サイエンスフィクション、特にミッドセンチュリーのアメリカ人作家の古典では、ロボットは非常に一般的です。ほとんどの場合、彼らは人を助け、時には彼らは一人で生活し、時には彼らを創造した人々と戦うことさえあります。しかし、ほとんどの場合、これらは2本の脚と2本の腕を備えた直立した人型機械です。映画作家やスクリーンライターが機械に人間の特徴を与えようとするのは驚くべきことです。
現代のロボットははるかに実用的であり、あらゆる狭いタスクに最大限に適合し、可能な限り人間とは異なって見えます。
しかし、実用性をすべて考慮したにもかかわらず、人間や動物にできるだけ似たロボットを作成している会社が1つあります。それは、ボストンダイナミクスです。そして最近、彼らはロボットにダンスを教えました!
カットの下でこのビデオを参照してください。
さまざまな手による会社のすべての困難と多数の転売にもかかわらず、BDは心を失うことはありません。彼女は野心的な計画を持っています。科学的研究は、数週間前の大晦日に文字通りインターネットを爆破した燃えるようなビデオによって証明されるように、商業活動と密接に関連しています。現在、視聴回数は2,500万回を超え、人気は高まっています。
これはコンピュータグラフィックスではありません。ビデオは、画面に表示されていることを実際に実行する実際のロボットで作成されています。最初の2分間は、接着や編集を行わずに1つのフレームで撮影されました。周囲も、最大限のリアリズムを強調するために特別に選ばれています。これは、クロマキーや華やかなシーンではありません。これは装飾されていない実験室のテストルームで、ガラスの後ろにいくつかの機械とメカニズム、通常の職場、ビデオグラファーのための床のマーキングを見ることができます。
優雅な動き、ハイジャンプ、シンクロナイズドアクション-これらすべてが現代のロボティクスの能力を完全に示しています。Boston Dynamics(BD)はどのようにしてこの成功を達成しましたか?この記事では、会社の歴史、成功と失敗、そしてこのロボットダンスがどのように撮影されたかについての簡単なツアーを提供します。
子供の頃、エンジニアが自己複製および自己学習ロボットを作成し、アップグレードのためにハイテクリソースを求めて彼らの間で小さな戦争を始めたというサイエンスフィクションの話を読みました。この話で、私は1つの詳細を覚えています。独立を獲得した最初のロボットは、実用的な反重力ドライブを、その作成者のような原始的な脚に置き換えました。エンジニアは断固として反対しましたが、ロボットは彼の議論に耳を傾けませんでした。その後、これはロボットとの残酷な冗談を演じました:彼は戦いの間につまずき、彼の親戚に押しつぶされました、それは彼が反重力を去ったならば起こらなかったでしょう。
車輪の上や線路上にあるほとんどすべての最新のロボットは、シンプルで信頼性があります。バランスに問題はなく、ほとんどの場合、操作はフラットフロアの部屋に限定されます。

アマゾン
BD倉庫のロボットは、サイエンスフィクションの夢を実現することを決定しました。

ロボットアトラス
すべてが始まった経緯
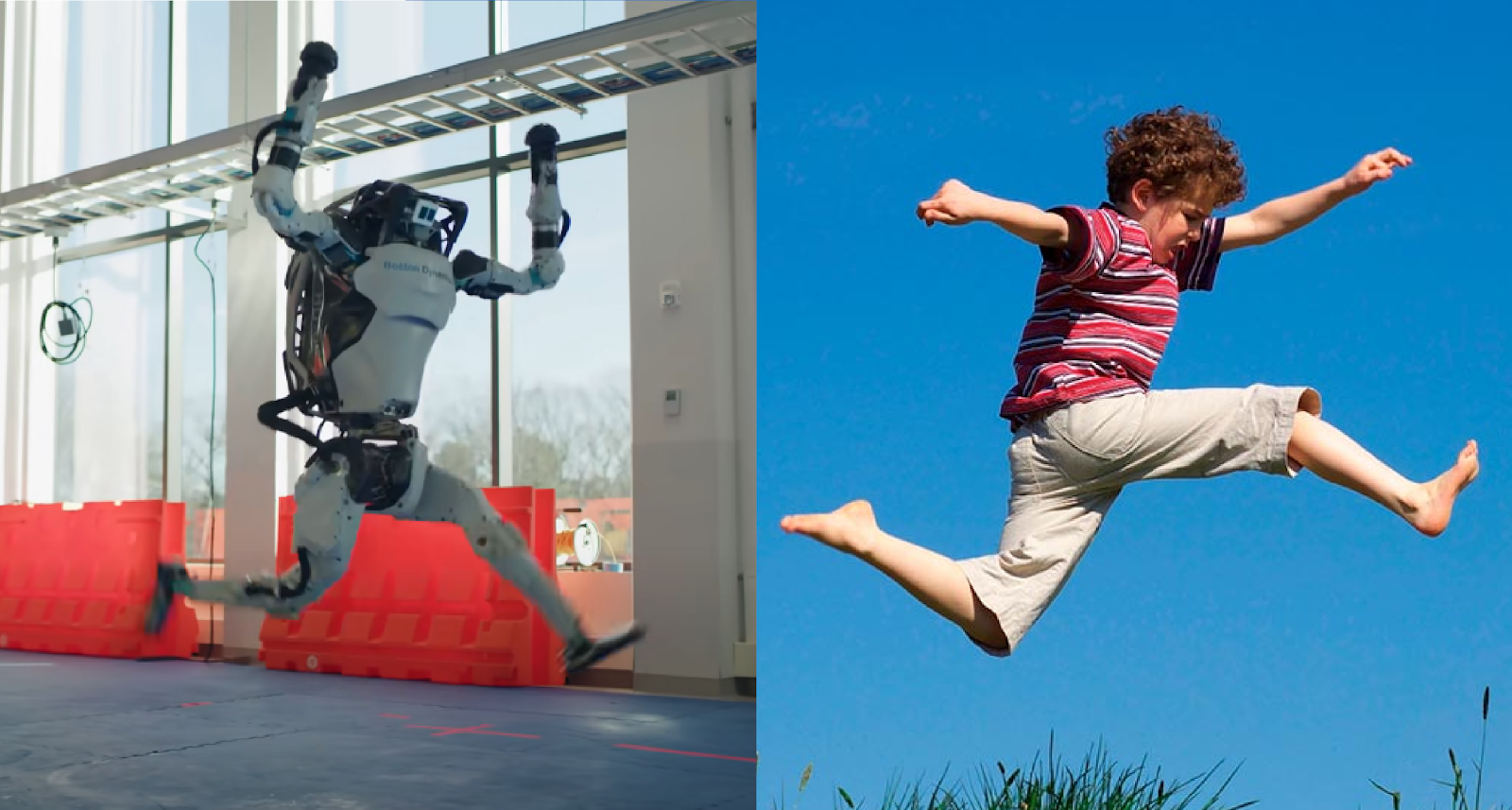
人間と動物の進化は、普遍的な手足がいかにあるかを明確に示しています。彼らの助けを借りて、あなたは歩いたり、走ったり、山の斜面や木の幹を登ったり、階段を上ったりすることができます。霊長類は、この多様性の中で最も遠くまで行きました。
長い間、直立姿勢はエンジニアに与えられませんでした。ジャイロスコープはかさばりすぎ、原始的な電子技術基盤のため、フィードバック付きのコンパクトな前庭装置のアナログを作成できませんでした。しかし、手頃な価格のマイクロシステムの出現により、このエンジニアの夢が実現しました。ウォーキングロボットに関わるすべての集団の中で、ボストンダイナミクスが最もよく知られています。
この研究室のインスピレーションと永続的なリーダーは MarkReibertです。

マークReibertは、
1973年に彼は電気工学の学位を取得し、ボストンノースイースタン大学を卒業し、1979年に有名なアメリカの科学者と発明者から、最初のジャンプマシンを開発するために助成金を受けた アイバン・サザランド。
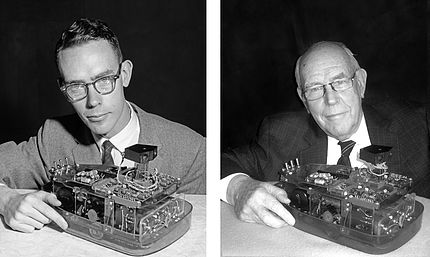
Ivan Sutherland
1980年、彼は開発にDARPA(当時はまだARPA)に興味を持ち 、彼らから最初の資金を受け取り、LegLaboratoryを開設しました。もともとはマークが教授として働いていたカーネギーメロン大学にあり、その後マサチューセッツ工科大学に移りました。
レッグラボラトリー
MTIのウェブサイトには、この研究チームのページがまだあります。これは、現代のデザインやウェブ開発のトレンドよりずっと前に作成されたものです。暖かくてチューブのようなweb1 はかなり感動的に見えます。リンクをたどって、この有名な科学チームの歴史がどこから始まったかを確認することを強くお勧めします。
1983年に、彼らの開発は「3Dワンレッグホッパー」という名前で準備が整いました。

片足のジャンパーは、特定の方向にジャンプすることでバランスをとったり移動したりでき、ドロップしようとするとバランスを維持できます。片足のバランスを計算するのが最も簡単なため、珍しい動きの方法が選択されました。
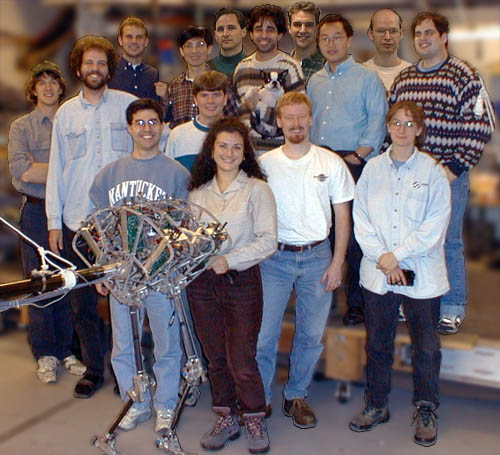
次のビデオでは、レッグラボで作成されたロボットを見ることができます。それらはすべて純粋に研究メカニズムであり、実用的な価値はなく、関節の働きの研究のためだけに作成され、異なる動作原理と運動の数学的アルゴリズムを駆動します。一部はより複雑な設計の一部です。それらのいくつかは、それ自体でバランスを維持することができず、カウンターウェイト付きのバーの助けを借りて動くことができません。「裸の」ロボットは、ターミネーターと実験室の内部についての映画を思い起こさせます-「ミスバスターズ」のハイメとアダムのワークショップ
マークは、1986年に出版された彼の著書Legged Robots That Balanceで、蓄積された研究経験を表現しました 。
研究所から会社へ。軍隊のために働く
時間が止まらない。経済的自立を促進するために、マークは1995年に大学を辞めることにしました。彼はついに1992年に設立された彼自身の会社に向けて出発します。この会社の名前は、現代のロボティクスの成果を示す壮大なビデオのおかげで、現代のテクノロジーに興味がない人たちの間でも聞かれています: ボストンダイナミクス。
キャリアの最初の頃と同じように、マークは軍から資金を受け取っています。 DARPAは、従来の車両が通過できない領域で大きな負荷を運ぶことができる「作業ラバ」を開発する任務を彼の会社に与えます。 TKによると、ロボットは登ることができ、大きな傾斜を乗り越え、茂みを乗り越え、滑りやすく緩い表面を通過できる必要があります。つまり、歩兵やラバができることはすべて実行できる必要があります。
この割り当てを完了するのは簡単ではありませんでした。 2005年にのみBigDogモデルが導入されました 。

プロジェクトは非常に野心的でした。それは開発された最初のそのような計画であり、そのメディアの成功はすべての期待を上回りました。ロボットに関するニュースはすべてのアイアンから聞くことができ、多くのビデオが記録的な視聴回数を記録しました。
これまで、ウォーキングロボットの最も広く知られているモデルは、移動するとき、不器用で不器用なときに純粋に面白い製品でした。彼らはわずかな衝撃から落ち、完全に平らな床の上でしか動くことができませんでした。しかし、BigDogは将来のマシンのように見え、用途が広く実用的でした。人々は、生き物のように歩き、大きな荷物を運ぶことができる自律的なメカニズムの光景に魅了されました。マークの会社の発案は、伝説的なアーサー・クラークの伝説に完全に対応していました。「十分に高度な技術は魔法と見分けがつかない」。それは人々がこの機械的な生き物のパロディーを撮影しているという点にさえ達しました:
残念ながら、ロボットは技術的にはビデオが示唆するほど成功していませんでした。 2008年にリリースされた第2世代でさえ、欠陥が多すぎました。 2013年、米国国防総省はこのプログラムの継続を拒否しました。主な問題の1つは、内部燃焼エンジンの強力でマスキング解除されたノイズであり、エンジニアはそれを取り除くことができませんでした。 2つ目の問題は、TKが正式に履行されたにもかかわらず、ロボットの特性が実際の戦闘任務に完全に参加するにはまだ不十分であったことでした。通過性は印象的でしたが、軍隊はそれを欠いていました。自律性はわずか30kmで、ロボットは歩行者の速度でこの距離を移動しました。ロボットは技術的に非常に複雑であったため、プロトタイプには深刻な信頼性の問題がありました。最初のバージョンは、メカニズムで何かが壊れる前に30分間の継続的な作業にほとんど耐えられず、それ以上機能できなくなりました。最新のロボットモデルは最大3時間自信を持って動作しましたが、これはまだ非常に小さく、このような複雑なデバイスを現場で修理することはほとんど不可能です。このアシスタントに大きな期待が寄せられた場合、故障は実際の戦闘操作を危険にさらすことになります。さらに、ロボットの製造には非常に費用がかかりました。このアシスタントに大きな期待が寄せられた場合、故障は実際の戦闘操作を危険にさらすことになります。さらに、ロボットの製造には非常に費用がかかりました。このアシスタントに大きな期待が寄せられた場合、故障は実際の戦闘操作を危険にさらすことになります。さらに、ロボットの製造には非常に費用がかかりました。
それにもかかわらず、このモデルの開発は断念されましたが、軍はBDとの協力をやめませんでした。研究を続ける中で、さらにいくつかの種類のウォーキング、ランニング、さらにはジャンプやクロールのロボットがリリースされました。

台座にはリトルドッグ(ビッグドッグの弟)、スポット、ビッグドッグ、ワイルドキャット、LS3(ビッグドッグの兄)が立っています。

SANDFLEA-フリー。
圧縮ガスの缶で2メートルを飛び越えることができるベビーロボット(高さ15cm)。
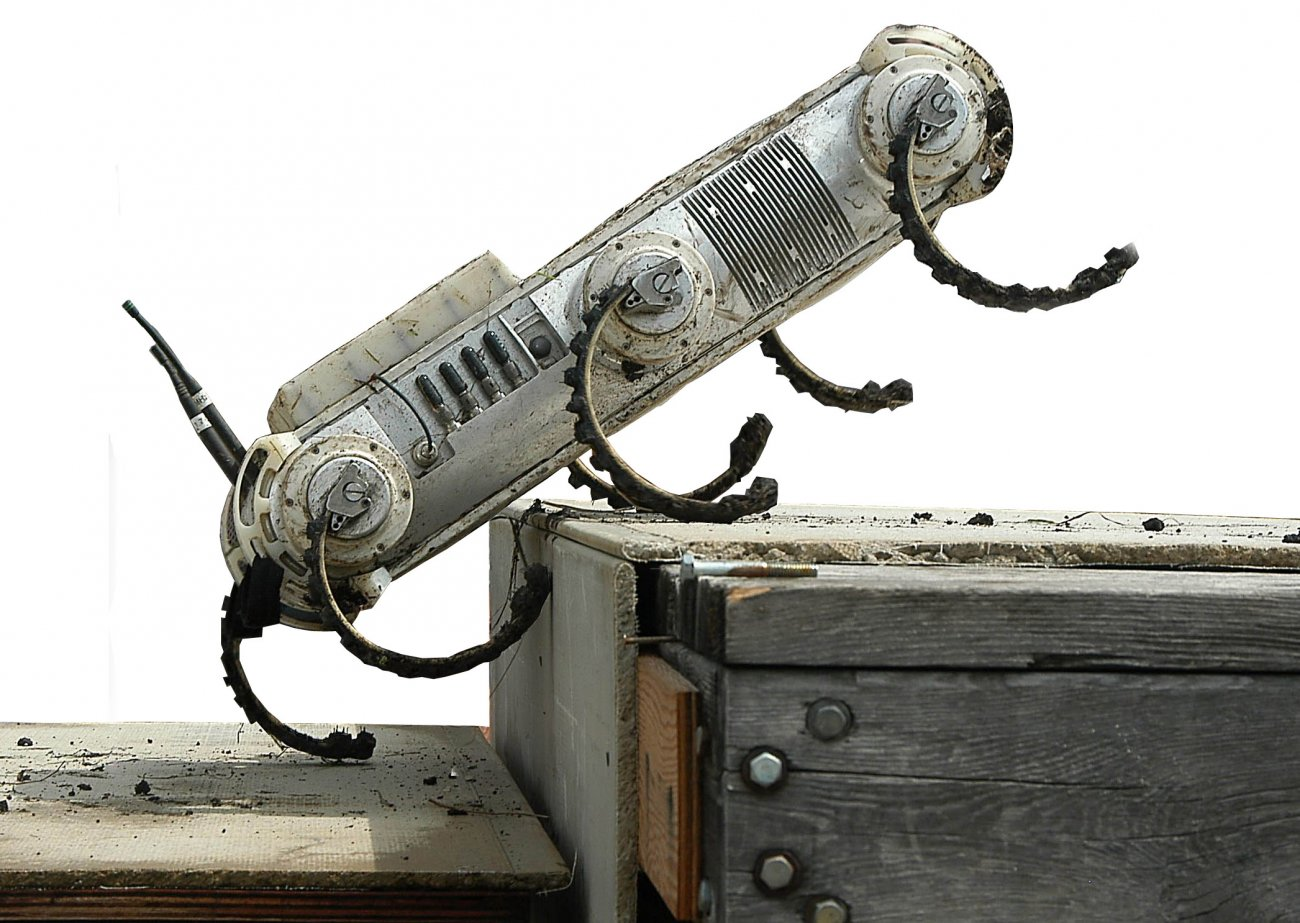
RHEX。
SANDFLEAと同じくらいの大きさで、小さな障害物を乗り越えて、沼沢地でも這うことができます。
財務上の質問
軍隊と協力して、会社は何度か手を変えました。 2013年の終わりに、Googleは会社を買収しました。彼らがなぜそれをしたのかを言うのは難しいです。おそらく、特許ポートフォリオを追求し、利益に依存するために、他のいくつかのロボット会社や新興企業と一緒にさまざまな会社を買収する過程にあるのかもしれません。コラボレーション中、BDとGoogleは共通の言語を見つけることができませんでした。 GoogleがAndyRubinを去った後 取引を開始した、会社の将来は中断されました。アンディ自身は、予備調査でさえ非常に長い時間がかかったため、開発のスピードに失望したと述べました。インターネットの巨人は、商業的成果が10年以上待たなければならない会社にそれほど多くのお金を投資したくありませんでした。さらに、最新のヒューマノイドロボットが押されてノックダウンされるビデオは、Googleの広告部門によって嫌われました。
(1.22では、ロボットはクラブで押され、ボックスを「選択」します。2.04では、ロボットは後ろを押すとノックダウンされます)
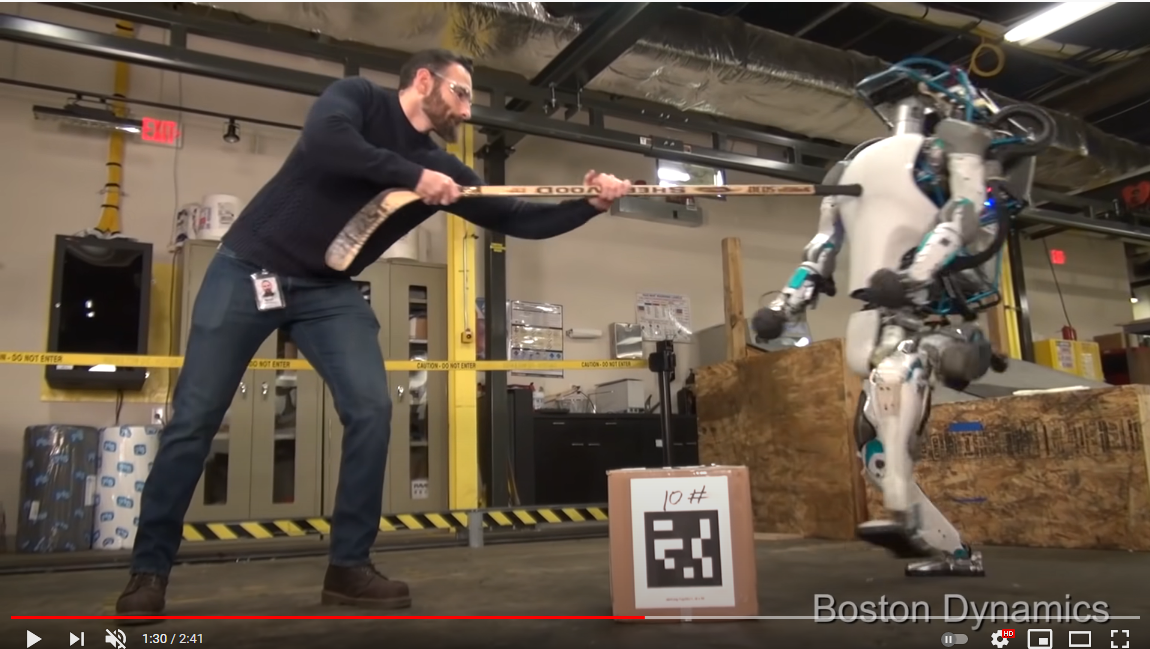
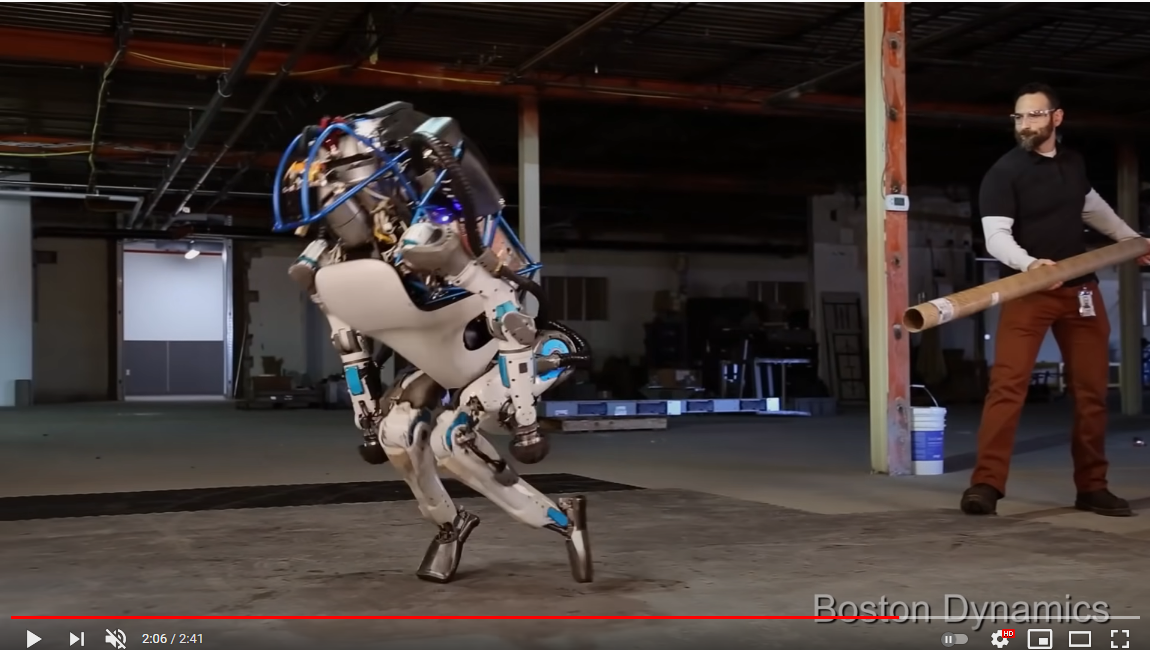
さらに、ロボットの擬人化は、バランスアルゴリズムのデモンストレーションで見た聴衆の間に驚くべき共感を呼び起こしました-嘲笑とロボットに共感しました。 Google Courtney HoneのPR部門の責任者が書い
た手紙がインターネットに掲載され ました。彼女は、ヒューマノイドロボットは、まるで彼らが仕事を引き受けることができるかのように、彼らを脅威と見なしているという事実によって人々を苛立たせていると書いています。最後に、2016年にGoogleはBDを販売することを決定しました。噂によると、アマゾンとトヨタは会社を買収したかった。その結果、それはソフトバンクを保持している日本人に行きました。
BDの金融の冒険はそれだけではありませんでした。最近、同社が再び売りに出されていることが知られるようになりました。昨年12月、SoftbankとHyundaiは、約10億ドルという控えめな金額で合意しました。
それにもかかわらず、これらすべてが新しいロボットの開発を妨げることはありませんでした。クラブで嘲笑されたアトラスに加えて、ハイブリッドモードの動きを備えたロボット、ハンドルが開発されました。ロボットの脚は、平らな面をすばやく移動して階段を降りることができるホイールで終わります。彼は必要に応じてジャンプすることさえできます。
最初の商用モデル
最近では、同社のウェブサイトに店舗のあるセクションがオープンし、 BDは約30年ぶりに商用モデルのスポットを提供しています。犬の名前(スポット-斑点)にもかかわらず、ロボットは産業施設での商用利用のために提供されており、家庭での使用を目的としていません。適度な寸法(ロボットはドイツの羊飼いよりわずかに大きい)は、適度な可能性を示唆しています。アクティブモードではわずか1時間半、バッテリーは2時間充電されます。

デザインはとてもよくできていました。ロボットはもはやターミネーターに似ておらず、非常に優雅に動きます。以前のバージョンの4本足のロボットのように、その手足はトレッドミルしません。基本価格-75,000ドル。市場に出回っているそのようなオファーは片手で数えることができるので、これが多いか少ないかを言うのは難しいです。パンデミックと全般的な不況にもかかわらず、同社はこのモデルのロボットを約400台製造しており、そこで止まることはないと述べています。
ダンス
会社の歴史を思い出し、ロボットのいくつかのモデルを検討した後、炎上ダンスがどのように作成されたかについて少し話すことができます。これを行うために、私はボストンダイナミクスのエンジニアリング担当副社長であるアーロンサンダースとのインタビューの要約版を作成しました。これは 、米国電気電子技術者協会が発行したIEEESpectrumマガジンによって彼から引用されました 。
ビデオで紹介されているロックンロールシングルは、1962年にTheContoursによって録音され ました。 「DoYouLove Me」は、彼らの最も有名な作品の1つです。振付家はMADKINGTHOMASのモニカ・ トーマスでした。
これまで、BDのロボットとエンジニアはこのようなことをしたことがありませんでした。利用可能な動きの範囲には、ウォーキング、ランニング、ジャンプの多くの要素、体操からのいくつかのエクササイズ、さらにはパーカーが含まれます。しかし、メカニズムを踊らせようとした人はまだいません。当初、ダンスはコンピューターシミュレーションプログラムを使用して作成されました。このプログラムでは、人間のダンスの動きがロボットの物理的能力に適合していました。特定の動きを選択した後、シミュレーションがエンジニアに示されました。彼らは画面を見て、「簡単だろう!」、「難しいだろう!」、「これは私を怖がらせる!」のようなことを言いました。私たちがプロジェクトに取り組んでいる間、ロボットのバレエの動きが高レベルでプログラムされた助けを借りて、一連のツールが開発されました。したがって、ビデオに示されているダンスは台本ではありません、すべての細部が手動で記録される場合、これは、個別に開発された要素を組み合わせてデータの配列に変換し、それをマシンにロードするソフトウェアパイプラインの製品です。
最も難しかったのは、回転運動をプログラムすることでした。なぜなら、それらは走ったりジャンプしたりするときに使用される要素と最も異なるからです。しかし、すでに練習された動きを実行するために必要な器用さとバランスは、ダンスをプログラミングするのに十分であることが証明されました。この実験の前は、主な重点は脚の動き、ジャンプ、そして走ることでした。この場合、ロボットの下半身が最もよく使われます。行動パターンの複雑さを増す次のステップは、手を使って押したり引いたりして、ダンスの動きを発達させることです。チームにとっての新たな課題の1つは、ロボットの上半身でモビリティを拡大することでした。
アトラスは機械学習コントローラーを使用しませんが、会社が再帰制御と呼ぶものを使用します(ダイナミクスと平衡を考慮した予測モデルと連携し、オンラインモードとオフラインモードの両方で軌道を最適化する予測コントローラー)。
この実験により、ロボットの信頼性と機能について多くのことが明らかになりました。商用ロボットSpotは、純粋に研究用のAtlasモデルとは対照的に、連続動作用に設計されました。彼は素晴らしい結果を示し、ほとんどメンテナンスなしで一日中踊ることができました。アトラスのコピーは数枚しか作成されていません。これらは、長期間の継続的な操作を目的としたものではありません。この点で、それらはヘリコプターのようなものであり、飛行時間よりも準備とメンテナンスの時間が長くなります。スポットは、サービスよりも運転する車のようなものです。
アトラスはこのプログラムのために特別に修正する必要があり、そのパワーを高めました。これらのロボットが示すトリックとジャンプは非常に鋭いですが、ダンスの動きにはさらにスピードと強さが必要です。
会社がどのようにさらに発展するかを言うのは難しいです。マーク自身はもう若くはなく、71歳です。 GoogleはBDで商業的な可能性を見つけることができませんでした。ソフトバンクが会社を買収したとき、取引金額は明らかにされていなかったので、韓国の自動車大手へのBDの売却が有益であったかどうかを判断するのは難しい。同社がSoftbankを利用していた期間中、特別な商業的成功は見られなかったようです。現代は、同社を利用して自動車の自動操縦装置を開発し、生産を自動化したいと考えています。たぶん彼女はBDとの提携からいくつかの実用的な利益を得ることができます。
事実、マークと彼の同僚は大文字の科学者です。彼らは、知識を収益化することを考えずに、最も純粋な形で研究を行っています。 30年以上かけて得られた理論的知識は膨大です。近い将来に実用化されるかどうかは非常に難しい。これは応用工学研究であるように思われますが、理論物理学や高等数学からはほど遠い、何世紀にもわたって主張されていない研究には多くの共通点があります。たとえば、主な制限の1つは栄養です。実験ロボット チータースタンドアロンでの使用も考えられていませんでした。それは技術の侵入のためのテストベンチであり、コンセントへの恒久的な接続なしでは機能しませんでした。Big Dogの場合、主な問題は、Pyatnyshkaの自律性(アタッチメントを除いてもわずか1時間半)の内部燃焼エンジンと、歩行者のような速度でした。
コントローラーでの機械学習の使用は、別の技術的なブレークスルーにつながる可能性があります。おそらく、より容量が大きくコンパクトな電源を発明するでしょう。会社の将来を予測することは困難です。彼らの幸運を祈りましょう!

