
こんにちは!
航空機業界での仕事中に、同僚と私は、航空機搭載機器(Hardware-In-the-Loop、HIL)および高速プロトタイピングスタンド(Model-In-the-Loop、MIL)の半自然モデリングスタンドの設計と作成に多くの経験を積み重ねてきました。この出版物は、私たちの経験を1つの出版物に要約する試みです。結果のテキストは非常に詳細であることが判明しましたが、手を上げて何かをカットすることはありません。また、所々短くすると因果関係がなくなる場合があります。それで、それはここで説明されます:
- スタンドの開発とそのサポートを自動化するために使用されるツールについて。
- シミュレーションコンプレックスのソフトウェアとハードウェアについて。
- HILおよびMILスタンドの建設へのアプローチ。
- スタンドの作成をスピードアップし、その近代化と運用を簡素化するさまざまな技術について。
誰が気にする-猫へようこそ。
問題の背景
私たちは、民間航空機業界で豊富な経験を持つエンジニアのグループです。
SSJ-100 Sukhoi Superjet、MC-21、DA-42T、L-410UVP-E20航空機用の車載機器、スタンド、シミュレーターの作成に取り組んでいます。
最初のスタンドから、数万のワイヤー、数十万の信号、および絶えず変化する構造を備えたテストスタンドを構築しようとしている人々のためのガイドラインの欠如に直面しました。昔からの知識への憧れのために、同僚と私はベストプラクティスを共有することにしました。誰かが今私たちのお気に入りのレーキを歩いているとしたらどうでしょうか。
今日見ているように、どのスタンドにも次の機能があります。
- スタンドは、テストオブジェクト、ケーブルネットワーク、シミュレーションコンプレックス、シミュレーションコンプレックス用のソフトウェアなどの機器で構成されます。
- オプションで、コックピットのモックアップ、視覚化システム、制御ローディングシステムなどのデバイス。
- テストオブジェクトは、製品の開発に伴って絶えず変化しています。
- テスト要件は常に変化しています。
- スタンドの技術的な割り当てにはすべての要件が含まれているわけではなく、ほとんどの機能をその場で完了する必要があります。
- テストベンチが本当に役立つためには、テストオブジェクトよりも速く変化する必要があります。
テストサイトの不安定な性質に直面して、私たちは次のことに気づきました。
- スタンドのすべての「鉄」部分(ケーブルネットワーク、コックピットレイアウトなど)は簡単に変更できます。
- イミテーションコンプレックスのアーキテクチャ、モデルおよびシミュレータの構造も簡単に変更および制御する必要があります。
- ツールと開発環境なしでは実現できません。
したがって、シミュレーションコンプレックスの開発ツールとアーキテクチャの説明からプレゼンテーションを開始します。
パート1。開発ツール
このセクションでは、3つの主要なツールのうちの2つ、dBricksソフトウェアとADS2R4シミュレーションソフトウェア環境について説明します。ツールチェーンの3番目の要素であるSimulinkは、おそらく提示および説明する必要はありません。また、これら3つの製品を正しく処理すれば、互いに緊密に統合でき、スタンドの開発プロセスのほとんどを簡素化できることにも注意してください。
- dBricksは、PIRSS LLCによって開発された、航空複合体の開発者向けのロシアのソフトウェアツールです。
- ADS2R4 - TechSATによって開発されたシミュレーションコンプレックスの環境
dBricksは次の目的で使用されます。
- 搭載機器の情報相互作用のためのプロトコルの開発-テストオブジェクト;
- 数学モデルのアーキテクチャの自動形成。
- スタンドのケーブルネットワークの設計文書の作成。
- ADS2R4シミュレーションの複雑な環境の形式で入力と出力を記述する構成ファイルの自動生成。
ADS2R4は、整合性と汎用性の両方の要件を満たすアビオニクスアーキテクチャの開発、テスト、および検証用に特別に設計されたリアルタイムのテストおよびシミュレーションランタイムです。
dBricksツールについて
dBricksは、複雑なアビオニクスの開発と統合を加速するために使用される主要なツールです。このツールは、次の設計データを処理するためのデータベースです。
- 通信プロトコル;
- 構造図と概念図。
- 接続図と表;
- 組立図とハーネステーブル。
- ソフトウェア開発者向けの要件仕様。
このツールを使用すると、次の利点があります。
- データを操作するための単一のツールは、すべての作業結果の互換性を保証します。
- マルチユーザーインターフェイスにより、大規模な分散開発チームが同時に作業できます。
- 接続とソフトウェア構成の組み込み制御。
- 人間が読める形式のさまざまなレポート、表、図、ドキュメント、およびファイルの形式での自動データ出力。
- ADS2システム、ネットワーク機器の構成を含む、機械可読形式での自動データ出力。
- 必要に応じて他のCADシステムとの相互作用。
自動生成されたファイルの形式がプロジェクトの要件に適合していることは明らかです。
dBricksツール自体には、ドキュメントを生成するためのカスタムスクリプトを生成するために使用できるAPIアクセス機能があり、データベースのコンテンツを入力および更新するためにも使用できます。
dBricksを使用すると、スタンド開発者が保証されます。
- 100%手動コピーエラー(「人的要因」)を含まないADS2構成ファイルの高速自動生成。
- スタンドケーブルは、dBrickに格納されているオブジェクト(航空機など)のオンボードケーブルネットワーク上のデータに基づいて開発できます。
dBricksツールのアーキテクチャの詳細
dBricks .
. :
. 1:
. , , .
. 2:
, , : , , .. , .. , . — . , dBricks , , :
, , .. - «» .
dBricks . . .
, . . . .
. :
– . , . , , ( ):
. 3:
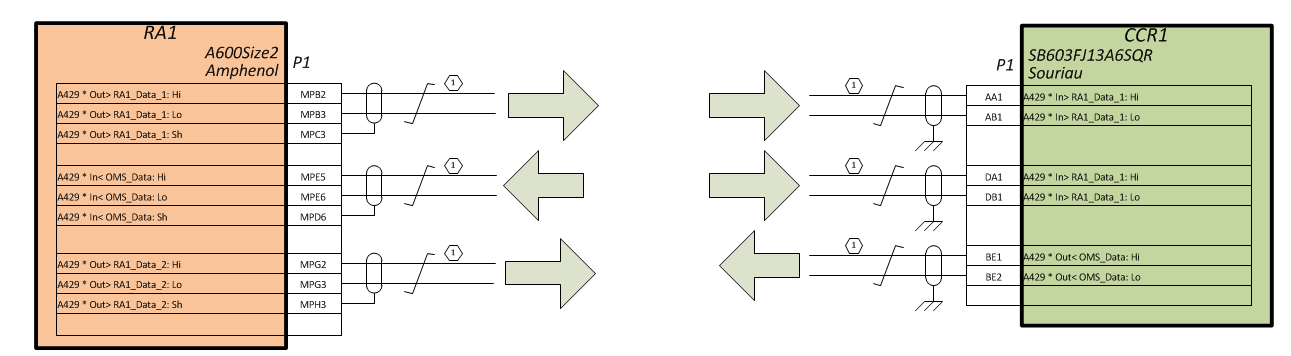
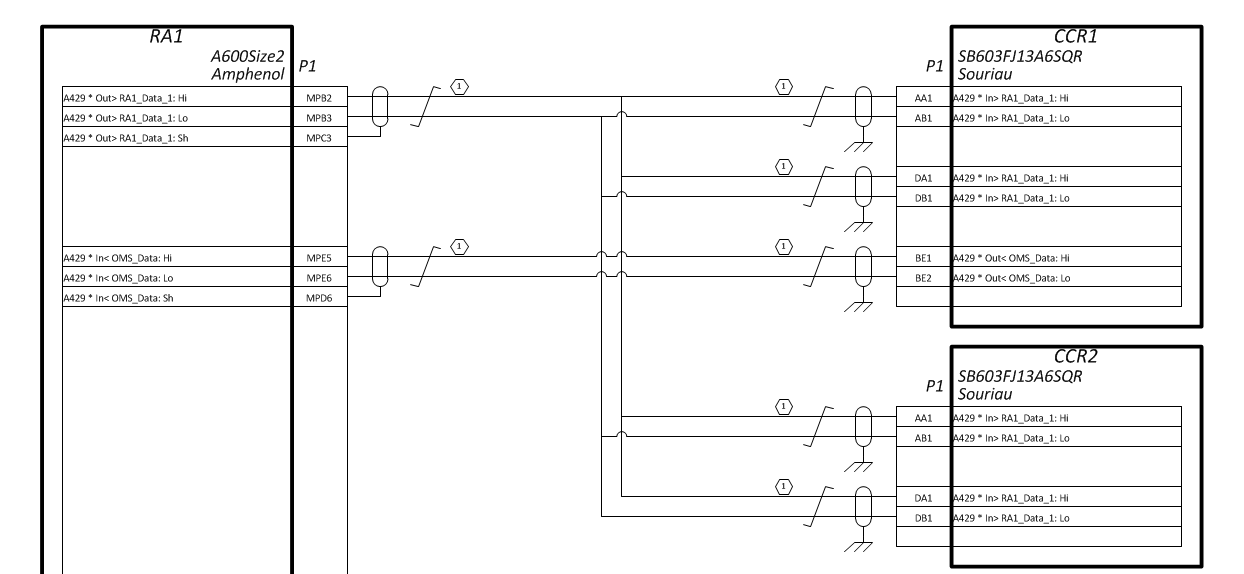
物理レベルでのdBricksでの機器の接続について
dBricks .
. :
- ;
- , , ARINC 429 27;
- : , , ;
- ().
. 1:
. , , .
. 2:
, , : , , .. , .. , . — . , dBricks , , :
- ;
- .
, , .. - «» .
dBricks
dBricks . . .
, . . . .
. :
- ;
- – , ;
- – , , , , ;
- – , , , ..;
– . , . , , ( ):
- dBricks , , ;
- , .. ;
- , . , , , . , , : , , .;
, , (, 32 , 64 ) (, , ). . . - , , , ;
- () (). ( ) ( ).
. 3:
ADS2に基づくシミュレーションコンプレックスについて
ADS2は、TechSATによって開発された、航空宇宙産業における航空電子工学のプロトタイピング、統合、テスト、検証、および検証のための、包括的で適応性の高いソフトウェア環境およびリアルタイムハードウェアプラットフォームです。
ADS2システムの基本構造には、次のコンポーネントが含まれています。
- 特殊なAWP(WindowsまたはLinuxに基づく)、入出力ボード、通信回線切り替えデバイス(OI接続の制御を含む)などを含むハードウェア部分。
- ADS2コアソフトウェア環境は、すべてのADS2コンポーネントを統合する分散リアルタイムシステムです。
- ADS2コアで実行されるデバイスドライバーなどの固有の低レベルハードウェアサポートソフトウェア。
- ADS2グラフィカルシェルモジュールは、オペレーターがADS2システムをリアルタイムで制御できるようにするサービスです。
つまり、ADS2システムの最小必須構成には、ADS2ソフトウェアコア(リアルタイムコンピューターと制御ワークステーション)、任意の標準コンポーネントセット(I / Oボードや対応するドライバーなど)、および顧客が必要とする追加のモジュールと拡張システムが含まれます。
ADS2機器について
一般的なADS2システムは、次の主要コンポーネントで構成されています。
- ADS2 ( Windows Linux). ADS2, , , ADS2.
- , - . :
- ( ADS2)
- - , AFDX, CAN, ARINC 429, MIL-STD-1553 (), RS-485, Ethernet ..
- - - (FAST) , Ethernet (TCP/UDP).
- «Timemaster» ADS2.
基本的なADS2システムは、小さなデスクトップシステムから大きな分散システムまで簡単に拡張できます。ADS2システムの機能を強化したり、構成を変更したりする必要がある場合は、同種のハードウェアおよびソフトウェア環境を使用しているため、システム自体のソフトウェアを変更する必要はありません。スタンド作成の最初にこれを考慮することは非常に重要です。私たちの経験では、運用中にシステム構成を変更する必要が最も不適当な瞬間に発生するため、この側面を過小評価しないでください。
ADS2R4環境アーキテクチャの詳細
ADS2.
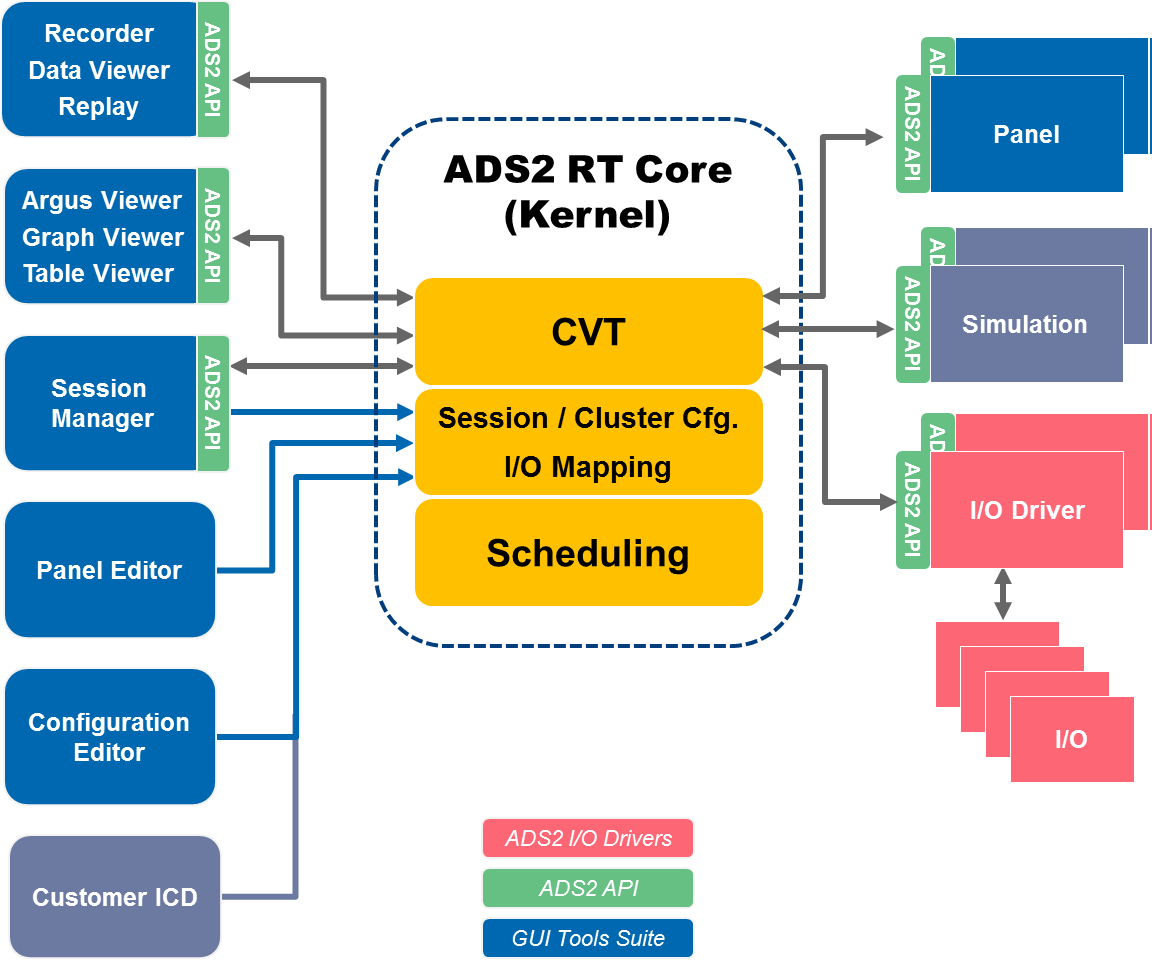
. 4: ADS2
:
CVT – , , , ( ADS2). CVT — , , . CVT CVT — , . CVT , , . :
, CVT, , . CVT , A B. , , , - A, B . A B ; (, , ). , CVT, ( ) . - .
, , . . ADS2 , . CVT, , : , , , , , .
ADS2 CVT . - CVT, - .
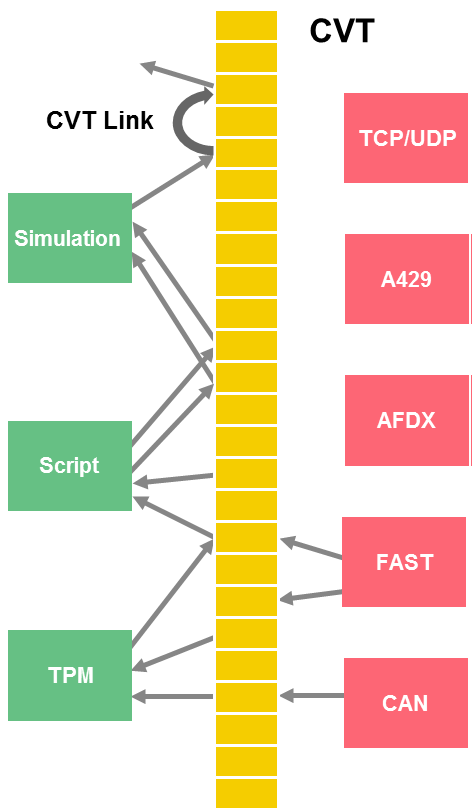
. 5: CVT
ADS2 ( .. ) - (I/O channels). . CVT. CVT - ADS2. (I/O map configuration). ADS2 /:
- :
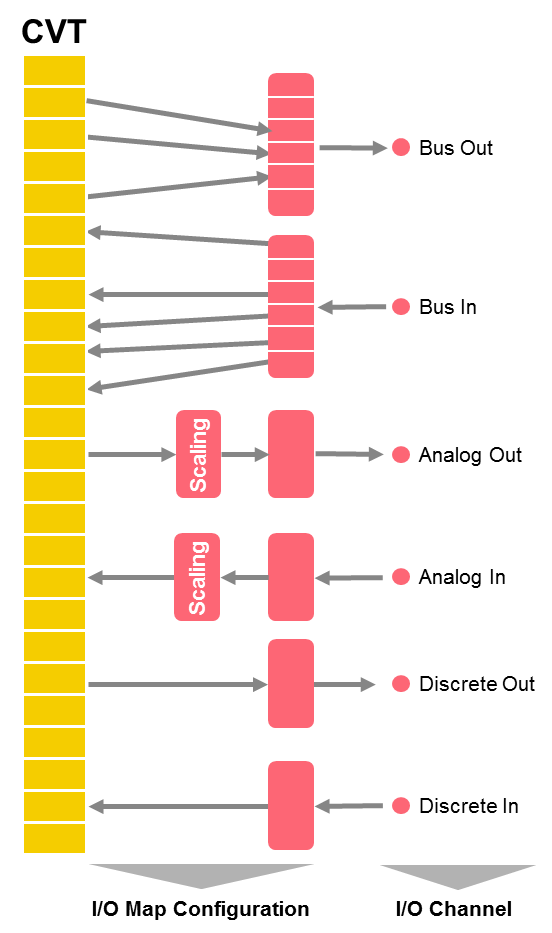
. 6: - ( )
- , CVT . :
dBricks , ADS2:
CVT dBricks.
CVT .
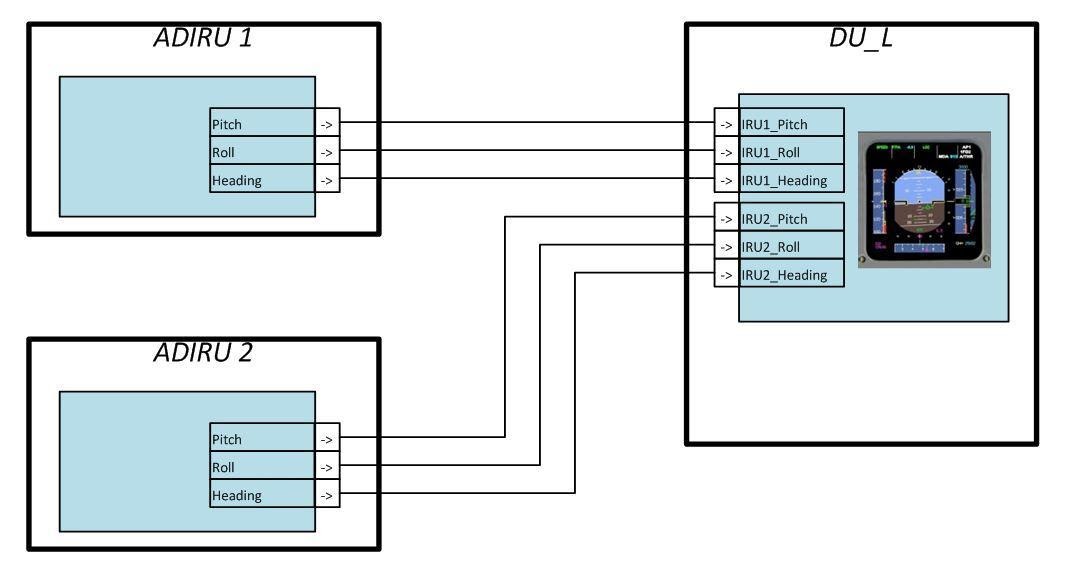
: «Flight Warning Application» «1» :

. 7: CVT
CVT dBricks. , «In_IRU1_Roll» «Flight Warning Application» «Out_Roll_Angle» «Main» «IRU1»:
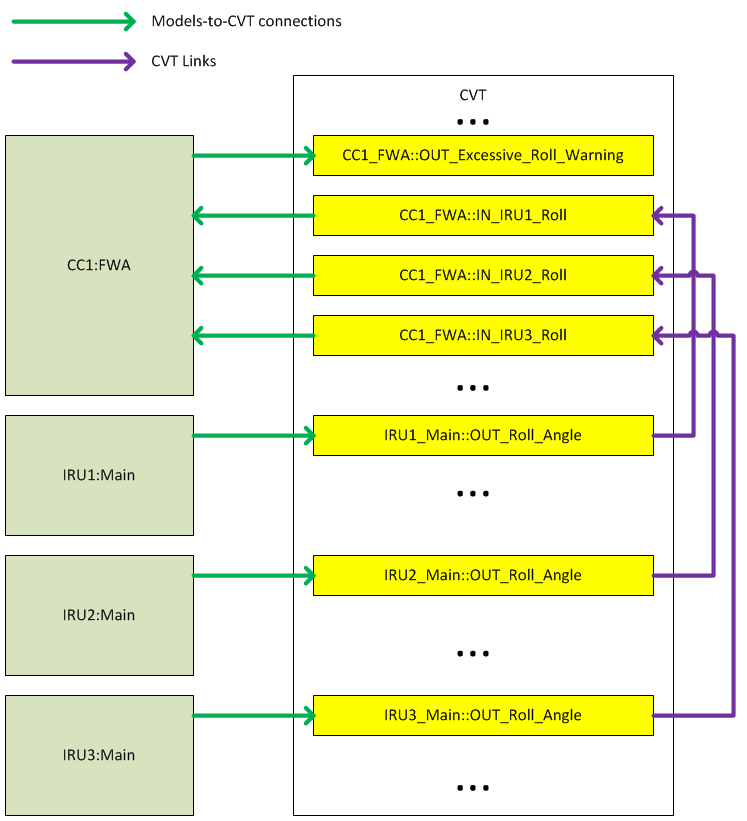
. 8: CVT
/ « » dBricks. , Out_Roll_Angle ARINC429 325, BNR ( ), 11, 14, 90, , 10. -.
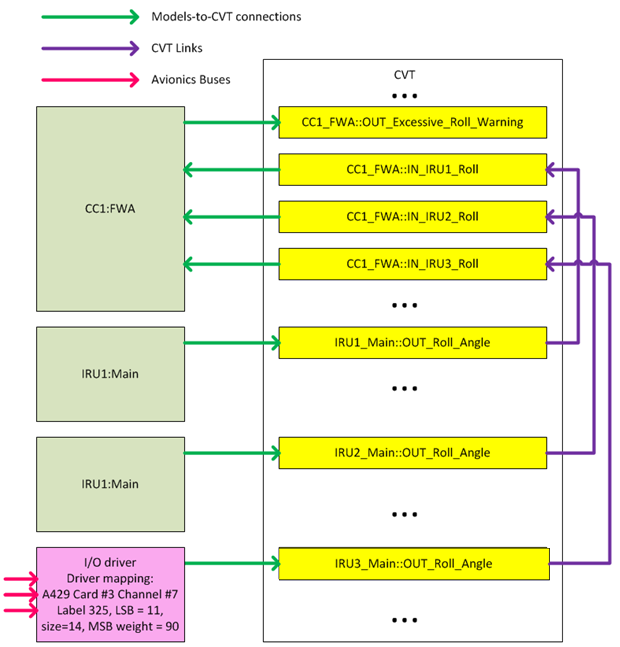
. 9:
, dBricks , ADS2, -, 1 .
CVT CVT. .
ADS2
ADS2.
. 4: ADS2
:
- ADS2 RT Core – , ADS2. ADS2 « » (Current Values Table, CVT) . ADS2 , ADS2 .
- - ADS2 – - , ADS2. - ADS2.
- ADS2 GUI Tools Suite – ADS2, , , , ADS2. : , , ..
- ADS2 API – API , ADS2 -.
CVT
CVT – , , , ( ADS2). CVT — , , . CVT CVT — , . CVT , , . :
- – integer, floating point, string, ;
- – sampling queuing (FIFO);
- – , , , , integer strings.
, CVT, , . CVT , A B. , , , - A, B . A B ; (, , ). , CVT, ( ) . - .
, , . . ADS2 , . CVT, , : , , , , , .
ADS2 CVT . - CVT, - .
. 5: CVT
-
ADS2 ( .. ) - (I/O channels). . CVT. CVT - ADS2. (I/O map configuration). ADS2 /:
- ARINC 429, AFDX, CAN, MIL-STD-1553 (), .. ;
- RS-232, RS-485, RS-422 ..;
- ;
- ;
- Ethernet.
- :
- (, 16- - : );
- (, CVT , CVT, ).
. 6: - ( )
- , CVT . :
- AFDX (ARINC 664);
- ARINC 429;
- CAN (ARINC 825);
- MIL-STD-1553 ();
- ;
- ;
- (RS232, RS422, RS485);
- RVDT/LVDT;
- ;
- , .
dBricks ADS2
dBricks , ADS2:
- CVT;
- CVT;
- -.
CVT dBricks.
CVT .
: «Flight Warning Application» «1» :
- In_IRU1_Roll ( №1)
- In_IRU2_Roll ( №2)
- In_IRU3_Roll ( №3)
- Out_Excessive_Roll_Warning ( )
. 7: CVT
CVT dBricks. , «In_IRU1_Roll» «Flight Warning Application» «Out_Roll_Angle» «Main» «IRU1»:
. 8: CVT
/ « » dBricks. , Out_Roll_Angle ARINC429 325, BNR ( ), 11, 14, 90, , 10. -.
. 9:
, dBricks , ADS2, -, 1 .
CVT CVT. .
ADS2でのSimulinkの使用方法
Simulinkは、航空宇宙産業で広く使用されている強力なソフトウェアツールです。ADS2システムは、コンポーネントのコンピューターモデルを開発するために、Simulinkとの便利で理解しやすい相互作用を実装します。通信プロトコルのデータを格納するためのdBrickの使用と組み合わせて、開発およびデバッグプロセスを大幅に高速化するツールの統合チェーンを作成することが可能です。
SimulinkとADS2の統合の詳細
Simulink ADS2 :
, C++, Windows, Linux. , Windows Linux, .
Simulink :
. , () ( ) . , ( , , ..) . ADS2 . , . Simulink ADS2, . Simulink ADS2, ARINC 429 . , , , (). , , Simulink ADS2. , Simulink Windows, , , , .
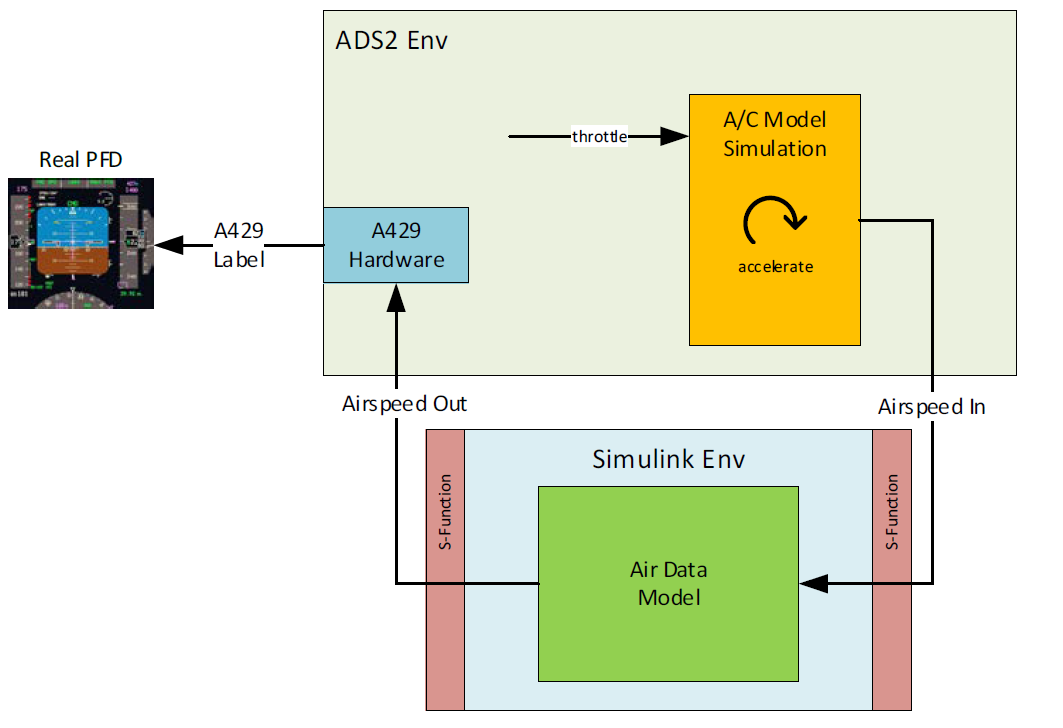
. 10 Simulink ADS2
- ADS2 CVT ADS2, Windows;
- CVT ADS2;
- ADS2 API C++;
- Simulink C++ (S-);
- S- - ;
- S- Simulink.
, C++, Windows, Linux. , Windows Linux, .
Simulink :
- Simulink;
- ( ) S- Simulink;
- - S- . ADS2 S-;
- Simulink. , , S-;
- ADS2 Simulink;
- ;
- C++ Simulink;
- C++ Linux;
- .
. , () ( ) . , ( , , ..) . ADS2 . , . Simulink ADS2, . Simulink ADS2, ARINC 429 . , , , (). , , Simulink ADS2. , Simulink Windows, , , , .
. 10 Simulink ADS2
パート2。スタンド
オンボード機器コンプレックスの半自然モデリングの略(HILテスト)
プログラムの要件に従って、スタンドは次のタスクの1つ、複数、またはすべてを解決できます。
- アビオニクスの開発のサポート。
- パイロットによる閉ループでのテスト、搭載機器のシミュレーターとの相互作用、航空機の飛行ダイナミクスおよび外部条件の模倣を含む、搭載機器の包括的なテスト。
- 運航乗務員による機内設備の運用の初期評価を実施する。
- 起こりうる故障に対する航空電子工学の耐性のテストを含む認証テスト。視界が最小の状態での離陸および着陸モードでの作業、地面への接近モードの作成など。
- 運用文書の作成;
- たとえば、FTDレベル4に対応する技術トレーニング施設でのラインパイロットのトレーニング。
使用する模倣複合体
シミュレーションコンプレックスとして、ADS2システムに基づくソリューションを使用することを提案します。これは、次の機能を提供するためです。
- , ;
- ;
- Simulink ;
- . ;
- ;
- ;
- .
dBricksツールを使用して構成ファイル(構成テーブルとCVTポイント、システムモデル)の自動生成を使用する場合は、ADS2システムに基づくソリューションの使用が最も効果的です。
アビオニクススタンドを開発する際に最も時間のかかる作業の1つは、システムモデルとI / Oボードの構成です。dBricksの場合、このタスクには1時間かかります。実行する必要があるのは、シミュレートされた機器のどのチャネルを担当するADS2 I / Oボードを割り当てることだけです。その後、必要なすべての構成ファイルを自動的に生成できます。
現代の航空機の典型的な模造複合体
| № | |||
| 1 | 3 — 6 | ADS2.
: ADS2; , ..; . |
|
| 2 | 1 | ADS2. Windows.
: ; ; Simulink ; /. |
|
| 3 | 1 — 3 | Windows . . ADS2 UDP . | |
| 4 | - (FAST ADS2) | 1 — 10 | - () |
| 5 | - | 10-40 | - . , . :
|
サードパーティのシミュレーターの統合
一部のシステムベンダーは、自社のノウハウを懸念しており、システムのモデルを作成するために必要なデータの提供を拒否しています。エンジニアは良い例です。通常、エンジンサプライヤは、スタンドを実行するためのシミュレータを提供します。これらのシミュレーターは通常、イーサネットを介して、または最悪の場合、「反射メモリ」などのいくつかの特別なインターフェースを介して中央ベンチシミュレーションシステムに接続されます。いずれの場合も、ADS2は任意のインターフェイスをサポートできます。
, . , (10-15 ) ( , ..). , , , , , , ...
ケーブルネットワークは、スタンドの最も重要なコンポーネントの1つです。ケーブルの設計と製造に使用されるアプローチとツールは、スタンドの設計と製造スケジュールに大きな影響を与える可能性があります。さまざまなプロジェクトでその有効性が証明されているアプローチを使用します。その基本原則は次のとおりです。
- , , 100% . , , :
— ;
— ; - ( ) . :
— ;
— 5 ;
— .

. 11:
- , , , ;
WAGO 2002-1871 ( ) DIN .
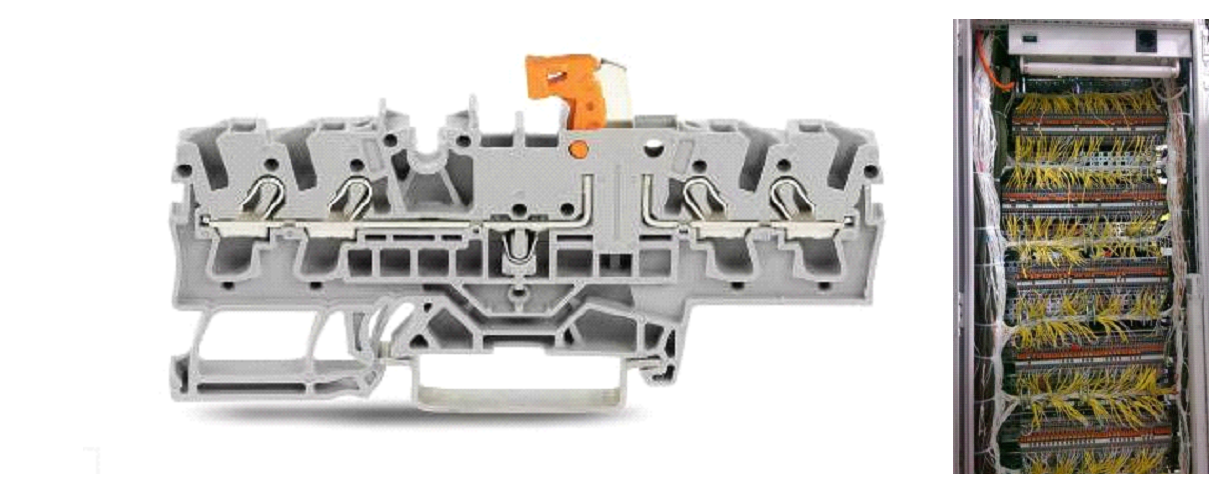
. 12: WAGO
WAGO :
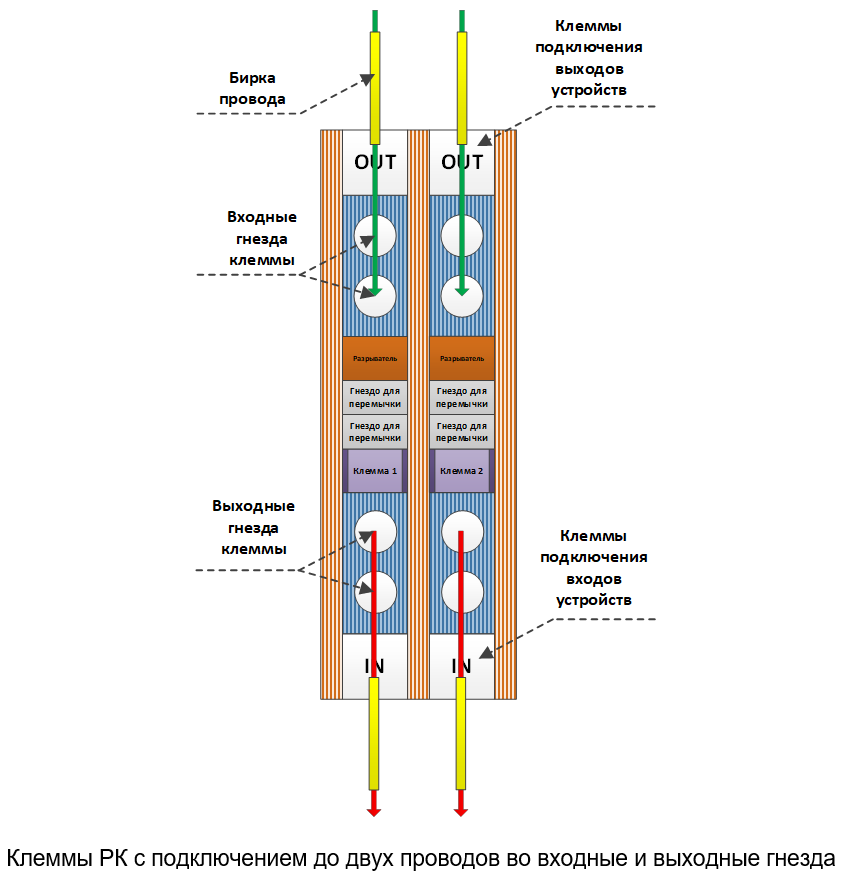
. 13.: WAGO
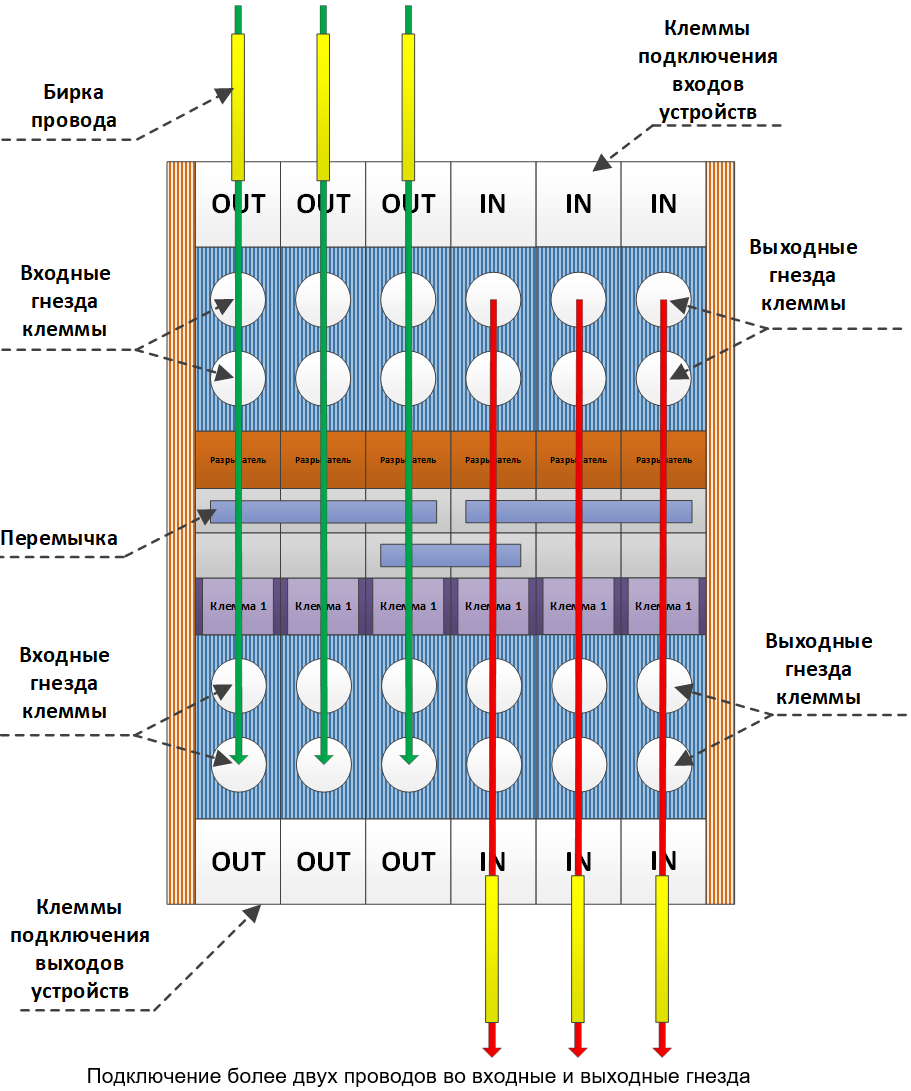
. 13.: WAGO
- . – WAGO, . – - ( ADS2). , , .
:

. 14:
- dBricks. :
— , , ..;
— , dBricks , 100% (« »);
— .
1-2 - ( ).
コックピットレイアウトの作成方法
コックピットのレイアウトは、原則として次のようにする必要があります。
- 通常はコックピットにある、テストオブジェクトの機器を設置する場所を提供します。
- テストオブジェクト、この機器の配線、メカニズムなどへの便利な(可能であれば)アクセスを提供します。
- コックピットのレイアウトを繰り返します。
- コックピットから周辺の景色を繰り返します。
コックピットのレイアウトは、特に航空機の最初の飛行の前に頻繁に変更される可能性があるため、コックピットのモックアップから航空電子工学の開発を開始し、最終決定に移ります。
初期コックピットレイアウト初期コックピット
レイアウトは、初期コックピットビューから作成できます。同時に、標準レイアウトへの小さな変更は、元のコックピットレイアウトに適用されない場合があります。同時に、初期キャブレイアウトの設計は、デバイスの背面パネルへの技術的アクセスを提供する必要があります。以下は、コックピットの同様の初期レイアウトの例です。すべてのサイドパネルは簡単に取り外し可能であり、一般に構造はモジュール式であることに注意してください。

図:15:コックピットの初期レイアウト
可能な限り、隆起したプラットフォームを使用しないことをお勧めしますが、コックピットのレイアウトに使用する理由は少なくとも2つあります。
- 一部の視覚化システムでは、キャブフロアの下に空きスペースが必要です。円筒形の視覚化システムを使用するには、通常、コックピットのレイアウトを1.2〜1.5メートルの高さに上げる必要があります。単純なモニターに基づくコリメーター、球形投影、または視覚化システムは、これを必要としません。
- ペダルポストやその他の機械的制御を使用する場合、キャブフロアの下にある程度のスペースが必要です。この場合、キャブレイアウトも床面から約50センチの高さに設置する必要があります。
, . . , , , , . , ..
–
最終的なコックピットのレイアウトは、認定要件を満たすために実際のコックピットの寸法と一致する必要があります。検査の構成と当局のアプローチによっては、実際のコックピットを再現する追加の「最終的な」コックピットモックアップを作成する必要がある場合があります。この作業では、実際の機器の設置場所、パイロットシートなどを備えた、胴体の実際の部品を使用することをお勧めします。たとえば、SSJ-100プログラムの「ElectronicBird」スタンドには、元々組み立てラインのデバッグに使用されていた実際のコックピットのサンプルが使用されました。正式な生産要件を満たしていないため、実際の航空機では使用できませんでしたが、テストベンチのタスクには完全に適していました。
レベル付きのシミュレーターの一部としてコックピットレイアウトを使用する場合は、FTDレベル4と言います。
4 CFR, 60. 1b Table B1A «Minimum FTD Requirements – General FTD Requirements QPS REQUIREMENTS» : «The FTD must have equipment (e.g., instruments, panels, systems, circuit breakers, and controls) simulated sufficiently for the authorized training/checking events to be accomplished. The installed equipment must be located in a spatially correct location and may be in a flight deck or an open flight deck area. Additional equipment required for the authorized training/checking events must be available in the FTD, but may be located in a suitable location as near as practical to the spatially correct position. Actuation of equipment must replicate the appropriate function in the airplane. Fire axes, landing gear pins, and any similar purpose instruments need only be represented in silhouette.» .


図:16:エレクトロニックバードスタンドでのSSJ-100コックピットのレイアウト
使用する外部視覚環境を模倣するためのシステム
フライトシミュレーターやテストベンチ用の市販のビジュアル環境ソリューションは多数あります。ソリューションは、シンプルなディスプレイからハイエンドのコリメータシステムまで多岐にわたります。私たちの経験では、外部の視覚環境をシミュレートするためのシステムの使用は、次の2つの状況でのみ必要になる場合があります。
- スタンドをシミュレーターとして使用すると(たとえば、FTDレベル4)、
- いくつかの認証テスト。
CFR 60 Table B1A section 6.a : «The FTD may have a visual system, if desired, although it is not required. If a visual system is installed, it must meet the following criteria...». , FTD Level 4. , , 6.a.1-6.a.7 CFR 60.
ほとんどの認証テストは、可能な限り最悪の可視性条件下で実行されます。これは、通常、機器の飛行規則の適用と可視性のゼロを意味します。外部視覚環境シミュレーションシステムの品質が本当に重要な唯一のタイプの認証テストは、離陸/アプローチの最小値の評価です。スタンドでこれらのテストを実行すると、20〜40回のテストフライトを節約できます。私たちの経験では、当局は検証の手段としてベンチテスト結果を使用するためにハイエンドのシミュレーションシステムを必要としませんでした。いずれにせよ、これらの試験をスタンドで実施する予定がある場合は、認証機関に相談する必要があります。
実生活では、エンジニアは機器の動作に焦点を合わせているため、視覚化システムを使用することはほとんどありません。テストパイロットは通常、外部の視覚環境をシミュレートする最も単純なシステムに満足しています。外部環境の視覚化システムは、会社のマーケティング活動やマスコミでのさまざまな出版物の作成に役立ちます。
したがって、円筒形または球形の投影システムを使用してソリューションを選択することは論理的であるように思われます。
- 120x60度の視野を持つフィールド。
- システムの初期コストとその運用コストは中程度です。
ベンチにテストオブジェクトを配置する方法
通常はコックピットの外にある機器に対応するために、市販の通信ラック(サーバーラック)を使用することを提案します。唯一の問題は、強制冷却が必要な機器を見つける必要があることによって引き起こされる可能性があります。この問題は、いくつかの方法で解決できます。
- 吸音材とエアダクトを備えた高圧ファンである特殊な冷却システムの開発。
- 冷却装置の下の特別なフレームに簡単な低圧ファンを取り付ける。ただし、低圧ファンは必ずしも必要な性能を提供するとは限りません。
- 冷却装置の下の特別なフレームに高圧ファンを取り付ける。このソリューションは高性能ですが、多くのノイズを生成します。
- Rittal SKなどの通信ラックに、空調が統合された特別なドアを設置する。
配電システムの作り方
配電システムは、電源をOIに配電するように設計されています。航空機に搭載されているSESシステムをコピーします。
市場には多くの既製のソリューションが存在するため、115VACを28VDCおよび115VAC400Hzに変換するのは簡単です。したがって、これはこの説明の対象ではありません。
次のアプローチを採用しています。
- 最初は、配布システムの特別なレイアウトが使用されます。
- 認定テストを開始する前に、モックアップは実際の配布システムに置き換えられます。
SPPの初期レイアウトは、WAGOクランプ、リレー、ヒューズなどの市販の要素を使用して行われます。これらのデバイスはすべて、DINレールまたは同様の簡単にアクセスできる表面に取り付けられています。すべての接続の図は、航空機の「実際の」SESを繰り返す必要があります。ソリッドステートスイッチギアは最初から使用できます。実際の航空機のSESは、原則として、特に設計の初期段階で、複数の変更や更新が行われる可能性があります。これらの変更はすべて、「実際の」コンパクトな航空機スイッチギアよりも簡単に変更可能なレイアウトを使用してはるかに簡単に実装できます。
配布システムのレイアウトは、認証テストの前に実際のサンプルに置き換えることができます。
航空機搭載機器用のラピッドプロトタイピングスタンド(MILテスト)
プログラムの要件に従って、スタンドは次のタスクの1つ、複数、またはすべてを解決できます。
- 飛行管理法の評価;
- ダッシュボード(インジケーター、コントロール)の予備評価またはレイアウト。
- 機器の情報交換フローのデバッグ。
- ハードウェアの製造とソフトウェアの開発を担当する部門に転送する前のハードウェア要件の評価。
- システムの耐障害性の早期評価とチェックを実行します。
使用する模倣複合体
半自然シミュレーションスタンドと同じ理由で、ADS2システムに基づくソリューションをラピッドプロトタイピングスタンドのシミュレーションコンプレックスとして使用することを提案します。
スタンドの典型的な模倣複合体:
| № | |||
| 1 | 1 | ADS2.
:
|
|
| 2 | 1 | ADS2. Windows.
:
|
|
| 3 | 2-3 | ADS2. Windows. , | |
| 4 | 1 | Windows . . ADS2 UDP |
数学モデルを開発する方法
プロジェクトが進むにつれて、テストベッドは進化します。したがって、開発モデルの「完全な」または「最良の」セットを提供することはできません。ラピッドプロトタイピングスタンドがプロジェクトの全期間を通じて有用であり、それでも妥当な投資が必要であるためには、柔軟性があり、パレートスタイルのアプローチを使用するようにする必要があります。ただし、平均的なケースを説明するために、「初期」および「拡張」モデルのセットの例を提供しようとします。
この例のモデルの初期セットは、次の作業をサポートするように設計されています。
- 制御システムをテストするための法律の開発と検証。
- PFDインジケーターの初期レイアウトのデモンストレーションと検証。
最初のテスト段階では、冗長性、再構成、遅延などを含む複雑な飛行制御電子機器モデルを実装する必要はありません。FMSのような複雑なアプリケーションをテストする必要はありません 。したがって、次のモデルの予備リストを使用できます。
モデルの予備リスト
| № | ||||
| 1 | Simulink | . , , XPlane, . Simulink . | ||
| 2 | Simulink | , , . | ||
| 3 | Simulink | . | ||
| 4 | Simulink | , , (, ). | ||
| 5 | Simulink | ( ), | ||
| 6 | Simulink | , . | ||
| 7 | PFD simulation | C++ Python | , , , , TAWS TCAS |
「高度な」モデルのセットは、次の作業をサポートする必要があります。
- 冗長性、遅延、障害処理などを含む飛行制御法の高度なチェック。
- 自動操縦制御の法則と論理をチェックする機能。
- PFD、ND、FMS、CASメッセージ、シノプティックページ、およびコントロールを含むコックピット情報環境の完全なシミュレーションと評価。
- ソースからエンドユーザーまでの各パラメーターのパスの分析を含む、機器の情報交換フローのデバッグ。
- 失敗の結果の分析;
- DO-178に従って、労働集約的なソフトウェア開発フェーズに移行する前に、ソフトウェア要件を検証します。
その結果、最終モデルのリストははるかに長くなります。以下のリストは完全でも正確でもありません。しかし、私たちはそれが何がなされるべきかを示すことができると信じています。
高度なモデルリスト
| № | ||||
| 1 | Simulink | |||
| 2 | Simulink | , , , , FAA. | ||
| 3 | Simulink | . | ||
| 4 | Simulink | , , . | ||
| 5 | Simulink | , , . . | ||
| 6 | Simulink | , : . | ||
| 7 | Simulink | : ADC, IRU, GPS, VOR, DME, RA, ILS . . | ||
| 8 | Simulink | , : , , , , , , , , .. | ||
| 9 | Simulink | , , , . | ||
| 10 | C++ Python | PFD, ND, FMS, TAWS, CAS, , CAS .. , , , .. | ||
| 11 | C++ Python | |||
| 12 | C++ Python | - , , / , .. | ||
| 13 | Simulink, C++ Python | :FWS, DCA, SWS, CMS . |
モデルの初期セットと拡張セットの間をスムーズに移行するには、モデリングシステムの次の基準を満たす必要があります。
- モデリングシステムのスケーラブルなアーキテクチャ。
- ツールを使用してデータストリームの構成を管理する。
- インターフェイスモデル構成の自動生成。主に、SimulinkモデルのI / O部分と、C ++またはPythonで開発されたモデルのI / Oコードの部分を含める必要があります。
- 構成管理システム。
同じアーキテクチャがラピッドプロトタイピングスタンドとセミナチュラルモデリングスタンドに使用されている場合、上記のモデルの多くは一度開発され、どのスタンドの一部としても簡単に再利用できることに注意してください。
コックピットレイアウトの作成方法
通常、MILブースのレイアウトには次のアプローチを使用しました。
- インジケーター、コントロールパネルなどを含むすべてのアビオニクス。市販のタッチスクリーンモニターをモデルにしています。タッチコントロール機能は、主にリモートと対話するために必要です。
- 主要なコントロール、つまりサイドスティック(またはハンドホイール)、ペダル、およびトラクションスティックは、同様のゲームデバイスを使用してモデル化されています。
- すべてのインジケーターは、標準のVESAタイプのモニターマウントを備えた取り付けスタンドに取り付けられています。
- 一次制御は、特殊な金属表面に固定されています。

図:17コックピットレイアウトコンセプト
結果
この決定またはその決定がなされた理由を理解すると、スタンドのデザインは非常にシンプルです。この資料は、長年の作業と、成功および失敗した技術ソリューションを適用した経験に基づいて作成されました。
現在、小型航空機用の半自然シミュレーションスタンドの製作に積極的に取り組んでいます。このプロジェクトでは、シミュレーションコンプレックスのベースと同じ名前の会社によって製造されたRHYTHMの新しい国内開発を使用することが提案されました。RHYTHMを使用した経験はありませんが、すべてが初めて行われます。
この決定について現在わかっていることは次のとおりです。
- RHYTHMのコストは、TechSATのADS2よりも低いことが保証されています。
- システムをスケーリングする場合の既成のソリューションはありませんが、必要に応じて迅速に行う方法についてはすでにアイデアがあります。
- 避けられない小児期の病気は、開発者の迅速な技術サポートによって補償されます。
私たちの仕事の結果に基づいて、実際のプロジェクトでRHYTHMを使用した経験を確実に共有します。