この記事は、網羅的なガイドとなることを意図したものではなく、資料と推奨事項のソースを集めたものです。この記事では、プロジェクト開発用のソフトウェアツールを選択する際に直面しなければならなかった問題と、ESP32モジュールの実際の適用例について触れたいと思います。次の記事では、ESP32を小型の二輪モバイルプラットフォームの制御コントローラーとして使用する例を示したいと思います。したがって、ここでは次のような詳細を検討します。
- 開発環境の選択;
- 作業環境のセットアップ、ESP-IDFプロジェクトのコンパイルとロード。
- 入力/出力信号の処理GPIO;
- MCPWMモジュールを使用したパルス幅変調。
- PCNTハードウェアカウンター;
- WI-FiおよびMQTT接続。
ESP32-WROOM-32Eモジュールの概要
データシートによると、モジュールには次のものが含まれています
。MCU
- ESP32-D0WD-V3組み込み、Xtensaデュアルコア32ビットLX6マイクロプロセッサ、最大240 MHz
- 起動およびコア機能用の448KB ROM
- データと命令用の520KBのSRAM
- RTCの16KBSRAM
Wi-Fi
- 802.11b / g / n
- ビットレート:802.11n最大150 Mbps
- A-MPDUおよびA-MSDUアグリゲーション
- 0.4 µsのガード間隔のサポート
- 動作チャネルの中心周波数範囲:2412〜2484 MHz
ブルートゥース
- Bluetooth V4.2 BR / EDRおよびBluetoothLE仕様
- クラス1、クラス2、クラス3の送信機
- AFH
- CVSDおよびSBC
ハードウェア
- Interfaces: SD card, UART, SPI, SDIO, I 2 C, LED PWM, Motor PWM, I 2 S, IR, pulse counter, GPIO, capacitive touch sensor, ADC, DAC
- 40 MHz crystal oscillator
- 4 MB SPI flash
- Operating voltage/Power supply: 3.0 ~ 3.6 V
- Operating temperature range: –40 ~ 85 °C
- Dimensions: See Table 1
Certification
- Bluetooth certification: BQB
- RF certification: FCC/CE-RED/SRRC
- Green certification: REACH/RoHS
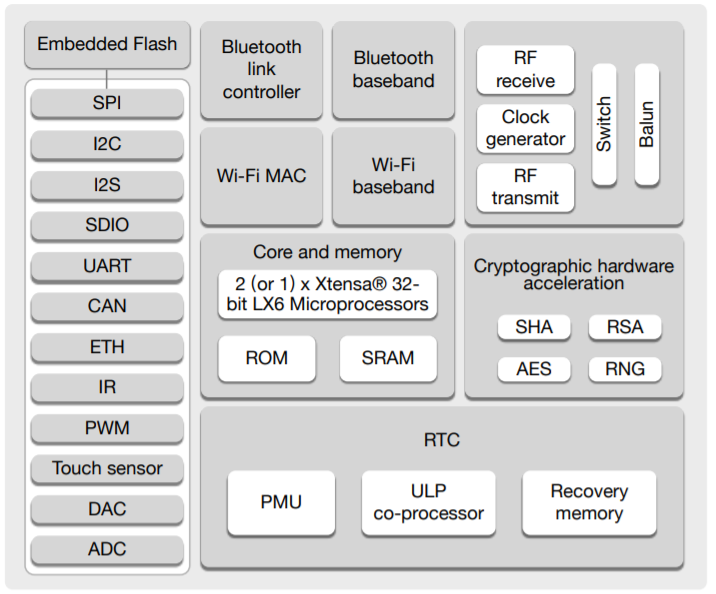
機能ブロック図
マイクロプロセッサの機能の詳細については、 Wikipediaを参照してください。
このモジュールは、ESP32-D0WD-V3 *マイクロ回路に基づいています。組み込みチップは、スケーラビリティと適応性を念頭に置いて設計されています。中央処理装置には、個別に制御できる2つのコアが含まれており、CPUクロック速度は80MHzから240MHzまで調整可能です。チップには、ピンのステータスの監視など、多くの計算能力を必要としないタスクを実行するときに電力を節約するためにCPUの代わりに使用できる低電力コプロセッサもあります。 ESP32は、容量性タッチセンサー、ホールセンサー、SDカードインターフェイス、イーサネット、高速SPI、UART、I²S、I²Cなどの豊富な周辺機器を統合しています。
技術文書は公式リソースに掲載されています。
ESP-WROOM-32モジュールのピン配置に関する情報は、ここにあるように、ネットワークのオープンスペースで簡単に見つけることができます。
開発環境の選択
Arduino IDE
AVRファミリーのマイクロコントローラー、そしてArduinoプラットフォームは、ESP32よりずっと前に登場しました。 Arduinoの重要な機能の1つは、侵入に対する障壁が比較的低いことです。これにより、ほとんどの人がすばやく簡単に何かを作成できます。このプラットフォームは、オープンソースのハードウェアコミュニティに重要な貢献をしており、膨大な数のラジオアマチュアが参加できるようになっています。 Arduino IDEは、オフサイトから無料でダウンロードできます。プロの開発環境と比較して明らかな制限があるにもかかわらず、Arduino IDEは趣味のプロジェクトに必要なものの90%をカバーしています。また、ESP32モジュールをプログラミングするためのArduino IDEのインストールと構成に関するトピックについては、ネットワーク上に十分な数の記事があります。例:ESP32用のArduinoコア、habr.com、voltiq.ruおよびrandomnerdtutorials.com。
Arduino環境でESP32をプログラミングするときは、arduino-esp32ページに示されているピン配置を考慮する必要があります。
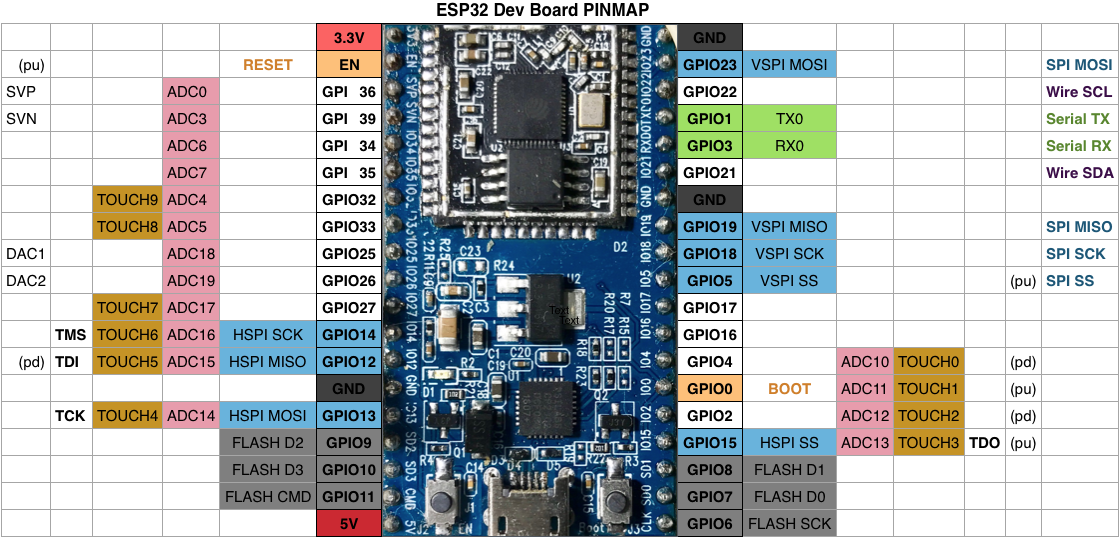
ESP32モジュールのピン配置
この設計アプローチの主な利点は、Arduinoの場合と同じ原則を使用して、プロジェクトをすばやく入力し、簡単に作成できることです。また、Arduinoのように、多くのライブラリの使用。もう1つの優れた機能は、Arduinoライブラリと設計原則を元のESP-IDFフレームワークと組み合わせる機能です。
PlatformIO
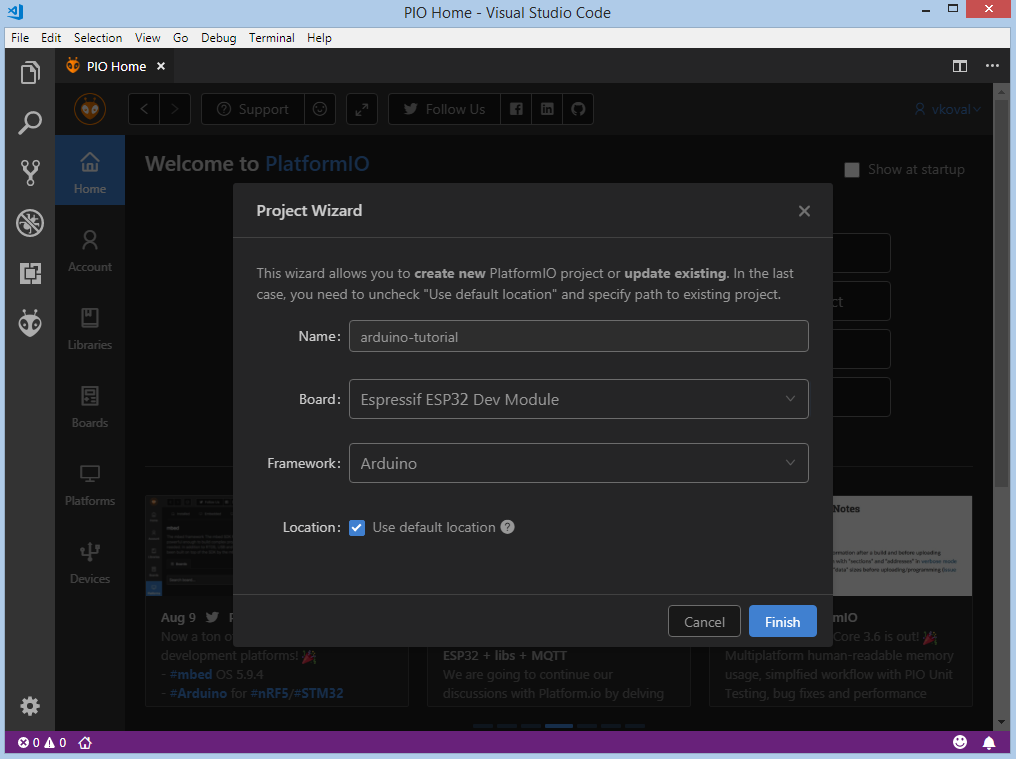
公式リソースに記載されているように、「クロスプラットフォームのPlatformIO IDEと統合デバッガー・静的コードアナライザーとリモートユニットテスト。マルチプラットフォームおよびマルチアーキテクチャビルドシステム・ファームウェアファイルエクスプローラーとメモリ検査»言い換えると、PlatformIOは、ArduinoやESP32を含む複数のプラットフォームをサポートする組み込みデバイス開発のためのエコシステムです。 IDEはVisualStudioCodeまたはAtomです。インストールと構成は非常に簡単です。コードエディターをインストールした後、プラグインのリストからPlatformIOを選択してインストールします。繰り返しになりますが、ネット上にはこのトピックに関する多くの資料があります。こことここの公式ソースから始まり、こことここの詳細なイラストを含む記事が続きます。..。
Arduino IDEと比較すると、PlatformIOには、プロジェクトの編成、プラグインのサポート、コードの完成など、最新の開発環境のすべての品質が備わっています。
PlatformIOでの開発の特徴は、すべてのプラットフォームの統一されたプロジェクト構造です。
project_dir
├── lib
│ └── README
├── platformio.ini
└── src
└── main.cpp
各PlatformIOプロジェクトには、プロジェクトのルートにplatformio.iniという名前の構成ファイルが含まれています。platformio.iniには、セクション(それぞれ[タイトル]で示されます)とセクション内のキー/値のペアがあります。ドットセミコロン文字「;」で始まる行 無視され、コメントに使用できます。複数の値パラメーターは、次の2つの方法で指定できます。
- 値を「、」(コマ+スペース)で区切ります。
- 複数行形式。新しい各行は少なくとも2つのスペースで始まります。
ESP32の次の開発機能は、フレームワークを選択する機能です:ArduinoまたはESP-IDF。フレームワークとしてArduinoを選択することにより、前述の開発上のメリットが得られます。
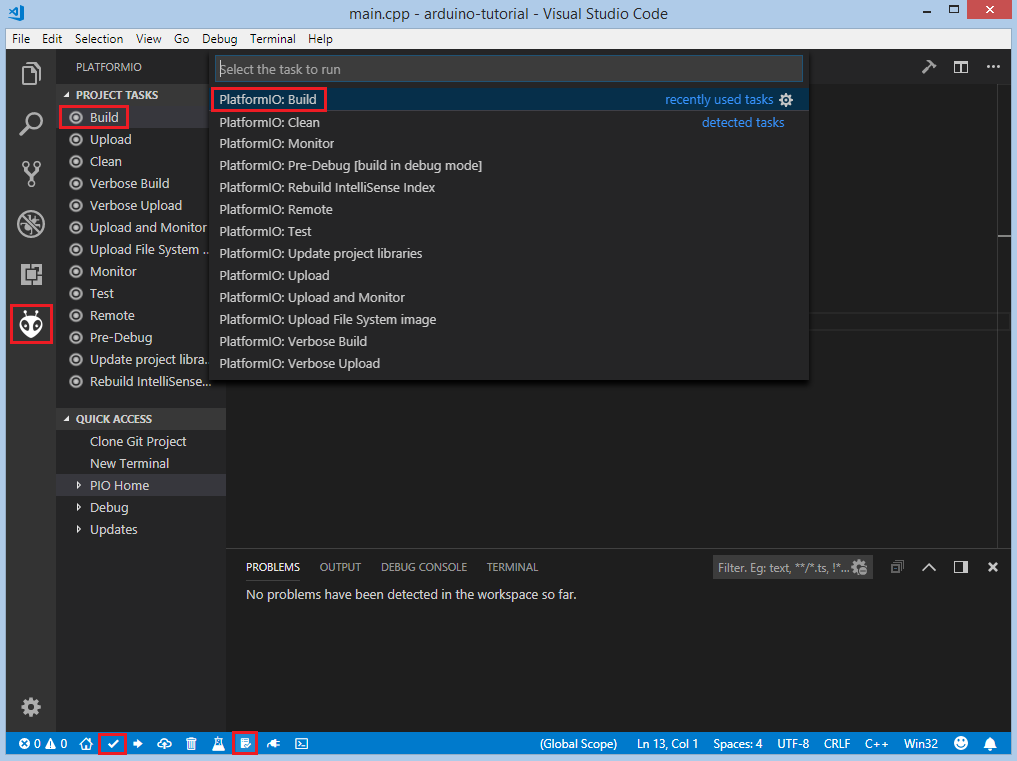
PlatformIOには、プロジェクトを構築、ダウンロード、およびデバッグするための便利なツールが含まれています
EspressifIoT開発フレームワーク
ESP32の場合、Espressifは「ESP-IDF」と呼ばれるIoT開発フレームワークと呼ばれるフレームワークを開発しました。それはGithubで見つけることができます。プロジェクトには非常に優れたドキュメントが含まれており、ベースとして使用できる例が提供されています。環境のセットアップとセットアップについては、「はじめに」セクションで詳しく説明されています。フレームワークをインストールして操作するには、いくつかのオプションがあります。
リポジトリからプロジェクトをクローンし、ユーティリティを手動でインストールします。
Githubからプロジェクトをクローニングする
mkdir -p ~/esp
cd ~/esp
git clone --recursive https://github.com/espressif/esp-idf.git
Windowsの場合、開発ユーティリティのインストールは、インストーラーまたはコマンドラインのスクリプトを使用して可能です。
cd %userprofile%\esp\esp-idf
install.bat
PowerShellの場合
cd ~/esp/esp-idf
./install.ps1
LinuxおよびmacOSの場合
cd ~/esp/esp-idf
./install.sh
次のステップは、環境変数を設定することです。インストーラーを使用して開発ツールをWindowsにインストールした場合は、コマンドコンソールへのショートカットがメニューとデスクトップに追加されます。その後、コマンドシェルを開いてプロジェクトを操作できます。または、Windowsコマンドシェルを実行するには:
%userprofile%\esp\esp-idf\export.batまたはWindowsPowerShell:
.$HOME/esp/esp-idf/export.ps1LinuxとmacOS:
. $HOME/esp/esp-idf/export.shドットとスクリプトへのパスの間のスペースに注意する必要があります。
さらにガイドでは、LinuxまたはmacOSで作業している場合は、ユーザープロファイルで環境変数を設定するためのエイリアスをスクリプトに追加することをお勧めします。これを行うには、次のコマンドをコピーしてシェルプロファイル(.profile、.bashrc、.zprofileなど)に貼り付けます。
alias get_idf='. $HOME/esp/esp-idf/export.sh'コンソールでget_idfコマンドを呼び出すと、必要な環境変数がエクスポートされます。私の場合、python仮想環境を開始するためにエイリアスを登録する必要もありました
alias esp_va=’source $HOME/.espressif/python_env/idf4.2_py2.7_env/bin/activate’次のエイリアスに追加します
alias get_idf='esp_ve && . $HOME/esp/esp-idf/export.sh'新しいプロジェクトを最初から作成するには、 github.comからソースを複製するか、examples esp-idf / examples / get-started / hello_world /を使用してディレクトリからコピーします。
プロジェクトの構造、コンパイル、ロード、構成ユーティリティなどに関する情報は、ここにあります。
プロジェクトは、次の構造のディレクトリです。
- myProject/
- CMakeLists.txt
- sdkconfig
- components/ - component1/ - CMakeLists.txt
- Kconfig
- src1.c
- component2/ - CMakeLists.txt
- Kconfig
- src1.c
- include/ - component2.h
- main/ - CMakeLists.txt
- src1.c
- src2.c
- build/
プロジェクト構成は、ルートディレクトリのsdkconfigファイルに含まれています。設定を変更するには、idf.py menuconfigコマンド(またはWindowsの場合はidf.py.exe menuconfig)を呼び出す必要があります。
通常、2つのアプリケーションが1つのプロジェクトで作成されます。「プロジェクトアプリ」(メインの実行可能ファイル、つまりカスタムファームウェア)と「ブートローダーアプリ」(プロジェクトのブートローダーのプログラム)です。
「コンポーネント」は、静的ライブラリ(.aファイル)にコンパイルされ、アプリケーションにリンクされるスタンドアロンコードのモジュール部分です。これらの一部はESP-IDF自体によって提供され、その他は他のソースから取得される場合があります。
idf.pyコマンドラインユーティリティは、プロジェクトビルドを簡単に管理するためのインターフェイスを提供します。Windowsでのその場所は%userprofile%\です。Espressif\ tools \ idf-exe \ 1.0.1 \ idf.py.exe。彼女は次の楽器を操作します。
- CMake-ビルドするプロジェクトを構成します
- コンソールプロジェクトビルダー:Ninja、またはGNU Make)
- esptool.py-モジュールのフラッシュ用。
各プロジェクトには、プロジェクト全体のビルド設定を含む1つのトップレベルのCMakeLists.txtファイルがあります。最小限のファイル構成には、次の必須行が含まれます。
cmake_minimum_required(VERSION 3.5)
include($ENV{IDF_PATH}/tools/cmake/project.cmake)
project(myProject)
ESP-IDFプロジェクトは、メインディレクトリがコードを実行するメインコンポーネントであるコンポーネントのコレクションと考えることができます。したがって、このディレクトリにはCMakeLists.txtファイルも含まれています。ほとんどの場合、その構造は似ています。
idf_component_register(SRCS "main.c" INCLUDE_DIRS ".")ソースファイルmain.cをコンポーネントに登録する必要があり、ヘッダーファイルが現在のディレクトリに含まれていることが示されている場合。必要に応じて、CMakeLists.txtプロジェクトでEXTRA_COMPONENT_DIRSを設定することにより、メインディレクトリの名前を変更できます。詳細については、こちらをご覧ください。
さらに、ディレクトリには、エントリポイント(void app_main(void)関数)を持つ元のmain.c(名前は任意)ファイルが含まれています。
カスタムコンポーネントは、componentsディレクトリに作成されます。このプロセスについては、「コンポーネント要件」セクションで詳しく説明しています。
ほとんどの場合、ESP32モジュールをコンピューターに接続するには、既存のブートローダーがあるため、ArduinoボードのようなUSBケーブルを使用します。このプロセスについては、こちらで詳しく説明しています。..。必要なのは、システム内にUSBからUARTへのコンバータードライバーが存在することだけです。これは、提供されたソースからダウンロードできます。ドライバをインストールした後、コンパイルされたファームウェアをモジュールにロードするために、システムのCOMポート番号を決定する必要があります。
プロジェクトの構成。
ほとんどの場合、デフォルト設定で問題ありません。ただし、コンソールメニューインターフェイスを呼び出すには、プロジェクトディレクトリに移動し、コマンドラインを入力する必要があります。
idf.py menuconfig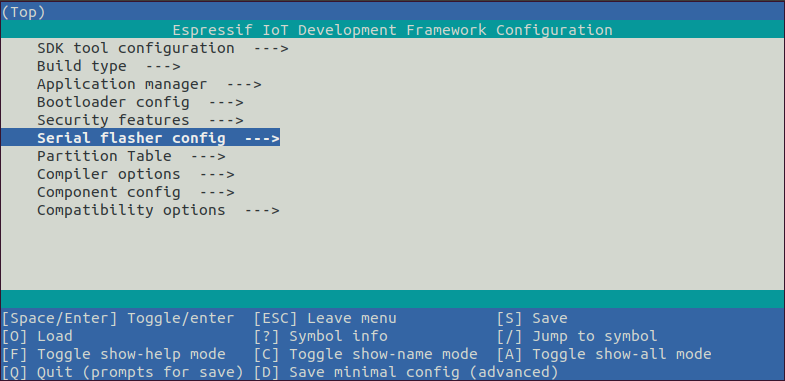
構成設定のメニュー
このコマンドを呼び出した後、sdkconfigファイルは、以前に作成されていない場合、または再構成されている場合に作成されます。以前のチュートリアルでは、廃止されたmakemenuconfigコマンドがあります。
sdkconfigファイルにカスタム設定を追加することは手動で可能です。例:
#
# WiFi Settings
#
CONFIG_ESP_HOST_NAME=" "
CONFIG_ESP_WIFI_SSID=" "
CONFIG_ESP_WIFI_PASSWORD=""
ただし、推奨される方法は、追加の構成ファイルKconfig.projbuildを使用することです。このファイルは、コンポーネントのあるディレクトリに配置する必要があります。ファイルの内容は次のとおりです。
# put here your custom config value
menu "Example Configuration"
config ESP_WIFI_SSID
string "Keenetic"
default "myssid"
help
SSID (network name) for the example to connect to.
config ESP_WIFI_PASSWORD
string "password"
default "mypassword"
help
WiFi password (WPA or WPA2) for the example to use.
endmenu
idf.py menuconfigコマンドを呼び出した後、追加のセクションがsdkconfigファイルに自動的に追加されます。PlatformIOプロジェクトでidf.pymenuconfigコマンドを呼び出すこともできますが、PlatformIOプロジェクトの構造が従来のESP-IDFとは異なるという事実を考慮する必要があります。そのため、sdkconfigファイルを再生成してカスタム設定を微調整できます。上記のオプションはここで可能です-手動でファイルを編集する、mainのsrcディレクトリの名前を一時的に変更する、またはCMakeLists.txtファイルを設定します。
プロジェクトをコンパイルしてロードします。
プロジェクトをビルドするには、コマンドを入力する必要があります
idf.py buildこのコマンドは、アプリケーションとすべてのESP-IDFコンポーネントをコンパイルしてから、ローダー、パーティションテーブル、およびアプリケーションバイナリを生成します。
$ idf.py build
Running cmake in directory /path/to/hello_world/build
Executing "cmake -G Ninja --warn-uninitialized /path/to/hello_world"...
Warn about uninitialized values.
-- Found Git: /usr/bin/git (found version "2.17.0")
-- Building empty aws_iot component due to configuration
-- Component names: ...
-- Component paths: ...
... (more lines of build system output)
[527/527] Generating hello-world.bin
esptool.py v2.3.1
Project build complete. To flash, run this command:
../../../components/esptool_py/esptool/esptool.py -p (PORT) -b 921600 write_flash --flash_mode dio --flash_size detect --flash_freq 40m 0x10000 build/hello-world.bin build 0x1000 build/bootloader/bootloader.bin 0x8000 build/partition_table/partition-table.bin
or run 'idf.py -p PORT flash'
単純なプロジェクトでも最初のコンパイルプロセスには時間がかかるため、Arduinoフレームワークとは異なり、多くの追加のESP-IDFモジュールがコンパイルされることに注意してください。ソースをさらに変更すると、同じファイルがコンパイルされるだけです。例外は構成の変更です。
コンパイルされたバイナリ(bootloader.bin、partition-table.bin、およびhello-world.bin)をESP32ボードにダウンロードするには、次のコマンドを実行します。
idf.py -p PORT [-b BAUD] flashここで、PORTを必要なもの(COM1、/ dev / ttyUSB1)に置き換え、オプションでBAUDに必要な値を指定してダウンロード速度を変更できます。
ロードされたプログラムを追跡するには、HTerm、CoolTermなどの任意のcomポート監視ユーティリティを使用できます。、またはIDFモニター監視ユーティリティを使用して開始するには、次のコマンドを入力します。
idf.py -p PORT monitorESP-IDFEclipseプラグイン
プラグインのインストールと構成に関するドキュメントは、次の場所にあり
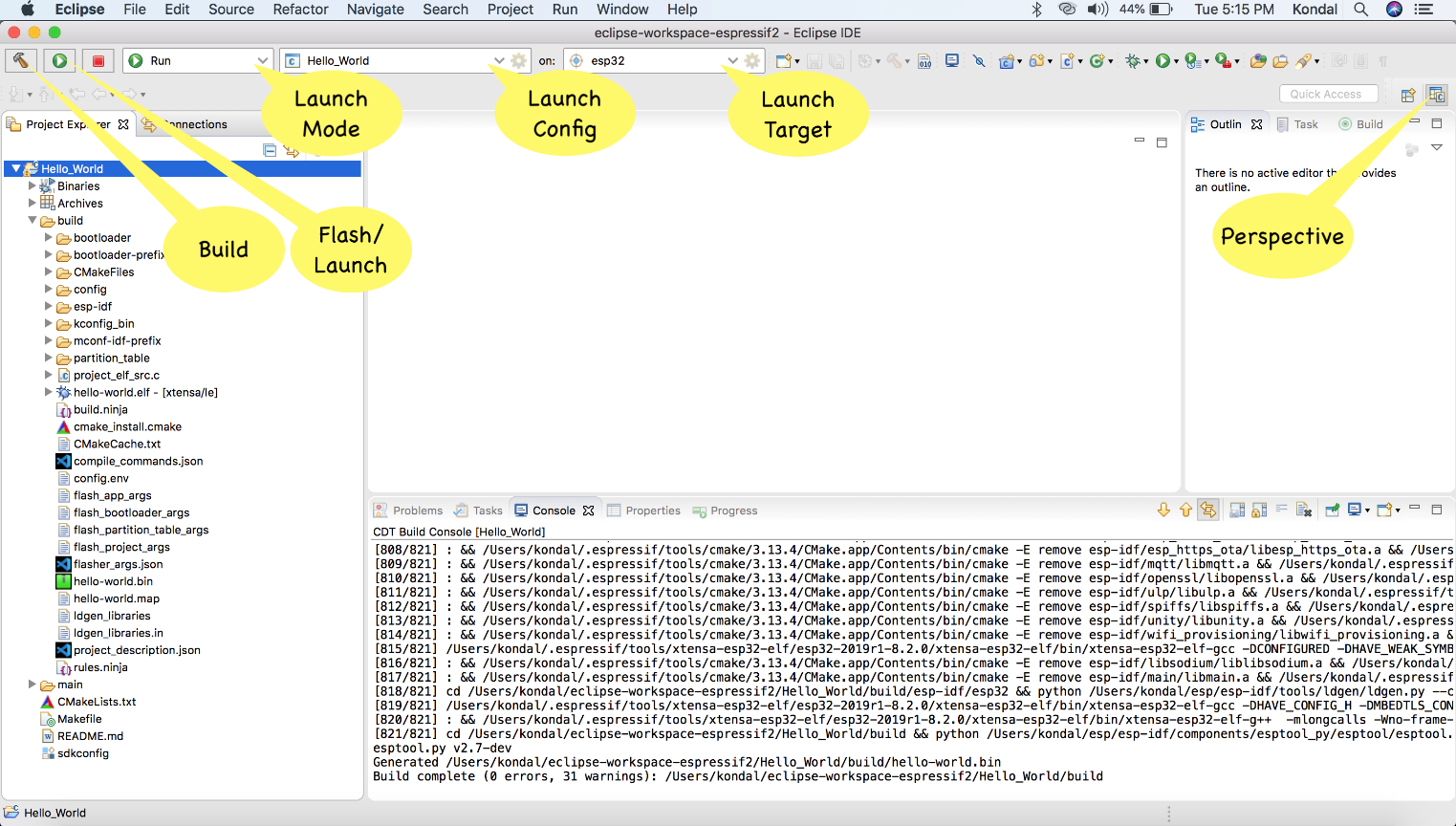
ます。使用するプリセット:
- Java11以降。(Java 8で動作しますが、おそらくこのグリッチが原因です)。
- Python3.5以降。
- Eclipse 2020-06 CDT;
- ギット;
- ESP-IDF4.0以降。
プラグインは開発環境に非常によく統合されており、機能の大部分を自動化します。しかし、残念ながら、軟膏にハエがないわけではありません。2019-09以降のEclipseバージョンでは、Windows上のESP-IDFプロジェクトのソースファイルのインデックス作成にまだバグがあります。

さらに、不明な理由でプロジェクトが単純にビルドされない場合、他の不具合が発生します。プロジェクトを閉じてEclipseを再起動するだけで役に立ちます。
ESP-IDF VisualStudioコード拡張
そして最後に、私の意見では、最も興味深いオプションはVisual StudioCodeの公式プラグインです。
PlatformIOと同様に、拡張機能セクションから簡単にインストールできます。この拡張機能でのESP-IDFフレームワークのインストールと構成は、オンボーディングメニューとして表示されます。これについても、説明で説明しています。すべてのコンポーネントのダウンロードとインストールは、メニュー段階を通過する過程で自動的に行われます。プロセスのすべてのスクリーンショットを引用できますが、それらは直感的であり、説明はほとんどまたはまったく必要ありません。 PlatformIOを支持して、プロジェクトを構築、ダウンロード、および監視するためのより便利なツールキットに注目することができます。対照的に、ESP-IDFプラグインは、F1キー、またはマニュアルに記載されているキーの組み合わせを使用して呼び出すことができるコマンドメニューを使用して制御されます。
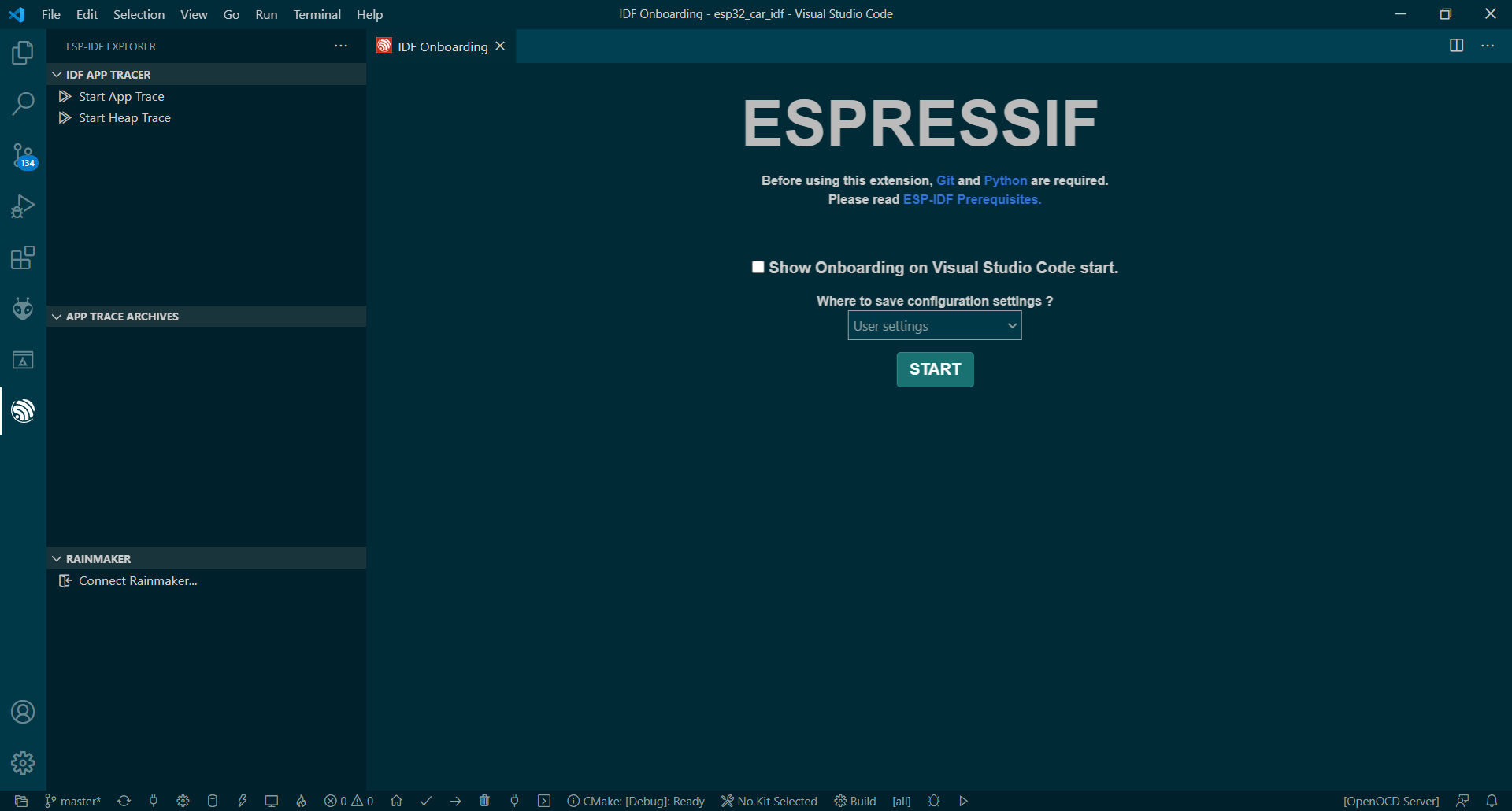
プラグインの初期設定
プラグインを使用する利点は、従来のプロジェクト構造が尊重され、設定をいじくり回す必要がないことです(PlatformIOでは、このような必要が生じます)。以前に作成したプロジェクトをESP-IDFプラグインを使用してVisualStudioコードで開く場合は、.vscodeディレクトリをプロジェクトのルートにコピーするだけで済みます。これは、ESP-を使用してテンプレートプロジェクトを少なくとも1回生成することで取得できます。 IDFプラグイン。

コマンドメニュー
FreeRTOS
ウィキペディアによると、FreeRTOSは組み込みシステム用のリアルタイムマルチタスクオペレーティングシステム(RTOS)です。FreeRTOSは、すべてのスレッド、またはOS用語ではタスクによってCPU時間を共有することにより、マルチタスクを提供します。私の意見では、ロシア語で最も完全でわかりやすいFreeRTOSマニュアルはここにあります。元の言語では、マニュアルは公式ソースから調べることができます。タスクのステータスの写真のみを提供します。
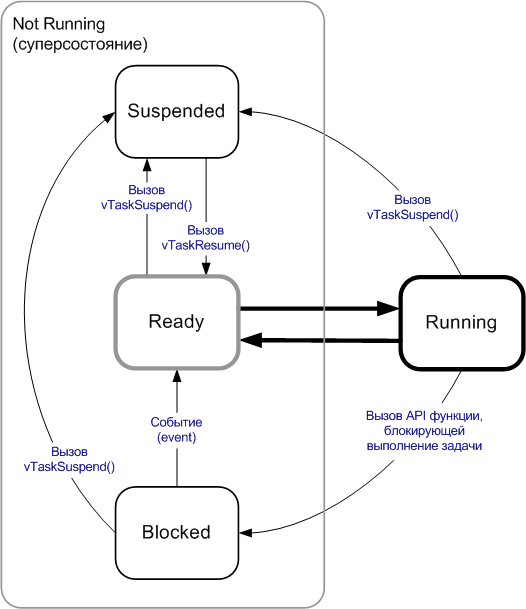
FreeRTOSは、ESP32で使用されるXtensaプロセッサを含む、さまざまなハードウェアプラットフォームに移植されています。詳細については、ドキュメントをご覧ください。
GPIO
GPIOまたはユニバーサル入力/出力は、「1」または「0」信号でピンを個別に制御する機能です。
名前が示すように、このようなピンには、入力または出力の2つの動作モードがあります。最初のケースでは、値を読み取り、2番目のケースでは、それを書き留めます。 GPIOを扱う際のもう1つの重要な要素は、電圧レベルです。 ESP32は3.3Vデバイスであるため、5V以上の電圧を持つ他のデバイスを使用する場合は注意が必要です。 GPIOピンに適用できる最大電流は12mAであることを理解することも重要です。 ESP-IDFが提供するGPIO関数を使用するには、driver /gpio.hヘッダーを接続する必要があります。次に、gpio_pad_select_gpio()を呼び出して、このピンの機能を指定できます。 ESP32には34の異なるGPIOがあります。それらは次のように指定されます。
- GPIO_NUM_0-GPIO_NUM_19
- GPIO_NUM_21-GPIO_NUM_23
- GPIO_NUM_25-GPIO_NUM_27
- GPIO_NUM_32-GPIO_NUM_39
次の番号は、ピン
20、24、28、29、30 、および31の数には含まれていません。ピン配置表はここにあります。
ピンGPIO_NUM_34-GPIO_NUM_39-は入力モードのみを使用することに注意してください。信号出力には使用できません。さらに、ピン6、7、8、9、10、および11は、SPIを介して外部フラッシュカードと対話するために使用されます。他の目的で使用することはお勧めしませんが、本当に必要な場合は使用できます。gpio_num_tデータタイプは、ピン番号に対応する値を持つ列挙型です。数値ではなく、これらの値を使用することをお勧めします。ピンの方向は、gpio_set_direction()関数を使用して設定されます。たとえば、ピンを出力として設定するには、次のようにします。
gpio_set_direction(GPIO_NUM_17, GPIO_MODE_OUTPUT);ピンを入力として設定するには:
gpio_set_direction(GPIO_NUM_17, GPIO_MODE_INPUT);GPIOを出力として構成した場合、gpio_set_level()を呼び出すことにより、その値を1または0に設定できます。
次の例では、GPIOを1秒に1回切り替えます。
gpio_pad_select_gpio(GPIO_NUM_17);
gpio_set_direction(GPIO_NUM_17, GPIO_MODE_OUTPUT);
while(1) {
printf("Off\n");
gpio_set_level(GPIO_NUM_17, 0);
vTaskDelay(1000 / portTICK_RATE_MS);
printf("On\n");
gpio_set_level(GPIO_NUM_17, 1);
vTaskDelay(1000 / portTICK_RATE_MS);
}
個々のピンのすべての属性を設定する代わりに、gpio_config()関数を呼び出して1つ以上の接点のプロパティを設定できます。入力としてgpio_config_t構造を取り、ビットマスクで表されるすべてのピンの方向、プルアップ、プルダウン、および割り込み設定を設定します。
例えば:
gpio_config_t gpioConfig;
gpioConfig.pin_bit_mask = (1 << 16) | (1 << 17);
gpioConfig.mode = GPIO_MODE_OUTPUT;
gpioConfig.pull_up_en = GPIO_PULLUP_DISABLE;
gpioConfig.pull_down_en = GPIO_PULLDOWN_ENABLE;
gpioConfig.intr_type = GPIO_INTR_DISABLE;
gpio_config(&gpioConfig);
プルアップおよびプルダウン設定
通常、GPIO入力ピンがハイまたはローであると読み取られます。これは、電源またはアースに接続されていることを意味します。ただし、ピンが何にも接続されていない場合は、「フローティング」状態になっています。多くの場合、接続されていないピンの初期レベルを高または低に設定する必要があります。この場合、出力のハードウェア(抵抗を使用した接続)またはソフトウェアのプルアップが、それぞれ+ V-プルアップまたは0-プルダウンに実行されます。 ESP32 SDKでは、gpio_set_pull_mode()関数を使用して、GPIOをプルアップまたはプルダウンとして定義できます。この関数は、設定するピンの番号と、そのピンに関連付けられているプルアップモードを入力として受け取ります。
例えば:
gpio_set_pull_mode (21, GPIO_PULLUP_ONLY);GPIO割り込み処理
ピンの入力信号の変化を検出するために、そのステータスを定期的にポーリングできますが、これはいくつかの理由から最善の解決策ではありません。まず、チェックを繰り返して、CPU時間を無駄にする必要があります。次に、ポーリングの時点で、遅延のためにピンの状態が関係しなくなっている可能性があり、入力信号をスキップできます。これらの問題の解決策は中断です。中断はドアベルのようなものです。鳴らさずに、誰かがドアにいるかどうかを定期的にチェックする必要があります。ソースコードでは、ピンが信号の値を変更したときに呼び出される割り込みコールバック関数を定義できます。次のパラメータを設定することで、ハンドラが呼び出される原因を特定することもできます。
- 無効-信号が変化しても中断を引き起こしません。
- PosEdge-低から高に変更するときに割り込みハンドラーを呼び出します。
- NegEdge-高から低に変更するときに割り込みハンドラーを呼び出します。
- AnyEdge-低から高に変更するとき、または高から低に変更するときに、割り込みハンドラーを呼び出します。

割り込みハンドラーは、コンパイル時にRAMにロードするようにマークできます。デフォルトでは、生成されたコードはフラッシュメモリにあります。事前にIRAM_ATTRとしてマークしておくと、RAMからすぐに実行できるようになります。
void IRAM_ATTR my_gpio_isr_handle(void *arg) {...}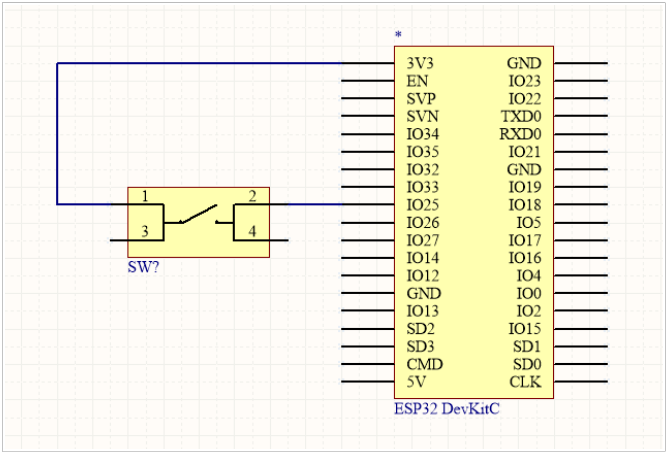
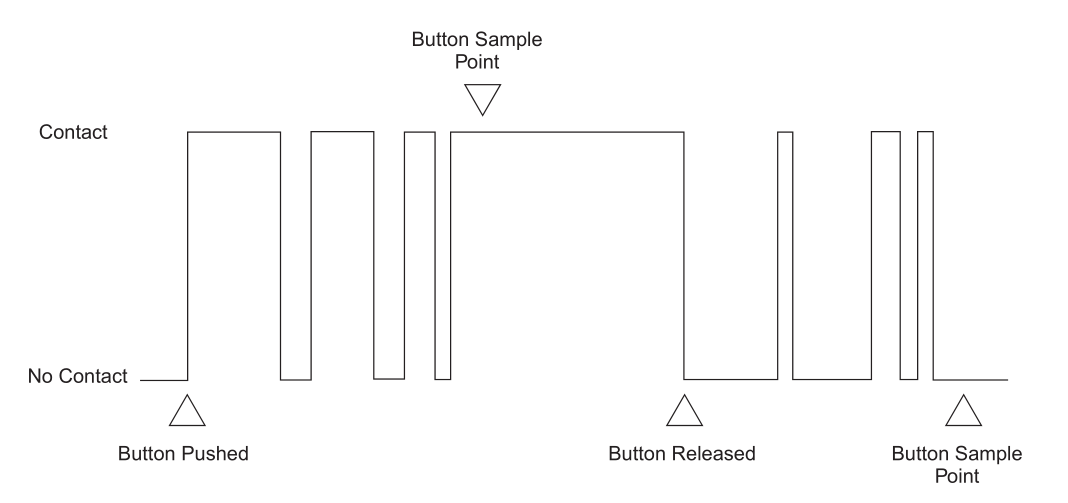
マイクロメータを使用したことがある人は、ボタンからの入力信号の処理にはコンタクトバウンスが伴うことを知っています。これは一連の遷移、したがって一連の割り込みハンドライベントとして解釈できます。これを行うには、連絡先バウンス処理をコードに追加する必要があります。これを行うには、元のイベントを読み取り、振動が収まるまで待ってから、入力状態を再サンプリングする必要があります。
次の例は、入力信号の割り込み処理を示しています。まだ慣れていない場合は、コードをさらに理解するために、FreeRTOSのキュー管理に精通することを強くお勧めします。この例は、2つのタスクを示しています。
- test1_taskは、ピン25で信号がアクティブ化され、「クリックを登録しました」というメッセージがコンソールに1回表示されたときに、割り込みイベントが発生するとロックが解除されます。
- test2_taskは定期的にポーリングされ、ピン26の信号がアクティブになると、「GPIO 26がハイです!」というメッセージが100ミリ秒ごとにコンソールに出力されます。
この例には、ソフトウェアタイマーxTimerも設定されています。この場合、非同期遅延の例としてではなく、オプションです。
アンチバウンスは、timeval_durationBeforeNow関数を使用して実行されます。この関数は、プレスが100ミリ秒以上続くかどうかをチェックします。他にもバウンス防止ソフトウェアのパターンがありますが、意味はほぼ同じです。ESP-IDFには、 GPIOの動作例も含まれています。
入力信号処理
#include <stdio.h>
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "driver/gpio.h"
#include "esp_log.h"
#include "freertos/queue.h"
#include "c_timeutils.h"
#include "freertos/timers.h"
static char tag[] = "test_intr";
static QueueHandle_t q1;
TimerHandle_t xTimer;
#define TEST_GPIO (25)
static void handler(void *args) {
gpio_num_t gpio;
gpio = TEST_GPIO;
xQueueSendToBackFromISR(q1, &gpio, NULL);
}
void test1_task(void *ignore) {
struct timeval lastPress;
ESP_LOGD(tag, ">> test1_task");
gpio_num_t gpio;
q1 = xQueueCreate(10, sizeof(gpio_num_t));
gpio_config_t gpioConfig;
gpioConfig.pin_bit_mask = GPIO_SEL_25;
gpioConfig.mode = GPIO_MODE_INPUT;
gpioConfig.pull_up_en = GPIO_PULLUP_DISABLE;
gpioConfig.pull_down_en = GPIO_PULLDOWN_ENABLE;
gpioConfig.intr_type = GPIO_INTR_POSEDGE;
gpio_config(&gpioConfig);
gpio_install_isr_service(0);
gpio_isr_handler_add(TEST_GPIO, handler, NULL);
while(1) {
//ESP_LOGD(tag, "Waiting on queue");
BaseType_t rc = xQueueReceive(q1, &gpio, portMAX_DELAY);
//ESP_LOGD(tag, "Woke from queue wait: %d", rc);
struct timeval now;
gettimeofday(&now, NULL);
if (timeval_durationBeforeNow(&lastPress) > 100) {
if(gpio_get_level(GPIO_NUM_25)) {
ESP_LOGD(tag, "Registered a click");
if( xTimerStart( xTimer, 0 ) != pdPASS ) {
// The timer could not be set into the Active state.
}
}
}
lastPress = now;
}
vTaskDelete(NULL);
}
void test2_task(void *ignore) {
gpio_set_direction(GPIO_NUM_26, GPIO_MODE_INPUT);
gpio_set_pull_mode(GPIO_NUM_26, GPIO_PULLDOWN_ONLY);
while(true) {
if(gpio_get_level(GPIO_NUM_26)) {
ESP_LOGD(tag, "GPIO 26 is high!");
if( xTimerStart( xTimer, 0 ) != pdPASS ) {
// The timer could not be set into the Active state.
}
}
vTaskDelay(100/portTICK_PERIOD_MS);
}
}
void vTimerCallback( TimerHandle_t pxTimer ) {
ESP_LOGD(tag, "The timer has expired!");
}
void app_main(void)
{
xTaskCreate(test1_task, "test_task1", 5000, NULL, 8, NULL);
xTaskCreate(test2_task, "test_task2", 5000, NULL, 8, NULL);
xTimer = xTimerCreate("Timer", // Just a text name, not used by the kernel.
2000/portTICK_PERIOD_MS, // The timer period in ticks.
pdFALSE, // The timers will auto-reload themselves when they expire.
( void * ) 1, // Assign each timer a unique id equal to its array index.
vTimerCallback // Each timer calls the same callback when it expires.
);
}
PCNT(パルスカウンター)
PCNT(パルスカウンター) モジュールは、入力信号の立ち上がりエッジおよび/または立ち下がりエッジの数をカウントするように設計されています。モジュールの各ブロックには、16ビットの符号付きレジスタと、カウンタ値を増減するように構成できる2つのチャネルがあります。各チャネルには、信号の変化をキャプチャする入力信号と、カウントを有効または無効にするために使用できる制御入力があります。入力には、不要な信号スパイクを排除するために使用できる追加のフィルターがあります。
PCNTカウンターには、0から7までの番号が付けられた8つの独立したユニットがあります。APIでは、pcnt_unit_tを使用して指定されます。各モジュールには、pcnt_channel_tで示される0と1の番号が付けられた2つの独立したチャネルがあります。
構成は、pcnt_config_tを使用してデバイスチャネルごとに個別に提供され、以下をカバーします。
- この構成が属するユニット番号とチャネル番号。
- パルス入力およびゲート入力GPIO番号。
- 制御信号の状態に応じてカウンタがどのように反応するか、および立ち上がりエッジ/立ち下がりエッジがどのようにカウントされるかを定義する、2組のパラメータpcnt_ctrl_mode_tとpcnt_count_mode_t。
- ウォッチポイントを設定し、パルスカウンターが特定の制限に達したときに割り込みをトリガーするために使用される2つの制限値(最小/最大)。
次に、特定のチャネルの構成は、上記のpcnt_config_t構成構造を入力パラメーターとして使用してpcnt_unit_config()関数を呼び出すことによって行われます。
構成でパルスまたは制御入力を無効にするには、GPIO番号の代わりにPCNT_PIN_NOT_USEDを指定する必要があります。
pcnt_unit_config()で構成した後、カウンターはすぐに実行を開始します。累積されたカウンター値は、pcnt_get_counter_value()を呼び出すことで確認できます。
次の関数を使用すると、カウンター操作を制御できます。pcnt_counter_pause()、pcnt_counter_resume()、およびpcnt_counter_clear()
pcnt_set_mode()を呼び出して、pcnt_unit_config()を使用して以前に設定したカウンターモードを動的に変更することもできます。
必要に応じて、pcnt_set_pin()を使用して、パルス入力ピンと制御入力ピンをオンザフライで変更できます。
PCNTモジュールには、パルス入力と制御入力のそれぞれにフィルターがあり、信号の短いスパイクを無視する機能が追加されています。無視されるパルスの長さは、pcnt_set_filter_value()を呼び出すことにより、APB_CLKクロックサイクルで提供されます。現在のフィルター設定は、pcnt_get_filter_value()で確認できます。 APB_CLKサイクルは80MHzで動作します。
pcnt_filter_enable()/ pcnt_filter_disable()を呼び出すことにより、フィルターが開始/一時停止されます。
pcnt_evt_type_tで定義されている次のイベントは、割り込みをトリガーできます。このイベントは、パルスカウンターが特定の値に達したときに発生します。
- : counter_l_lim counter_h_lim, pcnt_config_t;
- 0 1, pcnt_set_event_value ().
- = 0
上記のイベントの割り込みを登録、有効化、または無効化するには、pcnt_isr_register()、pcnt_intr_enable()、およびpcnt_intr_disable()を呼び出す必要があります。しきい値に達したときにイベントを有効または無効にするには、pcnt_event_enable()およびpcnt_event_disable()も呼び出す必要があります。
現在設定されているしきい値を確認するには、pcnt_get_event_value()関数を使用します。
ESP-IDFの例をここに示します。
PCNTカウンターを使用してホイール速度を計算しました。これを行うには、1回転あたりのパルス数をカウントしてから、カウンターをリセットする必要があります。
サンプルコード
typedef struct {
uint16_t delay; //delay im ms
int pin;
int ctrl_pin;
pcnt_channel_t channel;
pcnt_unit_t unit;
int16_t count;
} speed_sensor_params_t;
esp_err_t init_speed_sensor(speed_sensor_params_t* params) {
/* Prepare configuration for the PCNT unit */
pcnt_config_t pcnt_config;
// Set PCNT input signal and control GPIOs
pcnt_config.pulse_gpio_num = params->pin;
pcnt_config.ctrl_gpio_num = params->ctrl_pin;
pcnt_config.channel = params->channel;
pcnt_config.unit = params->unit;
// What to do on the positive / negative edge of pulse input?
pcnt_config.pos_mode = PCNT_COUNT_INC; // Count up on the positive edge
pcnt_config.neg_mode = PCNT_COUNT_DIS; // Keep the counter value on the negative edge
pcnt_config.lctrl_mode = PCNT_MODE_REVERSE; // Reverse counting direction if low
pcnt_config.hctrl_mode = PCNT_MODE_KEEP; // Keep the primary counter mode if high
pcnt_config.counter_h_lim = INT16_MAX;
pcnt_config.counter_l_lim = - INT16_MAX;
/* Initialize PCNT unit */
esp_err_t err = pcnt_unit_config(&pcnt_config);
/* Configure and enable the input filter */
pcnt_set_filter_value(params->unit, 100);
pcnt_filter_enable(params->unit);
/* Initialize PCNT's counter */
pcnt_counter_pause(params->unit);
pcnt_counter_clear(params->unit);
/* Everything is set up, now go to counting */
pcnt_counter_resume(params->unit);
return err;
}
int32_t calculateRpm(speed_sensor_params_t* params) {
pcnt_get_counter_value(params->unit, &(params->count));
int32_t rpm = 60*(1000/params->delay)*params->count/PULSE_PER_TURN;
pcnt_counter_clear(params->unit);
return rpm;
}
MCPWMモジュールを使用したパルス幅変調(PWM)
モジュールに関する情報はここに表示されます。特にArduinoに関連して検索する場合
は、PWMのトピックに関する多くの記事がネット上にあります。
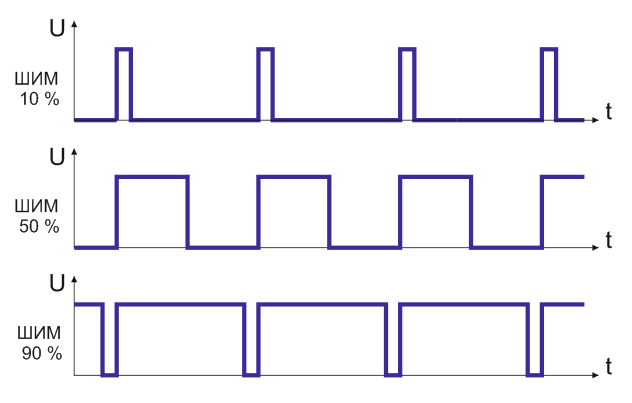
ウィキペディアでは、短く簡潔な定義(パルス幅変調(PWM))を示しています。これは、デバイスをオン/オフすることによって電力を制御するプロセスです。 PWM制御の原理は、信号の一定の振幅と周波数でパルス幅を変更することです。
ArduinoのPWM周波数は488.28Hz、分解能は8ビット(0 ... 255)で、6つのハードウェアピン3、5、6、9、10、11を使用できます。ただし、AVRマイクロコントローラーのレジスタ設定を使用すると、他の値を実現できます。 PWM周波数。
ESP32マイクロプロセッサには、個別のMCPWMモジュール、または2つのモジュールがあり、それぞれに3対のPWMピンがあります。
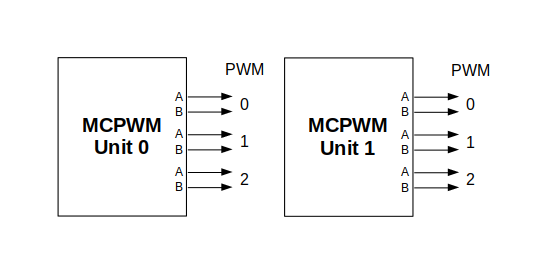
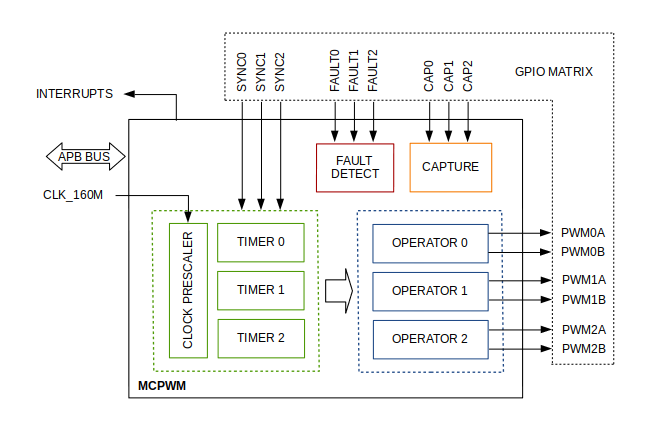
さらに、ドキュメントでは、個別のブロックの出力はPWMxA / PWMxBとマークされています。
MCPWMブロックのより詳細なブロック図を以下に示します。各A / Bペアは、タイマー0、1、および2の3つのタイマーのいずれかと同期できます。同じタイマーを使用して、PWM出力の複数のペアを同期できます。各ユニットは、同期信号などの入力データを収集し、過電流やモーター過電圧などのアラームを検出し、ローター位置などのキャプチャ信号でフィードバックを受信することもできます。
構成の範囲は、モーターのタイプ、特に必要な出力と入力の数、およびモーターを制御するための信号のシーケンスによって異なります。
この例では、利用可能なMCPWMリソースの一部のみを使用するブラシ付きDCモーターを駆動するための簡単な構成について説明します。回路例を以下に示します。モーター(M)に供給される電圧の分極を切り替え、モーターを駆動するのに十分な電流を供給するためのHブリッジが含まれています。

構成には、次の手順が含まれます。
- モーターの駆動に使用されるMPWnブロックの選択。eSP32ボードには、mcpwm_unit_tにリストされているモジュールから2つのモジュールがあります。
- mcpwm_gpio_init()を呼び出して、選択したモジュールの出力として2つのGPIOを初期化します。2つの出力信号は通常、モーターを右または左に駆動するために使用されます。使用可能なすべての信号パラメーターは、mcpwm_io_signals_tにリストされています。一度に複数のピンを設定するには、mcpwm_set_pin()関数をmcpwm_pin_config_tと一緒に使用します。
- タイマーの選択。デバイスで使用可能な3つのタイマーがあります。タイマーはmcpwm_timer_tにリストされています。
- mcpwm_config_t構造でタイマー周波数とブートストラップを設定します。
- 上記のパラメータを使用してmcpwm_init()を呼び出します。
PWM制御方法は次のとおりです。
- mcpwm_set_signal_high () mcpwm_set_signal_low (). . A B .
- — , mcpwm_start () mcpwm_stop (). .
- , mcpwm_set_duty () . mcpwm_set_duty_in_us (), . mcpwm_get_duty (). , mcpwm_set_duty_type (). A B mcpwm_generator_t. . mcpwm_init (), , mcpwm_duty_type_t.
ブラシをかけたモーターのコードの例を次に示します。
私のプロジェクトでは、実際に例のコードを使用して、わずかに修正し、2番目のモーターコントロールを追加しました。PWMチャネルを独立して制御するには、MCPWM_TIMER_0やCPWM_TIMER_1など、それぞれに個別のタイマーを設定する必要があります。
サンプルコード
void mcpwm_example_gpio_initialize(void)
{
mcpwm_gpio_init(MCPWM_UNIT_0, MCPWM0A, GPIO_PWM0A_OUT);
mcpwm_gpio_init(MCPWM_UNIT_0, MCPWM0B, GPIO_PWM0B_OUT);
mcpwm_gpio_init(MCPWM_UNIT_0, MCPWM1A, GPIO_PWM1A_OUT);
mcpwm_gpio_init(MCPWM_UNIT_0, MCPWM1B, GPIO_PWM1B_OUT);
//mcpwm_gpio_init(MCPWM_UNIT_0, MCPWM_SYNC_0, GPIO_SYNC0_IN);
mcpwm_config_t pwm_config;
pwm_config.frequency = 1000; //frequency = 500Hz,
pwm_config.cmpr_a = 0; //duty cycle of PWMxA = 0
pwm_config.cmpr_b = 0; //duty cycle of PWMxb = 0
pwm_config.counter_mode = MCPWM_UP_COUNTER;
pwm_config.duty_mode = MCPWM_DUTY_MODE_0;
mcpwm_init(MCPWM_UNIT_0, MCPWM_TIMER_0, &pwm_config); //Configure PWM0A & PWM0B with above settings
mcpwm_init(MCPWM_UNIT_0, MCPWM_TIMER_1, &pwm_config); //Configure PWM0A & PWM0B with above settings
// deadtime (see clock source changes in mcpwm.c file)
mcpwm_deadtime_enable(MCPWM_UNIT_0, MCPWM_TIMER_0, MCPWM_BYPASS_FED, 80, 80); // 1us deadtime
mcpwm_deadtime_enable(MCPWM_UNIT_0, MCPWM_TIMER_1, MCPWM_BYPASS_FED, 80, 80);
}
WI-Fiに接続してMQTTを操作する
Wi-FIプロトコルのトピックは非常に広範囲です。プロトコルを説明するには、一連の個別の記事が必要になります。公式ガイドでは、Wi-Fiドライバーのセクションを参照してください。ソフトウェアAPIの説明はこちらです。コード例はここで見ることができます
Wi-Fiライブラリは、ESP32Wi-Fiネットワーキング機能の構成と監視をサポートします。次の構成を使用できます。
- ( STA Wi-Fi). ESP32 .
- AP ( Soft-AP ). ESP32.
- AP-STA (ESP32 , ).
- (WPA, WPA2, WEP . .)
- ( ).
- Wi-Fi IEEE802.11.
MQTT
ここまたはここで トピックに精通することができます。例を含むESP-IDFマニュアルはこちらです。
コードでMQTTを設定するには、最初にWi-Fiネットワークに接続する必要があります。次に、ブローカーへの接続を確立します。メッセージはコールバックで処理され、そのパラメーターはesp_mqtt_event_handle_tイベントです。イベントタイプがMQTT_EVENT_DATAの場合、トピックとデータを解析できます。接続、切断、トピックサブスクリプションが成功した結果として、さまざまな動作をカスタマイズできます。
Wi-Fi接続の例:
tcpip_adapter_init();
wifi_event_group = xEventGroupCreate();
ESP_ERROR_CHECK(esp_event_loop_create_default());
ESP_ERROR_CHECK(esp_event_handler_register(WIFI_EVENT, ESP_EVENT_ANY_ID, &wifi_event_handler, NULL));
ESP_ERROR_CHECK(esp_event_handler_register(IP_EVENT, IP_EVENT_STA_GOT_IP, &ip_event_handler, NULL));
wifi_init_config_t cfg = WIFI_INIT_CONFIG_DEFAULT();
ESP_ERROR_CHECK( esp_wifi_init(&cfg) );
ESP_ERROR_CHECK( esp_wifi_set_storage(WIFI_STORAGE_RAM) );
ESP_ERROR_CHECK( esp_wifi_set_mode(WIFI_MODE_STA) );
wifi_config_t sta_config = {
.sta = {
.ssid = CONFIG_ESP_WIFI_SSID,
.password = CONFIG_ESP_WIFI_PASSWORD,
.bssid_set = false
}
};
ESP_ERROR_CHECK( esp_wifi_set_config(WIFI_IF_STA, &sta_config) );
ESP_LOGI(TAG, "start the WIFI SSID:[%s] password:[%s]", CONFIG_ESP_WIFI_SSID, "******");
ESP_ERROR_CHECK( esp_wifi_start() );
ESP_LOGI(TAG, "Waiting for wifi");
xEventGroupWaitBits(wifi_event_group, BIT0, false, true, portMAX_DELAY);
//MQTT init
mqtt_event_group = xEventGroupCreate();
mqtt_app_start(mqtt_event_group);
MQTTブローカーへの接続
void mqtt_app_start(EventGroupHandle_t event_group)
{
mqtt_event_group = event_group;
const esp_mqtt_client_config_t mqtt_cfg = {
.uri = "mqtt://mqtt.eclipse.org:1883", //mqtt://mqtt.eclipse.org:1883
.event_handle = mqtt_event_handler,
.keepalive = 10,
.lwt_topic = "esp32/status/activ",
.lwt_msg = "0",
.lwt_retain = 1,
};
ESP_LOGI(TAG, "[APP] Free memory: %d bytes", esp_get_free_heap_size());
client = esp_mqtt_client_init(&mqtt_cfg);
esp_mqtt_client_start(client);
MQTTハンドラー
esp_err_t mqtt_event_handler(esp_mqtt_event_handle_t event)
{
esp_mqtt_client_handle_t client = event->client;
int msg_id;
command_t command;
// your_context_t *context = event.context;
switch (event->event_id) {
case MQTT_EVENT_CONNECTED:
xEventGroupSetBits(mqtt_event_group, BIT1);
ESP_LOGI(TAG, "MQTT_EVENT_CONNECTED");
msg_id = esp_mqtt_client_subscribe(client, "esp32/car/#", 0);
msg_id = esp_mqtt_client_subscribe(client, "esp32/camera/#", 0);
ESP_LOGI(TAG, "sent subscribe successful, msg_id=%d", msg_id);
break;
case MQTT_EVENT_DISCONNECTED:
ESP_LOGI(TAG, "MQTT_EVENT_DISCONNECTED");
break;
case MQTT_EVENT_SUBSCRIBED:
ESP_LOGI(TAG, "MQTT_EVENT_SUBSCRIBED, msg_id=%d", event->msg_id);
msg_id = esp_mqtt_client_publish(client, "esp32/status/activ", "1", 0, 0, 1);
ESP_LOGI(TAG, "sent publish successful, msg_id=%d", msg_id);
break;
case MQTT_EVENT_UNSUBSCRIBED:
ESP_LOGI(TAG, "MQTT_EVENT_UNSUBSCRIBED, msg_id=%d", event->msg_id);
break;
case MQTT_EVENT_PUBLISHED:
ESP_LOGI(TAG, "MQTT_EVENT_PUBLISHED, msg_id=%d", event->msg_id);
break;
case MQTT_EVENT_DATA:
ESP_LOGI(TAG, "MQTT_EVENT_DATA");
printf("TOPIC=%.*s\r\n", event->topic_len, event->topic);
printf("DATA=%.*s\r\n", event->data_len, event->data);
memset(topic, 0, strlen(topic));
memset(data, 0, strlen(data));
strncpy(topic, event->topic, event->topic_len);
strncpy(data, event->data, event->data_len);
command_t command = {
.topic = topic,
.message = data,
};
parseCommand(&command);
break;
case MQTT_EVENT_ERROR:
ESP_LOGI(TAG, "MQTT_EVENT_ERROR");
break;
default:
break;
}
return ESP_OK;
}
これで、ESP32モジュールの使用に関する私の話は終わりです。この記事では、モジュールのリソースを最大限に活用するフレームワークとして、ESP-IDFの例を検討しました。javaScript、MicroPython、Luaなどの他のプラットフォームを使用したプログラミングは、関連リソースにあります。次の記事では、すでに述べたように、マイクロプロセッサを使用する実際的な例を示し、ArduinoとESP-IDFのソフトウェアアプローチを比較します。