
最も単純な加速度計、それはどのように機能しますか?
加速度計は、見かけの加速度(物体の真の加速度と重力による加速度の差)の投影を測定するデバイスです。それがどのように機能するかは、簡単なモデルを使用して説明できます。
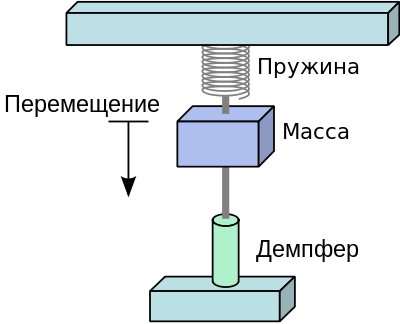
機械式加速度計装置モデル(オリジナル)
加速度が増加すると、質量がばねを伸ばします。学校の物理学カリキュラムのHookeの法則によれば、システムの加速を簡単に見つけることができます。
、ここで、kはばねの弾性係数です。 はその延長であり、mは負荷の質量です。
垂直に配置された3つのセンサーを使用して、3つの軸に沿った物体の加速度を調べ、初期条件を知ることで、空間内の物体の位置を決定できます。
この単純なモデルは、ほとんどの加速度計の操作の基礎であり、3つの主要なサブグループに分けることができます。
- 機械的
- 電子
- 圧電
熱的および光学的なものもありますが、それらについては考慮しません。機械的なものですべてが明確である場合(実際、それらの作業は上からのモデルに反映されています)、電子的および圧電的なものでは、もう少し興味深いものになります。
圧電加速度計
このタイプのセンサーは、1954年にスミスがゲルマニウムやシリコンなどの半導体で発見したピエゾ効果に基づいています。この発見は、センサーとジェネレーターの開発に強い推進力を与えました。その効果は、変形時に圧電素子によって応力が発生することです。

圧電効果のアニメーション(オリジナル)
加速が増加すると、不活性質量は圧電要素への圧力を増減します。圧電効果のおかげで、外部加速度に依存する信号が生成されます。

圧電加速度計デバイス(オリジナル)
このタイプのセンサーには、信号振幅を増加させ、外部デバイスと連携するための低インピーダンス出力を作成する追加のアンプが必要です。プリロードボルトは、ゼロ加速値を較正するために使用され、その質量は、システムのゼロ加速点に対応するように計算されます。
このタイプのセンサーはまだ非常に普及しており、主に高い信頼性を必要とするシステム(自動車)で使用されます。商用電子機器の場合、より小型で安価な電子加速度計がよく使用されます。
電子加速度計
電子センサーの動作原理は、加速度の変化に伴うコンデンサーの容量の変化に基づいています。最も単純な作業モデルが写真に示されています。
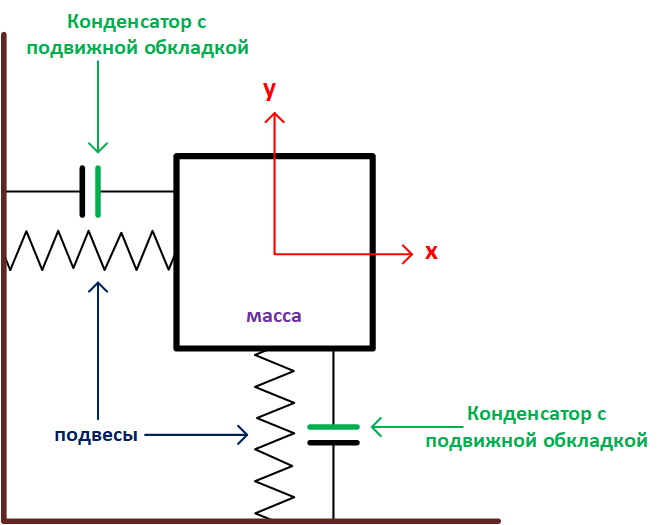
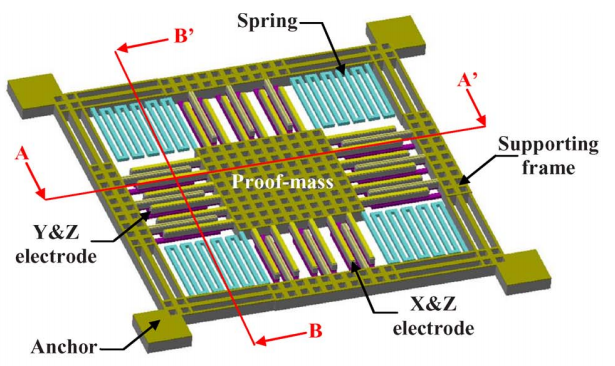
2軸電気機械式加速度計の装置
加速度が変化すると、質量がコンデンサープレート間の距離を変化させます。コンデンサーの容量の最も単純な式から したがって、プレート間の距離がd変化すると、コンデンサの容量も変化します。この方法は、MEMS(MEMS)(マイクロ電気機械システム)の開発により広く使用されています。
MEMSテクノロジーにより、シリコン基板上に可動プレートを備えたコンデンサを作成できます。これにより、デバイスのサイズが大幅に削減され、重要ではありませんが、コストが削減されます。

2軸電気機械式加速度計のデバイス(「IntroductoryMEMS」の本からのオリジナル。この本からさらに図を示します)
読者はおそらく「コンデンサの容量の変化をどのように正確に検出するのか」という疑問を持っています。私はこの質問に徹底的に答えようとします。
MEMS加速度計デバイス。容量の変化を信号に変える方法は?
容量性ハーフブリッジ
したがって、センサー自体の動作を説明する前に、回路でかなり人気のある回路である容量性ハーフブリッジに目を向けましょう。

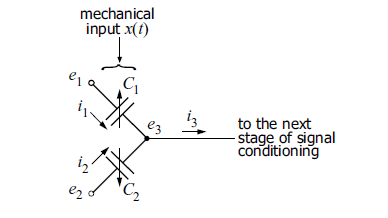
容量性ハーフブリッジ-MEMS
電圧 センサーの基礎 そして 入力され、 -後続の変換のための出力信号。両方のコンデンサの容量は外部加速度に依存し、値x(t)だけ変化します。x = 0の場合、コンテナの料金は同じであると同時に ..。x << dとすると、コンデンサの容量の変化がプレートの位置の変化にどのように依存するかがわかります。
容量を変更するための式の導出
プレートがxだけシフトしたときの各容量の変化を書き留めましょう。
容量の式を使用して次のように記述します。
, :
, x <<d, xd d^2 , :
容量の式を使用して次のように記述します。
, :
, x <<d, xd d^2 , :
パスの一部がカバーされたので、容量の変化の値がプレートの位置の変化(つまり、外部加速度)にどのように依存するかがわかりました。この変化を検出する時が来ました:追加の電流を導入します- ..。ここで、出力電流がプレートの位置の変化にどのように依存するかを計算する必要があります。
容量性ハーフブリッジ-電流
容量の変化に対する出力電流の依存性の式の導出
:
, dq/dt, q=CU, :
, (1.1):
, dq/dt, q=CU, :
, (1.1):
したがって、入力電圧と同じ電位を使用する場合 電流の依存関係を取得します。
結果はかなり奇妙です。出力電流は、容量の変化にまったく依存しません。容量の変化を検出するには、プレートに異なる極性の電圧を設定する必要があります。 、 ..。次に、この変更を考慮して方程式をやり直します。
入力電圧の異なる極性を考慮した、プレートの位置の変化に対する電流の依存性
1.3:
:
:
1.2 , :
:
:
1.2 , :
この式から、次の事実がわかります。
- プレートの位置が時間とともに変化しない場合は、
- 同様に、信号源が 定数(DC)、次に
容量性ハーフブリッジを効果的に動作させるには、可変入力信号e1とe2を使用する必要があり、その間の位相シフトは180度になります(電位の符号が異なるため)。したがって、次の形式の信号を取得します。
どこ -交流信号の周波数(システム帯域幅と機械コンテナの通常の動作に応じて、設計段階で決定されます)。
したがって、式(1.4)が得られます。これは、コンデンサの容量の変化がシステムの出力にどのように影響するかを示しています。ただし、このような信号の振幅は非常に小さくなります。また、負荷を接続して外界と通信すると、システム全体が崩壊します。ここにはアンプが必要です...
アンプを追加するだけ
システムにアンプを追加しましょう(ゲインは -仮想地球の原理は機能します)。
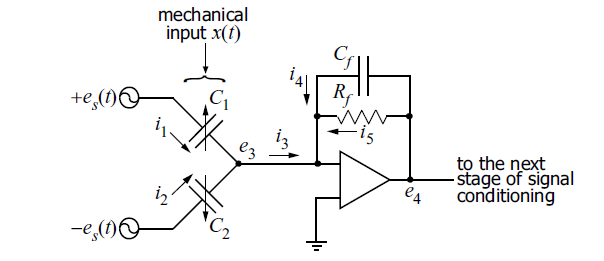
容量性ハーフブリッジ+積分器
ここで、増幅器の出力電圧の容量変化への依存性を見つけます。
アンプ出力電圧
:
dq/dt, (1.4) :
, x, ( ). , , , ( 1 ). :
, :
, :
dq/dt, (1.4) :
, x, ( ). , , , ( 1 ). :
, :
, :
その結果、コンデンサープレートの位置変化に対するアンプ出力信号の依存性が得られました。注意深い読者は、これが振幅変調であることにすぐに気付くはずです!実際、このシステムでは、信号x(t)があり、これに信号が乗算されます。 量だけ増幅します ..。次のステップは、キャリア周波数を削除することです 、そして増幅された信号x(t)を取得します。これは加速度に比例します。長い計算方法により、MEMS加速度計のアーキテクチャを理解することができました。
MEMS加速度計アーキテクチャ
まず、センサーの機能図について考えてみましょう。
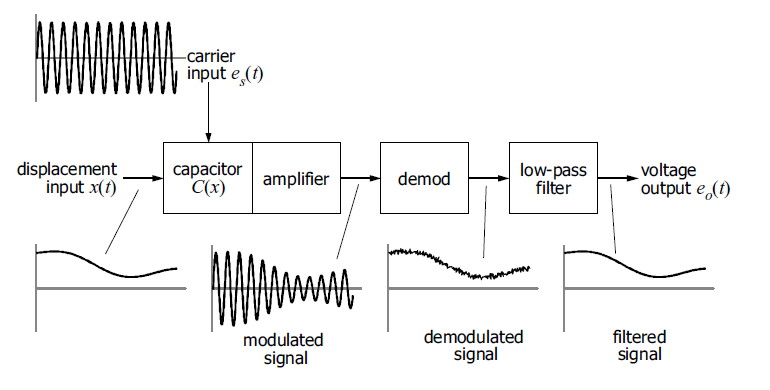
MEMS加速度計の機能図
最初に、加速度の変化を反映する信号x(t)があります。次に、キャリア信号を掛けます 動作可能なアンプで増幅されます(インテグレータモード)。次に、復調が発生します-最も単純な回路-ダイオードとRCフィルター(実際には、複雑な回路が使用され、変調と復調のプロセスを1つのキャリア周波数と同期させます )。次に、残留ノイズはローパスフィルターを使用してフィルター処理されます。
例として、AnalogDevicesの最初のMEMS加速度計の1つであるADXL50を引用します。
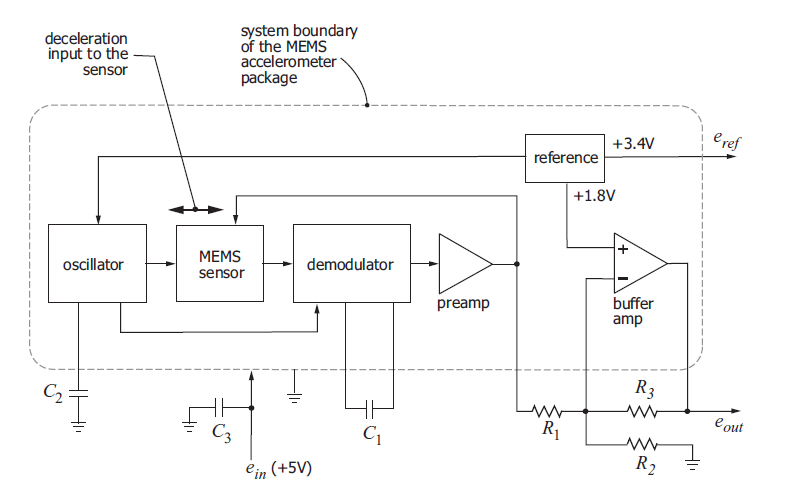
ADXL50のブロック図
おそらく、記事の冒頭にセンサーのブロック図を示しているので、多くの読者はいくつかのブロックの目的を理解していません。これでベールは半開きになり、それぞれについて話し合うことができます。
- 「MEMSセンサー」と呼ばれるブロックは、容量性ハーフブリッジです。
- 「オシレータ」ブロックは、1GHzの周波数で信号を生成します。
- 発振器信号は、同期復調にも使用されます。
- , ( VDD/2- , — «»).
- .
- , .
?
センサーで動作するトランスデューサーの選択は、必要な精度によって異なります。センサーを操作するには、SARまたはビット深度の高いDelta-Sigmaアーキテクチャを備えたADCが適しています。ただし、最新のセンサーにはトランスデューサーが組み込まれています。この方向のリーダーは、STMicroelectronics、Analog Devices、NXPです。例として、3軸加速度計と内蔵ADCを備えた新しいマイクロ回路(ADXL362)を提供できます。

ADXL362のブロック図
ADCを操作するために、アンチエイリアシングフィルターが回路に追加され、追加の高調波がスペクトルに入るのを排除します。
そのような技術はどこで入手できますか?
現在、MEMSテクノロジーを提供するファブレス企業が利用できる多くの工場があります。ただし、最新のマイクロ回路を作成するには、可動プレートを備えた容量を標準の設計ルートに統合する必要があります。これは、そのような容量に加えて、単一のチップ上に追加のブロック(ジェネレータ、復調器、オペアンプなど)を設計する必要があるためです。一例として、TSMCおよび XFabの工場 は、ハーネス全体とともにMEMSセンサーを実装するテクノロジーを提供しています。写真は、3軸加速度計を作成できるコンテナを示しています。
TSMCの 3軸容量性ハーフブリッジ
ロシアにはMEMSセンサーを製造する工場もあります -Sovtestですが、企業には最終デバイスの作成に必要な追加の回路ブロックを統合する技術がなく、唯一の方法はマイクロアセンブリ技術を使用することです。
Sovtestによって開発されたMEMS加速度計
当社はこの方向でどのような進展を遂げていますか?
センサーと連動するように設計されたトランスデューサーがいくつかあります。新製品は次のとおりです。
- 5101NV035-電流センサーで動作するように設計された8デルタシグマADCに基づく16チャネルコンバーター
- 1316NX035は、3軸加速度計およびジャイロスコープで動作するように設計された4チャネル積分電圧-周波数コンバーター(VFR)です。
前回の記事で書いたように 、工場からのプレートの待機期間はかなり長い時間がかかる場合があります。400 MHz ADCの最初のテスト実行後、プレートの到着時間とその後の測定には6か月以上かかりました。この間、私たちのチームはなんとかPNC 1316NX035(以前の回路1316PP1Uの開発 )を作成しました。これについて少しお話しします。
電圧-周波数変換器
センサーからのデータを変換するには、通常SARまたはデルタシグマADCが使用されますが、別のタイプのコンバーターがあります。VFCを統合することで、大きな利点があります。
- それらはより少ない床面積を占め、同じ直線性とノイズでより少ない消費をします。
- シンプルなアーキテクチャ。
- 入力ノイズおよび干渉信号に対する高い耐性。
- ノイズに対する耐性と出力信号の干渉。
- 処理せずに無線周波数通信チャネルにデータを転送する機能。
1316HX035マイクロ回路は、4チャネルの電圧-周波数コンバーターとデジタルコードです。3軸加速度計の出力は、3つの主要な高精度チャネルに接続されています。 4番目のチャネルには入力4チャネルマルチプレクサがあり、温度、湿度などの追加のシステムセンサーを接続できます。顕微鏡では、回路は次のようになります。
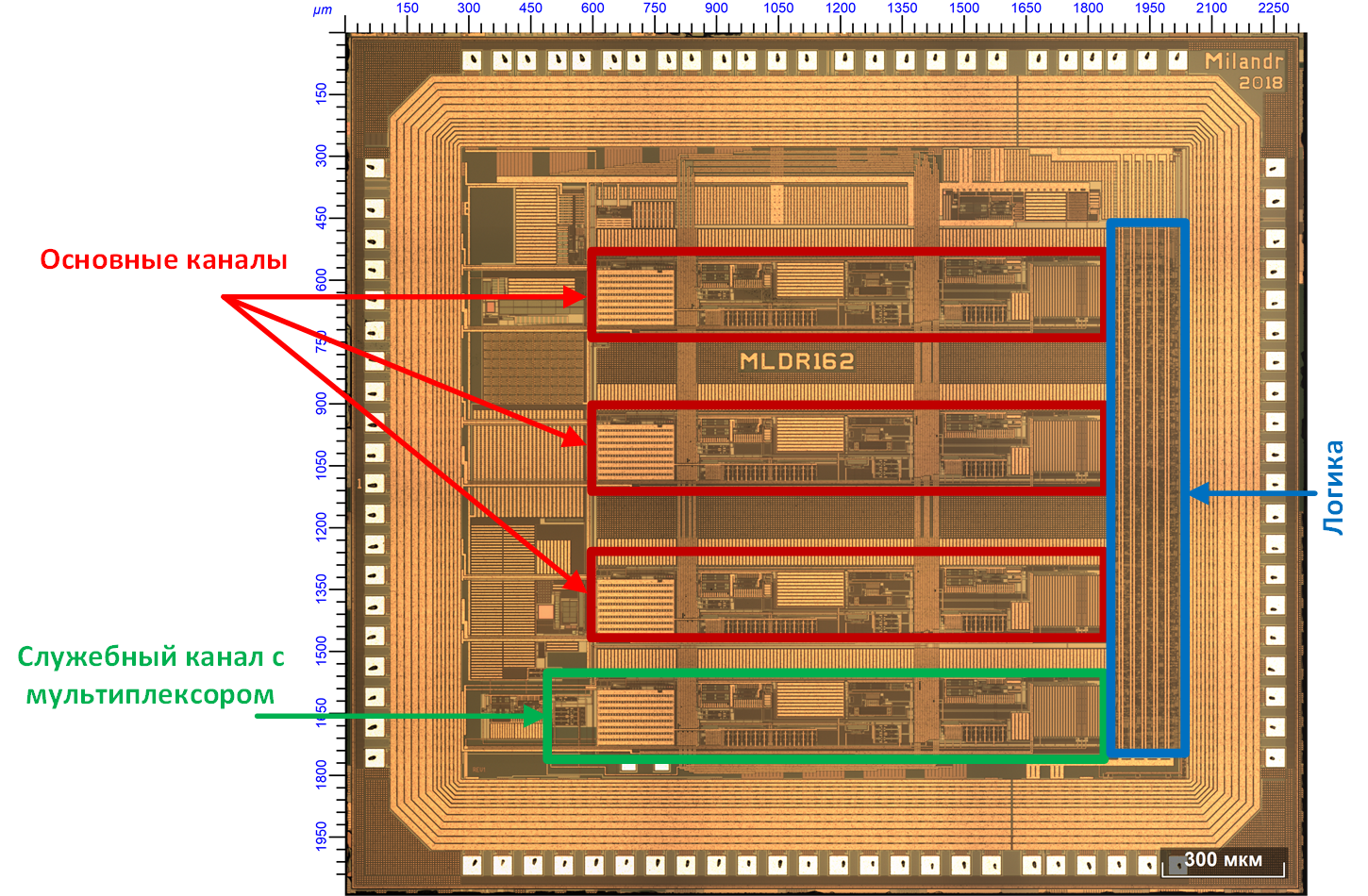
顕微鏡下でのVFC3
つのメインチャネルはそれぞれ、±4Vの範囲の入力電圧を、正および負の入力電圧に対応する3つの出力で最大1250kHzの周波数に変換します。また、マイクロ回路には、周波数パルスをカウントするために、各チャネルに16ビットのリバースカウンターがあります。SPIインターフェースは、変換モードを制御し、チャネルパルスカウンターの内容をサンプリングするために使用されます。PNCパラメータの主な要件は次のとおりです。
- ゼロ入力信号(接地入力)での出力周波数の高い熱的および時間的安定性
- 変換の動的範囲-22ビット以上
- 入力信号の変換の連続性と単一周波数パルスの損失の許容範囲外。
要件1および2を満たすために、アナログ 自動キャリブレーションが使用されます。これは、回路がオンになると自動的に実行され、SPIインターフェイスを介したコマンドによっていつでも開始できます。要件3は、回路ソリューションによって提供および保証されています。かなりまともな精度パラメータを達成することが可能でした。典型的な変換非線形性は30ppmであり、ゼロオフセットは200 kHz / Vの変換係数で0.1Hz未満でした。動的変換範囲:fmax / fmin = 2 * 1.25MHz/0.3Hz∿8.33M、これは23ビット以上に対応します。
「しかし」は1つだけです-双極栄養。良好なゼロ安定性(0gの加速に対応する電圧)を確保するには、バイポーラ電源を使用する必要があります。このソリューションは非常に効果的です。結局のところ、0gが「グラウンド」に対応する場合、システムは事前に安定します。また、システム設計も改善されます。最新のセンサーでは、Vdd / 2電源の半分がゼロとして使用されますが、コンバーターの電圧値がセンサーの電圧と異なる場合、追加のキャリブレーションが必要なオフセットが自動的に取得されます。
おそらく、多くの消費者にとって、バイポーラ電圧は少し怖いです、そして私たちは開発者としてこれを理解しています。おそらく、将来的には、MEMSの商用バージョンを作成する(またはセンサーをPNCに統合する)予定です。もちろん、これまでのところ、これらは単なる計画ですが、彼らは日の目を見ると確信しています。
PSはサンプル調査プロセスからボーナス写真を見つけました。一般的に、これは私にとって、開発プロセスの最も興味深い部分です。あなたの頭脳は工場からの暑さの中であなたに手渡され、あなたはそれに電力を供給し、あなたが待つあなたの指を交差させます-「それはうまくいくかどうか?」

PPSセンサーのトピックが好きな人は誰でも、将来、ハードウェア設計センターの同僚が、MEMSセンサーに基づいて作成されている慣性システムについて話したいと思い ます-SINS。