刷モードと同じカタツムリの加速で発生する理由です。入力するときは、このような小さな加速が便利ですが、手動の軸制御で2秒間回転するときは、悪夢です。そして、動きの速度はまあまあです。
2番目のポイント-印刷が一時停止されたときに、プラットフォームが印刷パラメータで指定された速度で一時停止の高さまで上昇するのはなぜですか?地獄、プラットフォームが2(たった)センチメートル上がるのを15秒待つのは良いことではありません。しかし、起きてくれてありがとう。 Orange 30では、一時停止は1ミリメートルでもプラットフォームが持ち上げられることを意味するものではないため、なぜそこにあるのかさえ明確ではありません。
そして、ちょうど激怒する3番目の瞬間-印刷の終了後、プラットフォームは最上部に上昇します。印刷パラメータで指定されたのと同じ速度-1mm /秒。5cmの高さから登るのに100秒!
そのため、私のファームウェアでは、印刷モード用と手動プラットフォーム制御用に別々に調整可能な速度と加速を作成しました。ただし、2つの制限があります。
- ホームボタンで軸をリセットするまで、移動速度は3分の1になります。これは、プリンターが現在の正確なプラットフォームの高さを認識していなくても、高速で停止したり(慣性など)停止したり、上部アクスルストップを損傷したりせずにディスプレイを押しつぶす危険があるためです。軸をゼロにした後、プリンターはすでにプラットフォームの正確な位置を認識しており、ソフトウェアの高さ制限が有効になります。これらも設定で設定されます。
- 高さが30mm未満の場合、軸がゼロになっているかどうかに関係なく、速度も3分の1に低下します。これは、プラットフォームがバス内に急激に下がったときに、フォトポリマーがバスから飛び散るのを防ぐためです。またはそれからあまりにも速く登るとき。
もちろん、設定には他の標準軸パラメータがあります-1 mmあたりのステップ数、移動方向、制限スイッチの動作など。興味のある方は、スポイラーの下に、サポートされているすべてのパラメーターを含むテキスト構成ファイルがあります。拡張子が.acfgのこのようなファイルは、ファイルリストから直接ファームウェアによって食べられ、パラメーターをロードしてEPROMに保存し、再起動せずにすぐに適用します。
構成ファイルの内容
# Stepper motor Z axis settings
[ZMotor]
# .
# : 0 1. : 1.
# .
invert_dir = 1
# .
# : -1 1. : -1.
# -1,
# , . 1
# .
home_direction = -1
# Z . ,
# 0, - .
home_pos = 0.0
# .
# : -32000.0 32000.0.
# : -3.0
# .
# , .
min_pos = -3.0
# .
# : -32000.0 32000.0.
# : 180.0
# .
# , .
max_pos = 180.0
# .
# : 0 1. : 1.
# ,
# 1, - 0.
min_endstop_inverting = 1
# .
# : 0 1. : 1.
# ,
# 1, - 0.
max_endstop_inverting = 1
# 1 .
steps_per_mm = 1600
# ,
# , /. : 6.0.
homing_feedrate_fast = 6.0
# ,
# , /. : 1.0.
homing_feedrate_slow = 1.0
# , /2.
acceleration = 0.7
# , /.
feedrate = 5.0
# ( ,
# ..), /2.
travel_acceleration = 25.0
# ( ,
# ..), /. 30
# ,
# 5 /.
travel_feedrate = 25.0
# , .
current_vref = 800.0
# , .
current_hold_vref = 300.0
# ,
# . . 0
# .
hold_time = 30.0
# ,
# . .
# hold_time. 0 .
# , .
off_time = 10.0
# General settings
[General]
# (0.001 )
# .
# : 0 15000. : 700 (0.7 ).
buzzer_msg_duration = 700
# (0.001 )
# , .
# : 0 15000. : 70 (0.07 ).
buzzer_touch_duration = 70
# 180 .
# .
# : 0 1. : 0.
rotate_display = 0
# , .
# LCD-. -
# .
# : 0 15000. : 10. 0 .
screensaver_time = 10
そしてそれで私はこの部分を終えます、そしてすでにあまりにも多くのテキストがあります:)
以前のように-私は質問に答えてコメントを受け入れることを嬉しく思います。
-パート1: 1。ユーザーインターフェイス。
-パート2: 2.USBフラッシュドライブ上のファイルシステムの操作。3.プラットフォーム移動用のステッパーモーター制御。
-パート3: 4。バックライトディスプレイにレイヤーの画像を表示する。5.照明とファンの制御、設定の読み込みと保存など、あらゆる小さなこと。6.快適さと便利さのための追加機能。
リンク
MKSDLPキットのAliexpressGitHub
のメーカーからの元のファームウェアソースGitHub
のボードの2つのバージョンのメーカーからのスキームGitHubの
私のソース