。これが私たちのヒーローは、現時点ではここで
NASAとJPLの代表は、すぐに火星への探査車の成功到着後、記者会見を与え、その後、追加の情報を共有-ローバーの未来の運命について。「7分間の恐怖」は誰も怖がらせませんでしたが (それは彼らを心配させましたが)、今最も興味深い部分が始まります-赤い惑星の探検。
私たちはローバーがどこにあるかを知っていますが、私たちは自分の目でそれを取り巻くものを見たいと思っています。そしてすぐにそのような機会が現れるでしょう。さらに、もっと面白いことがたくさんあります。
ビリー、証拠はどこにありますか?
着陸のビデオと写真について話している。以前のローバーとは異なり、ローバーには一度に複数のマイクが装備されているため、ビデオは音声付きになります。ローバーはビデオを撮影し、高解像度カメラで写真を撮りました。そして今、このコンテンツはかなり「重い」ので、地球に送る必要があります。このプロセスには数日かかり、火星衛星の火星オデッセイがリレーとして使用されます。それが電波視程の範囲内にあるとき、データの一部はそれにリダイレクトされ、続いて別のオービター、火星微量気体のターンが続きます。後者は、ローバーから受信したより多くのデータを地球に送信できるようになります。一般に、これは地球が月曜日までにすべてのコンテンツを受け取るのに十分です 。
ちなみに、最初の写真はレンズが透明な保護カバーで覆われたカメラで撮影されました。これらのカバーはまもなく削除され、写真はより鮮明になります。最初の写真は低解像度のナビゲーションカメラで撮影されたものであり、着陸時に重砲が介入しなかったことは注目に値します。
今後2日間で、指向性ローバーアンテナと実質的に他のすべての機器が配備され、運用の準備が整います。
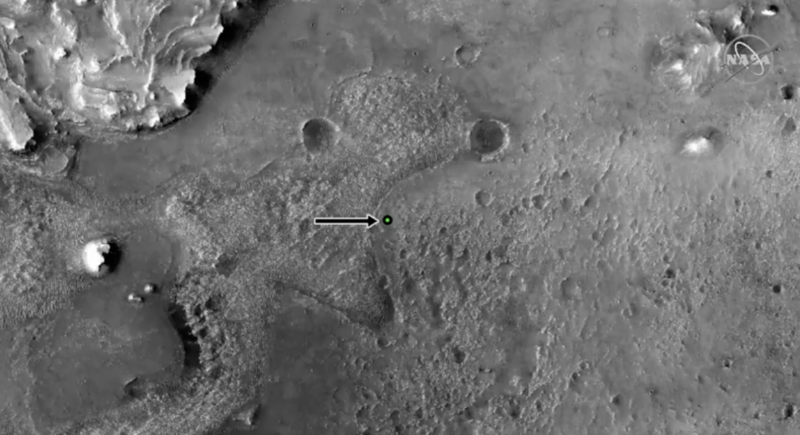
ローバーの位置については、計算点からわずか1.7 kmの水面に沈み、ほぼ理想的な結果でした。下の画像は、ローバーが配置されている地域の標高差を示しています。青い領域は、ナビゲートしやすく、ローバーを発射するのに理想的な平坦な地形です。より危険な領域は黄色でマークされています。さて、高さは赤でマークされていますが、これは下降する価値がなく、ローバーが転がらないように今は避ける必要があります。

自動着陸およびナビゲーションシステムは完全に機能しました。忍耐力は今安全です。しかし、科学者たちは現在の地域に砂やほこりがたくさんあるという事実にあまり満足していないので、ローバーはできるだけ早く別の場所に送られる予定です。
ソフトウェアの更新とフライト
しかし、これは今は起こりません。2日間のテストと、すべてのツールの段階的な試運転が予定されています。非常に重要なステップは、ナビゲーションおよびローバーモーションコントロールソフトウェアをダウンロードすることです。このソフトウェアの作業は、火星へのローバーの旅行中に行われました。これですべての準備が整いました。あとは、ソフトウェアを転送してロボットにロードするだけです。
この段階が過ぎると、科学者たちは「忍耐力」の着陸に関するニュースで言及された飛行ドローンを打ち上げることを計画しています。ローバーは、いくつかの基準を満たす座席を見つける必要があります。その後、ドローンが水面に降ろされ、ローバーがこの場所から離れ、ミニヘリコプターが赤い惑星の空域を探索し始めます。打ち上げには約10火星日かかります。次に、ドローンの機能をテストするためにさらに30日間。
| パラメータ | |
|---|---|
| 1,8 | |
| 1,2 | |
| 0,8 | |
| 2400
|
|
| 14 3
|
|
| 220 ( )
|
|
| 1 5 30
|
|
| 300
|
|
| 10
|
|
| : 10 /
: 3 / |
|
| 35—40 ⋅ (130—140 )
|
|
| 2 |
|
回転翼航空機は、直径1メートル強の逆回転同軸プロペラを使用しています。このドローンの「側面」からすべてを見ることができる高解像度カメラが装備されています。無線送信機も内部に設置されており、ローバーに情報を送信します。さて、彼は今度はこれらすべてを地球に送ります。ナビゲーションにはソーラートラッカー付きのカメラを使用しています。

次の段階は岩石のサンプリングです。ローバーが着陸した地域は、科学者にとって非常に興味深いものです。まず第一に、この地域は地質学的に異質であるため、大まかに言えば、見るべきものがあります。
そして、何?
長期的には、Perseveranceの目標は、科学者が古代の川の三角州であると信じているものに到達することです。それは火星の歴史の「湿った期間」の間に形成されました。通常、生命が激しく沸騰しているのは三角州です(もちろん、地球上で)。したがって、科学者は、もちろん火星に存在した場合、この生命の痕跡を見つけることを望んでいます。デルタはローバーの現在の場所からわずか2kmなので、比較的早くそこに着くことができます。
しかし現在、短期的には、科学者とエンジニアが機器を準備し、ローバーの「長距離」アンテナを配備しています。
さて、私たちは彼らに幸運と現在のすべてのタスクの迅速な解決を願っています。
