1年ちょっと前、私は幸運にもCuriosityローバーの操作を担当する科学者とエンジニアのチームの一員になりました。それ以来、私はローバーについて多くのことを学びました。しかし、まだまだ見られないことがあります。スピリット、オポチュニティ、好奇心、忍耐力は、これまで人間が作成した中で最も洗練されていながら信頼性の高いロボットの一部です。同時に、ローバーを制御するために使用されるツールと方法は、習得が非常に簡単で理解しやすいものです。そして、これは良いことです。なぜなら、2月18日にパーサーバンスが火星の表面に降りてきて、その後、惑星を研究するために送られるからです。今の私の仕事は、ローバーを制御する方法についてあなたに話すことです。新しいローバーが火星に到着したとき、あなたはすでに何が起こっているのか、そしてそれがすべてどのように機能するのかを理解しているでしょう。
この記事の多くは、好奇心に関する私の経験の要約です。スピリットとオポチュニティは、この点で多くの点で「相続人」に似ていることに注意してください。Perservanceの管理には同じテクノロジーと方法が使用されるため、大きな違いはありません。
基礎
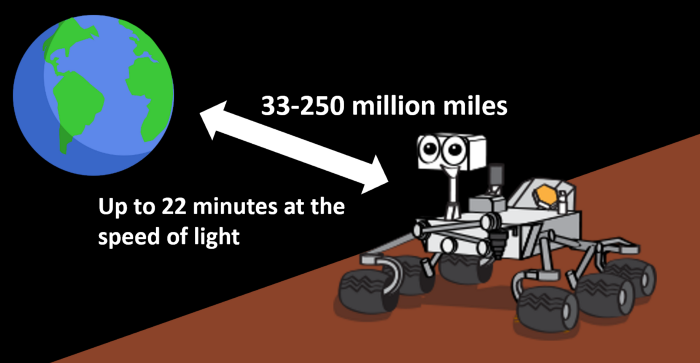
知っておくべき主なことは、火星は私たちから非常に遠く離れているということです。地球から送られた無線信号は22分で火星の表面に到達します。したがって、リアルタイム制御はオプションではありません。さらに、好奇心は1日に1回地球から情報を受け取ります。残りの時間は彼は一人でいます。同時に、自律性については話していません。ローバーには、独立して実行できるアクションのセットが限られています。ローバーが行うことのほとんどは計画され、地球上のデバイスのメモリに書き込まれます。
もちろん、いくつかの例外があります。ローバーは、それ自体でいくつかの問題を解決できなければなりません。しかし、これらの決定のほとんどは、何らかの外的要因に応じて停止し、地球からの指示を待っています。イージスにはある程度の自律性があります。これは、好奇心がレーザーで「撃つ」必要のある岩片を独立して選択できるシステムです。
足元に気を付けて
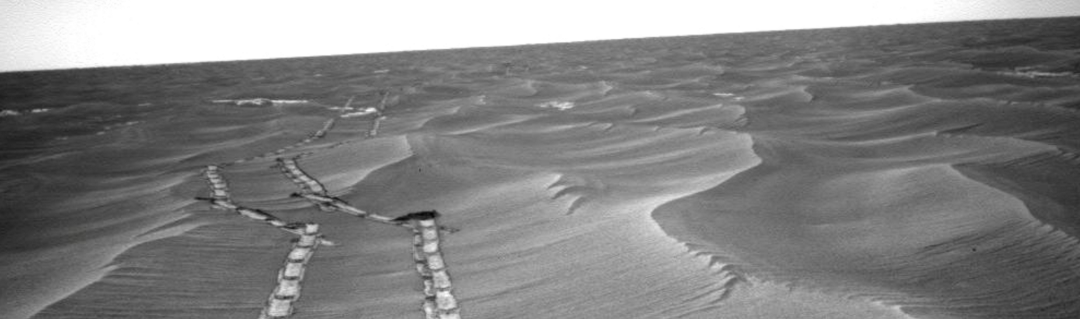
ローバーオペレーターの主な任務は、火星への旅全体を通してその安全を確保することです。したがって、アクションで考えられるすべてのオプションを慎重に評価する必要があります。 NASAのローバーにはいくつかのカメラがあり、そのおかげでローバーは人間の目で見たように「絵」を形成します。近くの問題の存在を評価するhazcam、「危険カメラ」、および前方の道路を評価するナビゲーションカメラであるnavcamもあります。他にもカメラがありますが、これらは主に科学的なタスクに使用されるため、それらがどのように機能するかについては説明しません。

ほとんどの場合、navcamはローバートラックセクションを視覚的に評価するために使用されます。彼らが受け取る画像は、地球上で3次元の「写真」として見ることができます。 NASAは、ローバーの周囲の領域を視覚化し、ローバーとその周囲の領域の仮想モデルを作成するように設計された特殊なソフトウェアを開発しました。この仮想モデルは、オペレーターが計画したアクションをテストするために使用されます。エミュレーションがうまくいけば、コマンドを火星に送ることができます。このようにして、科学者は未確認のチームを送ることによって起こりうる悪影響から身を守ることができます。
これは、モデルの準備が完全に整った後の、シミュレートされたローバーの動きの様子です。灰色の領域は、ローバーが近い将来通過する火星のセクションです。オレンジブラウンのラインは、実際にはローバーの道です。1日あたり約30メートルの表面がモデル化されており、カメラはそれ以上の情報を収集できないため、ローバーはそれだけ移動します。
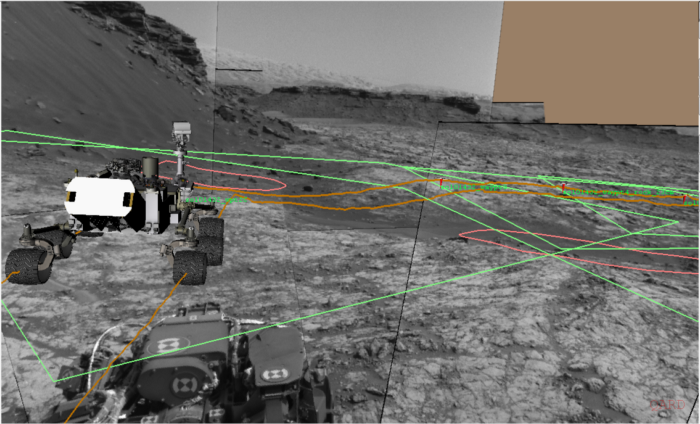
そして、これがナビゲーションカメラによって得られた実際の画像へのシミュレートされたローバーパスの重ね合わせです。
ローバーの動きを計画するとき、考慮すべきいくつかの重要なポイントがあります。たとえば、途中のオブジェクトのサイズ。ローバーが扱える最大サイズは約50cmです。それより大きいものは丸くする必要があります。砂(正確には砂ではありませんが、それと呼びましょう)も曲がるのが望ましいです。砂がたくさんあると、ローバーが動かなくなる可能性があります。小さな岩片でも、鋭いエッジがローバーホイールに損傷を与えるため、危険です。
速い、遅い、それとも遅い?
科学者が移動の方向を決定した後、あなたは移動する方法を正確に理解する必要があります。ブラインドモード、視覚オドメトリ、オートナビの3つのモードがあります。
ブラインドモードは、可能な限り最も簡単な動きです。この場合、ローバーは地球から送信された指示に従い、何にも注意を払いません。理想的には、これはローバーをナビゲートするための優れた方法ですが、火星の状態は理想からほど遠いです。多くの場合、外部要因が目標に向けた進捗に影響を与えます。これは、たとえば、ローバーが10メートル進む代わりに、9または5移動するように、表面のホイールをスライドさせることができます。
ブラインドステアリングとは何かを理解するための優れた方法は、目を閉じて特定の経路をたどることです。たとえば、前方に7メートル進み、次に左に30度回転して、さらに4メートル歩きます。この場合、私たちは周りで何が起こっているのかわからず、変化する条件に適応しません。
一般に、ブラインドステアリングは最適なオプションではありませんが、写真を撮るためにシステムを停止する必要がないため、ローバーをすばやく動かすことができます。最高速度では、ローバーはわずか1時間でサッカー場の長さを移動できます。ただし、このオプションは、潜在的に危険なオブジェクトが周囲にない場合にのみ選択されます。
視覚オドメトリオペレーターによってより頻繁に使用されます。この場合、ローバーはカメラで地面の写真を撮るためにメーターごとに停止します。次に、オンボードコンピュータが画像を評価し、前の画像と比較して、ローバーの位置など、画像の周囲で何が変化したかを理解しようとします。次に、コンピューターは新しいナビゲーションコマンドを送信して、順調に進みます。
この方法は前の方法と似ていますが、目を開けて周りを見回すために停止する必要のある2、3のステップごとに進むプロセスが異なります。
視覚オドメトリは、速度と移動精度のバランスです。この方法は、ローバーの経路にある障害物を検出して回避するのに役立つため、非常に重要です。
自動ナビゲーション、またはautonavは、最も技術的に高度な方法です。車の中でドローンを使うのと比較することができます。私たちは共通の目標を設定し、ローバー自体が目標への安全で高速なパスを探します。ローバーは、カメラを使用して状況を評価するために、すべてのメーターを停止する必要があります。しかし、ローバーはナビゲーションカメラでシングルショットを撮る代わりに、ハズカムも使用します。次に、オンボードコンピュータがこれらすべての情報を組み合わせて、「ハザードマップ」を形成します。問題のある場所は赤で、状況がそれほど悲惨ではない場所は黄色で、ルーターの宣伝に最も適した場所は緑で示されています。

これは、ローバーの最も遅い進行オプションです。理想的な状況で、ローバーが前述のようにブラインド方式を使用してサッカー場の長さを歩くことができる場合(これは約100 mです)、自律モードの場合、理想的な条件では、ローバーは30メートルしか移動しません。
同時に、ローバーは砂や鋭い石を検出する方法を知らないため、この方法はそのエリアが絶対に安全な場合にのみ使用されます。
忍耐力から何を期待できますか?
NASAは、新しいローバーが早くも2月18日に惑星の表面に着陸することを期待しています。その後、彼が火星に移動し始めることを願っています。上で述べたことはすべて新しいローバーに当てはまりますが、より多くの機能があります。たとえば、彼はCuriosityの少なくとも2倍の速度で移動できます。オンボードPCには、より多くのコンピューティングリソースと、改善されたデータ処理アルゴリズムがあります。ロボットのナビゲーションカメラは色付きで、好奇心よりも高い解像度の画像を受け取ります。さらに、ローバーは前モデルよりもホイールが厚く、トレッドパターンが異なります。科学者たちは、車輪の損傷が少なくなると信じています。
ローバーにとって最も重要なタスクの1つは、地球に戻るためのサンプルの収集と保存です。多くはこの任務の成功にかかっています。そして今、ローバーが動き始めるとき、あなたはそれがこの動きを提供するものと方法を理解するでしょう。
注: Evan Hilgemannは、NASAのジェット推進研究所(JPL)の機械エンジニアです。
