
ファクトリーディスパッチャーの職場
濃縮プラントは、工業用途に適した技術的に価値のある製品を得るために、固形鉱物を一次処理するための鉱業企業です。
破砕、粉砕、スクリーニング、分類、浮選、シアン化、収着、中和、脱着、電気分解など、工場で行われるさまざまな技術プロセスは、標準的な自動化だけでなく、技術的ビジョンや機械学習の応用にも幅広い分野を残しています。 ..。カットの下で-詳細な説明と多くの大きくて美しい写真。
工場の鳥瞰図工場の各プロセスについて個別の教科書を書くことができますが、私はあらゆる加工工場の仕事の要点にこだわるよう提案します。
供給された鉱石の粒子サイズ分布の測定
オープンピットマイニング(クローズドマイニングはアンダーグラウンドマイニングとも呼ばれます)では、岩盤のサイズは直径1.5mに達することがあります。そのような岩石から鉱物を抽出するために何もすることは無意味であることは明らかであるため、最初のステップは粉砕された材料を準備することです。
したがって、ほとんどすべての工場は鉱石準備部門から始まります。この段階で、鉱石は破砕と粉砕の段階を経て、技術的プロセスで許容できる割合になります。
youtu.be/itq6wBZND5k

現段階では、粉砕と粉砕の各段階の後、鉱石の粒子サイズ組成を制御するためのシステムがすでに積極的に使用されています。鉱石の準備段階が最もエネルギーを消費するプロセスであり、埋め戻し(材料の詰まり)による停止は、文字通り工場全体で何時間ものダウンタイムを伴うため、このタスクは非常に重要です。
マシンビジョンアルゴリズムは、マシンラーニングと組み合わせて、プロセスフローにとって危険な可能性のある鉱石ストリーム内の大きな含有物を認識します。大きなオブジェクトを検出して分類した後、アルゴリズムは写真とビデオの記録を使用して情報信号を生成するか、信号を制御して、コンベヤー全体を停止します。

鉱石の粒子サイズ決定プロセスの視覚化
コンベヤーベルトの完全性の監視
重力と分類は一般的な技術プロセスであり、その結果、鉱石はサイズまたは組成によって異なるストリームに分離されます。これらのプロセスは重力の使用に基づいており、鉱物は密度と粒子サイズの違いにより廃石から分離されます。
コンベヤーは、作業材料をコンパートメントからコンパートメントに移動することに直接関与します。一般的に言って、コンベヤーは使用するのに最も信頼できる機器ではありません。しかし、最近の技術と新しいコンベヤー装置の傾向は、コンベヤーシステムが適切な取り扱いとメンテナンスを伴う採掘作業において非常に効率的である可能性があることを示しています。

コンベヤーベルトの欠陥
テープの整合性を監視する問題を解決するために、さまざまなアプローチが使用されます。無線信号に基づく単純なアプローチから、マシンビジョンを使用するトレーニング可能なMLシステムまでです。アルゴリズムは、ビデオストリーム内のローカルテープウェブの欠陥、裂け目、切り傷、および変位を検出および分類するようにトレーニングされています。
鉱石汚染体の検出
記事の最初の部分で わかったように、鉱業の重要で非常に緊急の問題は、高価な生産設備を壊れない金属体から保護することです-掘削機の歯、裏地の破片、その他の強力な要素は、鉱石と一緒に破砕設備に入ると、確かにそれを無効にします。 ..。
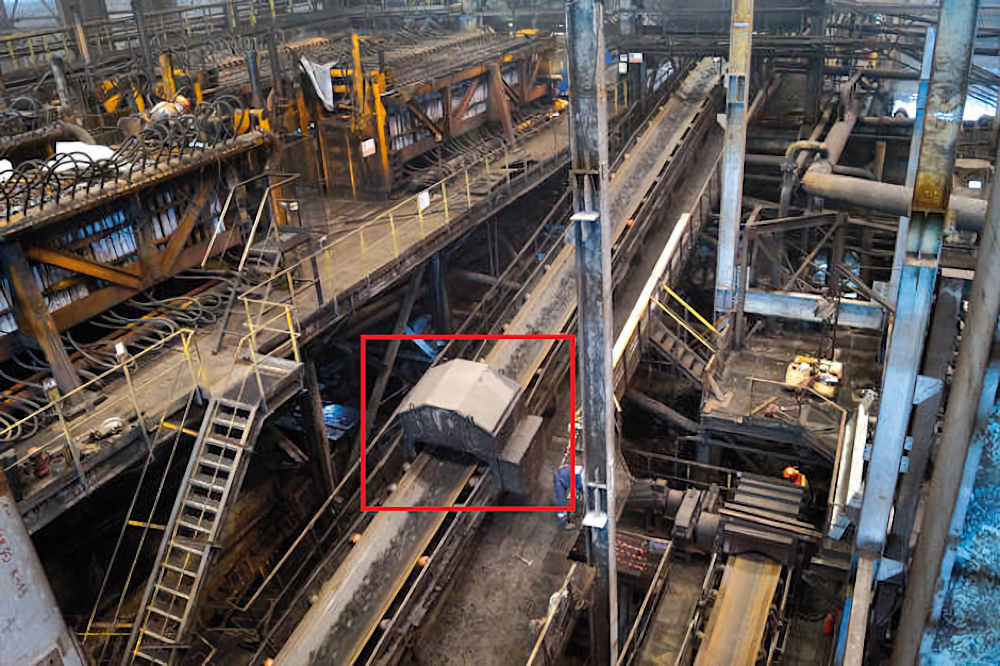
制御ユニット
この問題を解決するために、さまざまな解決策が使用されます。鉱石の流れに関するコンピュータービジョンから、特殊なソフトウェア、輸送された材料の電磁照射後の記録信号の数学的処理までです。
このようなハードウェアおよびソフトウェアシステムの操作は、ソフトウェア分類子の使用に基づいており、ビデオストリーム内のテープ上のオブジェクトが識別および分離されます。監視に使用するカメラが厳密に上から見ている場合は、通常、分類器を使用して異物を検出します。メソッドを開発する過程で、MLスペシャリストは、標準的な鉱石の流れと汚染された鉱石の流れを示す履歴データに基づいて分類器をトレーニングします。分類器からのデータを検出に使用するアルゴリズムは、より正確な結果を提供します。
いずれにせよ、最も奇妙な形の岩片が常にフレームに現れる可能性があるため、誤検知の可能性は残りますが、モデルの追加のトレーニングによって減少します。最高の検出および分類精度は、金属検出器および無線センサーからのデータをアルゴリズムに含めることによって達成されます。
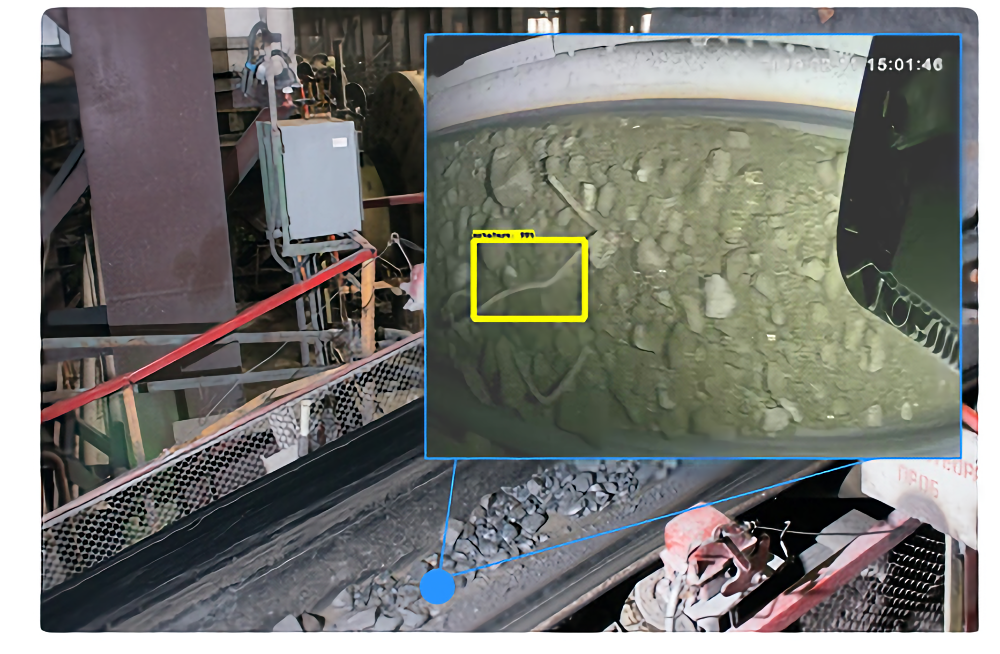
コンベヤーベルト上の異物
色と形によるダイヤモンドの分類
Alrosaの企業は、MLおよびCVアルゴリズムに基づいて、色と形状によってダイヤモンドを分類するプロジェクトを成功裏に実施しました。
マシンビジョンカメラは、自由落下で動くダイヤモンドをキャプチャします。分類は、このタスクのために特別に開発された機械学習方法とビデオ分析アルゴリズムを使用して作成されたモデルに基づいて実行されます。選別速度は、空気圧を使用して毎秒最大20ダイヤモンドです。

浮選の品質と速度の測定
浮選(フロッターからフロートへ)は、鉱物が界面に保持する能力の違いと特定の表面エネルギーの違いに基づく、鉱物処理の方法の1つです。
簡単に言えば、鉱石が粉末に粉砕された後、それは水と特別な試薬と混合され、その後、強い空気の流れが混合物を通過します。このプロセス中に気泡が形成され、その表面にいくつかの材料が保持され、他の材料が沈殿します。

クローズアップ浮揚
浮選は、鉱業で非常に一般的な製造プロセスです。気泡のサイズ、泡の形成速度、およびその除去は、鉱物の抽出の品質を決定する最も重要な特性です。浮選の結果として得られる材料は浮選濃縮物と呼ばれ、分離された成分は浮選テーリングと呼ばれます。
泡はどのように監視できますか?もちろん、コンピュータービジョンを使用します。泡、その動きの速度と方向は、機械学習アルゴリズムを使用して認識および測定するのがかなり簡単です。
フォームフローの表面に垂直に向けられたステレオカメラを使用すると、バブル層の現在の高さを決定できます。2つ以上の隣接するフレームを比較するアルゴリズムにより、流れの方向とその速度を決定できます。CVアルゴリズムは、フィルターを適用し、泡の輪郭を強調表示することで、泡のサイズを決定し、プロセスの品質を説明するために使用できるヒストグラムを作成できます。

工業規模の浮選プロセス
危険区域の管理とPPEの可用性
産業の安全性のレベルは、すべての現代企業で最も重要な指標です。加工工場などの危険な場所では、安全性が特に注意深く監視されています。すべてのインシデントについて詳細で包括的な統計が保持され、すべての管理者は人員の安全に関連する必須のKPIを持っています。
もちろん、最新のマシンビジョンベースの危険領域制御は、鉱業も免れていません。危険なエリアにいる人員の存在だけでなく、必要なすべての個人用保護具(PPE)(ヘルメット、ゴーグル、マスク、手袋)の可用性も監視されます。

PPEの可用性のビデオ制御
ロードおよびアンロード操作の制御
あらゆるプロダクションで最も危険なタイプの作業の1つは、ロードおよびアンロード作業です。しかし、ここにも、潜在的な危険をオペレーターに通知し、それによって緊急事態の可能性を減らすことができるコンピュータービジョンのアプリケーションがありました。
クレーンブームに取り付けられたカメラは、垂直に下向きになっています。マシンビジョンアルゴリズムは、人を検出して追跡します。危険な(「赤」)ゾーンは、ブームの下のゾーンと、荷物の移動方向のゾーンです。人が「赤い」ゾーンに入ると、アルゴリズムはクレーンのオペレーターに作業を停止するように信号を送ります。さらに、水平線に対する負荷の位置とケーブルへの固定の正確さを決定するサイドカメラがあります。危険なロールが発生した場合、作業を停止するようにオペレーターに信号が送られます。
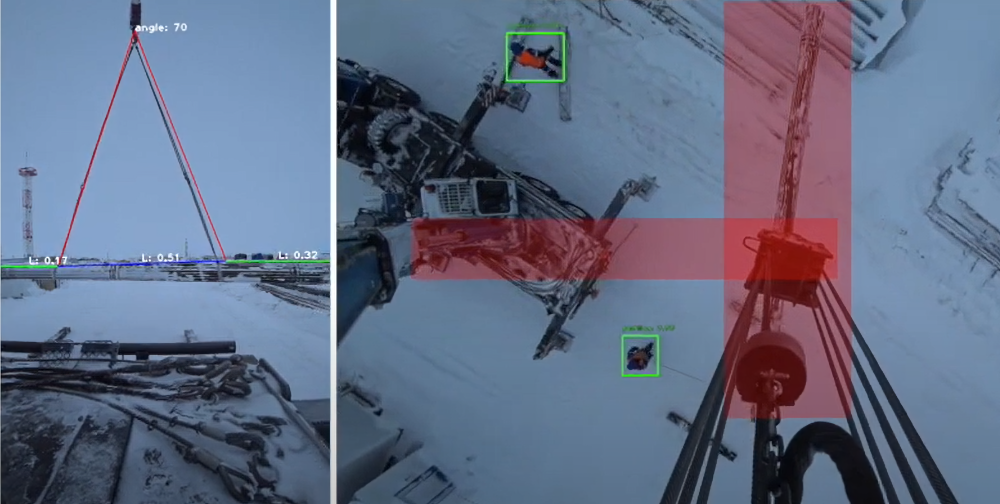
ローディング制御プロセス
技術者のためのスマートアドバイザー
最近、オペレーターやディスパッチャーが技術プロセスのパラメーターを監視し、機器の動作モードの変更やプロセス制御システムのターゲットパラメーター設定の変更に関するアドバイスを提供するのに役立つシステムが人気を集めています。
今日、スマートアドバイザーの産業実装のささやかな試みは単一の実装に限定されており、工場の仕事に関する幅広い専門知識を持っていません。近い将来の課題は、スマートファクトリーを立ち上げることです。
あとがき
この記事には、現在加工工場で使用されているすべての機械学習およびコンピュータービジョンシステムからはほど遠いものが含まれています。高い可能性と解決すべき幅広いタスクが、それらの開発と実装の急速なペースを決定します。
MLおよびCVシステムは、かつての標準的な自動化で起こったように、自信を持って業界に参入したと自信を持って言えます。このようなテクノロジーの実装の制限は、主に大企業に追われている資格のある専門家の不足によるものです。

その他のコース