
数年前、ベングリオン大学の科学者 がコンパクトなロボット、ライジングスター(RSTAR)を作成しました。現在、彼には同様のデザインのパートナーであるBig STAR(BSTAR)がありますが、新しいロボットのサイズは6倍になっています。タンデムは、生産性を高め、ロボットの多様性を改善し、ロボットの脆弱性を軽減することが期待されています。 RSTARとBSTARは、オフロードや起伏の多い地形で移動が必要な場合の検索およびレスキュー操作で使用されます。
STARロボットは、ベングリオン大学の科学者DavidZarroukと同僚によって作成されました。彼の最初のデザインでは、ザルクは構造の自律性に最大限の注意を払いました。最初のSTARバージョンは、非常に自律的で操作しやすいことが判明しました。ロボットは環境条件に応じて簡単に変形します。したがって、RSTARにはローターがあり、障害物を飛び回ることができます。さらに、ロボットには膨張可能な水泳タンクがあります。設計が成功したことを見て、開発チームはさらに先に進むことにしました。その結果、RSTARには兄のBSTARがいます。
ビッグスターの特徴
BSTARロボット には次の特徴があります。
- 最大1.4m / sの構造物の移動速度。
- ロボットのペイロード> 5 kg;
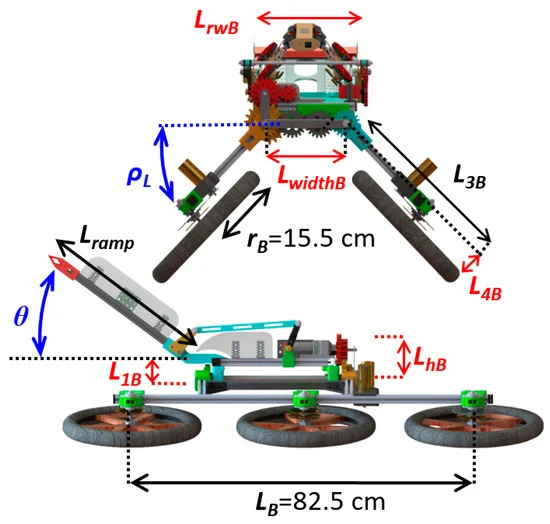
- 後輪軸から前輪軸までの構造の長さ-82.5cm;
- RSTARを運ぶための格納式の「テール」。
- スライド構造;
- 最小折り畳み高さ-21cm;
- 5200mAhの容量を持つ2つのリチウムポリマー電池。
- 重量-9.8kg。
ロボットは起伏の多い地形を移動することができます。BSTARとRSTARの相乗効果により、ナビゲーション機能と障害物除去機能が向上することが期待されます。さらに、大きなロボットは小さなRSTARの充電器として機能することができます。
ロボットは、大量のペイロード(バッテリー、カメラ、通信機器、その他の捜索救助活動用センサー)の輸送に適しています。
ロボットは、ArduinoUnoコントローラーと2つのRobotClawECSコントローラーによって制御されます。
最初のイスラエルのスター

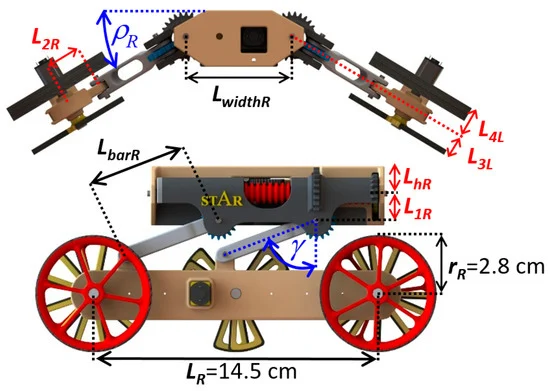
多機能ロボットRSTAR は2018年に登場しました。アダプティブデザインの変更により、水平面や垂直面を移動したり、車輪に乗ったり這ったりすることができます。ロボットは外部条件にすばやく適応します。ホイールフレーム間の角度を変更したり、ボディと平行に前後に動かしたりできます。
さらに、RSTARは重心を変更することができます。彼は自分には高すぎる障害物を乗り越え、中央を動かして安全に乗り越えることができます。
ロボット は4本のロッドを備えた延長機構を備えているため、体と脚の間の距離を広げ、壁の間を移動することができます。
機動性を高めるために、ロボットにホイールまたはスポークサポートを装備することができます。彼は逆さまに走ることができ、カタツムリの歩行の助けを借りて、彼の車輪の直径よりも大きい障害物を這うことができます。
ロボットには800mAhのLiPOバッテリーが1つ装備されていますが、より自律的にする計画があります。操縦可能なロボットの最小の高さは3.5cmであるため、非常に狭くて手の届きにくい場所をナビゲートできます。ロボットの最高速度は最大0.8m / sです。建設重量-0.38kg。
2つ星の連合
一方で、BSTARとRSTARは似たようなデザインで、6対1のスケールでしか作られていません。しかし、BSTARのサイズが大きいため、一部の部品を交換する必要があり ました。
BSTARは金属フレームを使用し、RSTARはプラスチックフレームを使用します。
ロボットの重要な新しい設計要素は、格納式の「テール」、つまり後部の可動プラットフォームです。プラットフォームは、負方向と正方向の傾斜角度を変更できます。 「テール」の主な目的は、小さなRSTARを運ぶことです。合計3人の「ロボットの子供」が親サイトに収まります。
このサイトは、さまざまなケースで追加の操作に使用できます。たとえば、BSTARサイトに入るRSTARは、高所から障害物を検査することができます。
上記のように、赤ちゃんはその「相対的な」バッテリーから充電されます。
計画どおり、2つの多機能ロボットのコラボレーションにより、生産性と汎用性が大幅に向上し、地形探索の速度が向上し、可能な操作の範囲が拡大するはずです。
