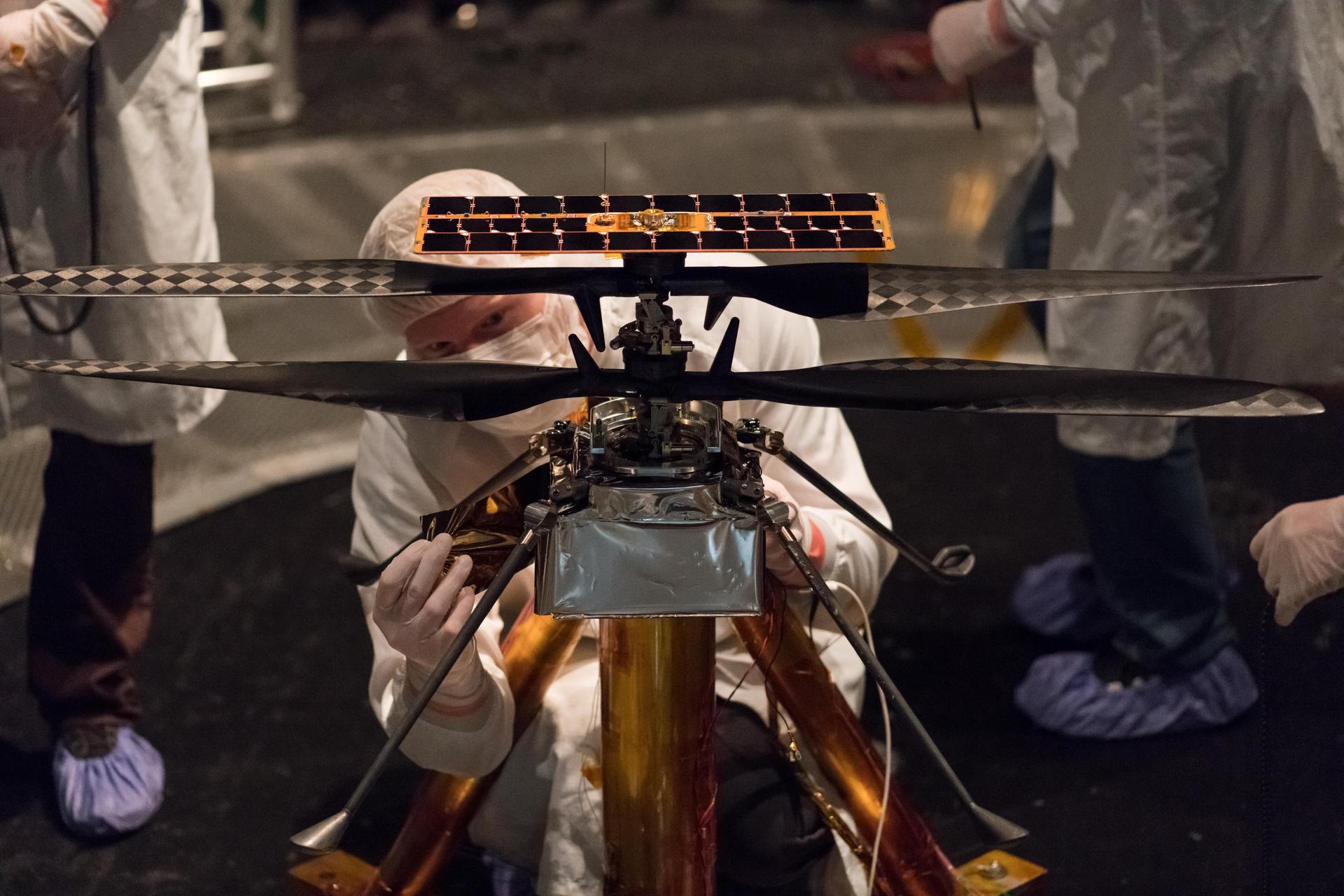
NASAは最近 、ローバーと一緒に赤い惑星の表面に着陸したIngenuityローバーの詳細を明らかにしました。間もなく、ローバーは火星の空域をマスターしようとしますが、今のところ、NASAはこの旅の詳細について話し合っています。
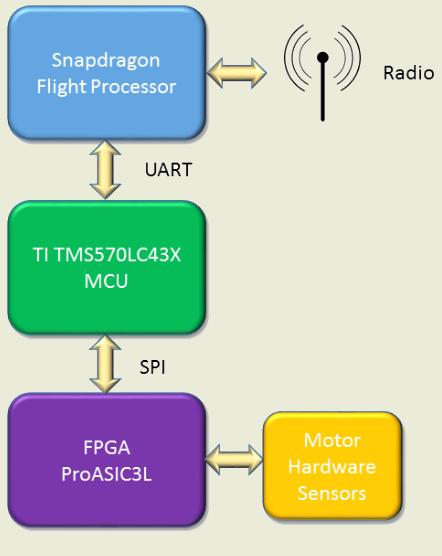
したがって、Marsplaneの「ハードウェア」は、QualcommのSoC Snapdragon801を搭載したボードに基づいています。ソフトウェア-Linuxおよびオープンソース。火星に送られたシステムでLinuxベースのソフトウェアが使用されるのはこれが初めてだと同庁は述べた。ハードウェアとソフトウェアの両方のオープンでアクセス可能な要素を使用することで、愛好家はデザインを繰り返したり、独自の何かを作成したりできます。
ハードウェア は、ローバーが必要とする高性能を提供します。事実、通常の飛行では、毎秒500サイクルの頻度で制御ループを操作し、さらに毎秒30フレームの頻度で画像分析を行う必要があります。
SoC Snapdragon 801(4コア、2.26 GHz、2 GB RAM、32 GBフラッシュ)は、Linuxに基づく基本的なシステム環境の運用を担当します。次のような高レベルの操作を実行し
ます。•カメラからの画像の分析に基づくビジュアルナビゲーション。
• データ管理。
•コマンド処理。
•テレメトリの形成。
•ワイヤレスチャネルの維持。
UARTインターフェイスを介して、プロセッサは2つのマイクロコントローラに接続されます。これらはMCU Texas Instruments TMS570LC43x、ARM Cortex-R5F、300 MHz、512 KB RAM、4 MBフラッシュ、UART、SPI、GPIOです。彼らはさまざまな飛行制御機能を担当しています。さらに、障害が発生した場合の冗長性にも使用されるため、それらに到達する情報は複製されます。
マイクロコントローラーの1つだけが関与しますが、問題が発生した場合は2つ目のマイクロコントローラーが動作し、問題のある「同僚」を置き換えて、主要な機能を即座に傍受できます。FPGA MicroSemi ProASIC3Lは、センサーからマイクロコントローラーへの情報の転送、および回転翼フライヤーのブレードを制御するアクチュエーターとの相互作用を担当します。また、障害が発生した場合は予備のマイクロコントローラーに切り替えます。
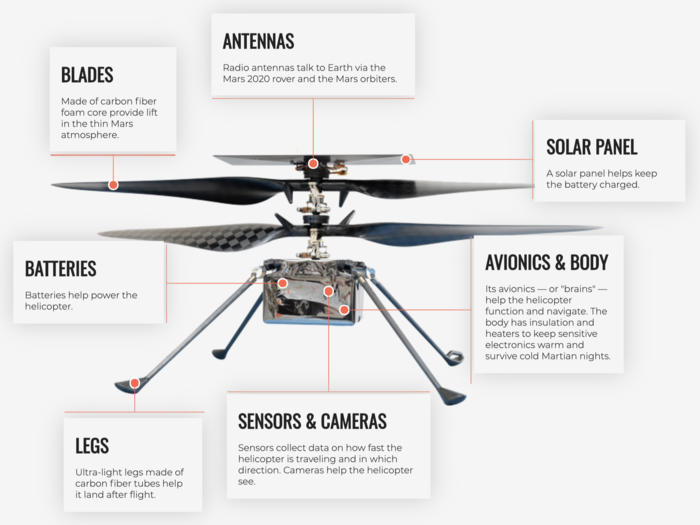
前回の記事では、この装置には科学機器がないと言われていました。しかし、もちろん、これは単なる空飛ぶ空白ではありません。火星の宇宙船には、SparkFunElectronicsのレーザー高度計が装備されています。彼女はオープンソースソフトウェアの開発を専門としており、さらに、まさにOSHWという用語のオープンソースハードウェアの創設者の1人でもあります。さらに、ローバーにはジャイロスタビライザー(IMU)やビデオカメラなどのコンポーネントが装備されています。
2台のカメラがあります。そのうちの1つであるVGAは、ナビゲーションデバイスとして使用され、フレームごとの比較を通じて、位置、移動方向、および速度を決定する役割を果たします。ただし、2番目のカメラであるカラー13 MPは、その領域の撮影に使用されます。火星の航空写真-私たちは未来に住んでいます!
ロケットのシステムのほとんどは、NASAの専門家、つまりNASA JPL(ジェット推進研究所)の研究所で開発されました。同時に、設計に使用されるコンポーネントは一意ではありませんが、一般的に、小型および超小型の人工地球衛星(cubsats)用に特別に作成され、オープンプラットフォームF Prime( F´)、Apache2.0ライセンスの下で配布されます。
F Primeは、飛行制御システムおよび関連するソフトウェア要素を迅速に設計および展開する機能を提供します。そうすることで、フライトソフトウェアは、明確に定義されたプログラミングインターフェイスを備えた個別のコンポーネントに分割されます。さらに、開発者は、メッセージキューを処理し、マルチスレッドを編成するためのC ++フレームワークに加えて、コンポーネントをリンクしてコードを自動的に生成できるモデリングツールを自由に利用できます。
そして、火星の宇宙船は火星で何をしますか?
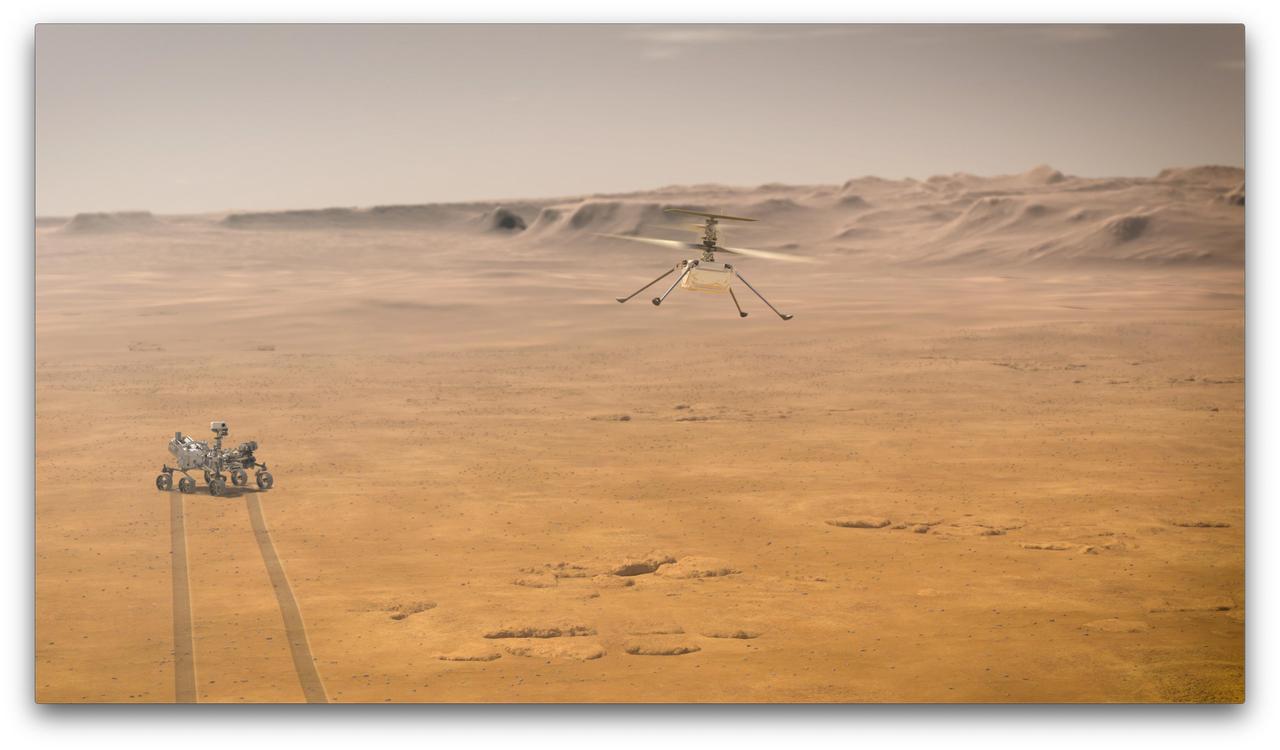
要するに、それは完全に自動化されたモードで、離陸し、特定のルートに沿って飛行し、ドッキングします-そしてこれらすべては人間の介入なしに行われます。ヘリコプターの重量は1.8kgで、非常に軽量で、カーボンファイバー製の長さ1.2mのプロペラ2基によって飛行中に誘導されます。
いくつかのフライトがあり、それぞれの所要時間は90秒です。宇宙船は地球から約10光分の距離にあるので、エンジニアがいくら欲しがっていても、それを制御する方法はありません。 3回の飛行はすべて1か所で行われます。ドローンは3回すべて同じ地点に着陸します。 NASAはドローンの使用に約1か月かかるため、すべてが順調に進んだ場合、NASAは別の飛行を行い、4回目の新しい場所に着陸することができます。初めて、ドローンは単に離陸して着陸するだけです-それは簡単です。そして、すべてがうまくいけば、エンジニアによると、彼らは彼を輪になって運転し、より高く飛んで、さらにいくつかの「エキゾチック」を実行しようとすることができます。
なぜ30日しかないのですか?ドローンは離着陸技術の概念実証だからです。すべてが可能な限りうまくいったとしても、科学者はローバーを離れてローバーを取り上げます-プロジェクトのリソースは限られています。
先に述べたように、ドローンの主な任務は、火星の希薄な大気(地球の密度のわずか1%)で飛行する可能性と、選択した技術の有効性を証明することです。もちろん、システムは地球上でテストされましたが、フィールドテストは常に最終段階でした。さて、今、テストサイトは地球から10光分です、あなたは何ができますか。

下から火星の宇宙船
火星の宇宙船が離陸すると、いくつかの写真が撮られますが、これはすでに科学的な価値があります。この解像度で火星の軌道から写真を撮ることはできません。NASAは、すべてがうまくいけば、すでに大きなローバーを火星に送ることができます。火星は、ローバーが現在数日で移動する距離を数分でカバーすることができます。
