
今日、NASAは赤い惑星を横切る忍耐力ローバーの動きの始まりについてのメッセージをツイートしまし た。ローバーはシャーシをチェックするために数メートル運転しました。すべてが順調に終了し、システムは正常に機能しています。さらに、ローバーは独自のトラックを撮影しました。総到着時間は33分で、その間にローバーは6.5メートルをカバーしました。
あなたが知る限り、ローバーは順調です。しかし、覚えていれば、ローバーはスカイクレーンを使用して表面に着陸しました。ケーブルの助けを借りてソフトランディングを提供したシステムは、ある時点でローバーから分離され、残りの燃料の蓄えを使用して飛び去りました。しかし、彼女は正確にどこに行き、どこまで行くことができましたか?数えましょう あなた自身。
NASAはすでに火星の表面に落ちたプラットフォームの写真をアップロードしてい ます。代理店はその正確な場所を知っています。しかし、プラットフォームがどれだけ移動したかを計算するのはクールです。最初の着陸データとローバーから送信されたビデオを自由に使用できます。
計算には、着陸プラットフォームの角度サイズを使用します。
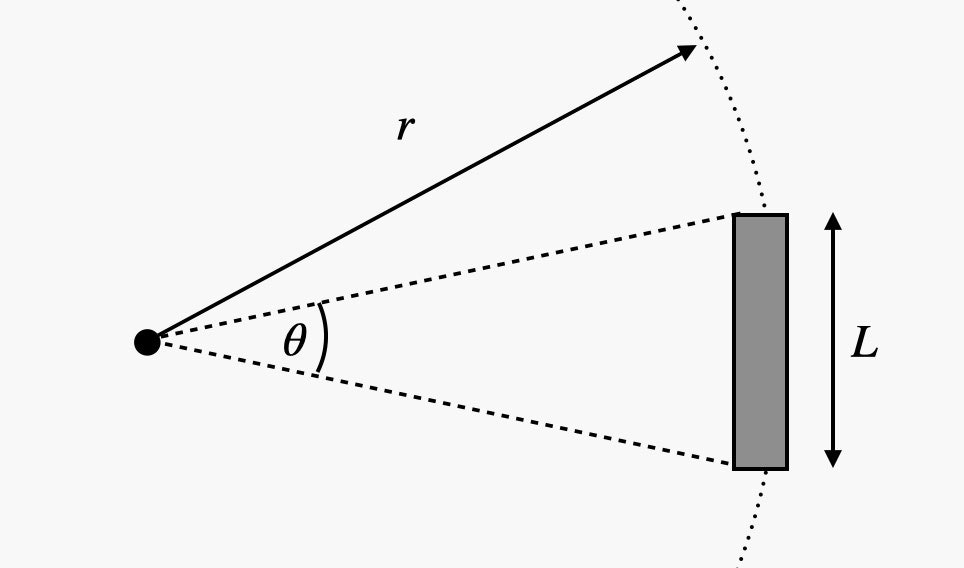
Habréでは、角度のサイズについて話すのはほとんど意味がないので、すぐに計算に取り掛かりましょう。
角度サイズの計算は非常に簡単です。式は次のとおりです。
なぜ角度サイズが必要なのですか?まあ、それを知っていて、実際のサイズを知っていれば、オブジェクトまでの距離を簡単に決定できます-それはrになります。理想的な計算オプションは、フラットペグのみを使用することです。これを使用して計算を実行するのが最も簡単です。しかし、ペグではなくプラットフォームがあるので、もう少し難しいでしょう。しかし、それでも、計算中に問題はないはずです。
最初にすべきことは、ローバーのカメラが上を向いている視野を決定することです。正確な特性はないので、概算してみましょう。これは、着陸前にローバーがケーブルから吊り下げられたプラットフォームです。

NASAによると、ケーブルの長さは6.4メートルなので、この写真の®がわかります。さらに、着陸ステージの長さを決定することができます。その幅をとると、2.69メートルであり、ローバーから見た実際の角度サイズは0.42ラジアンです。この数値を使用して、0.627ラジアン(35.9度)の視野角(FOV)でビデオフレーム全体の幅を設定しましょう。
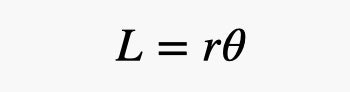
これはすべて、さらなる計算にとって非常に重要です。このデータを使用して、着陸プラットフォームの角度サイズを測定し、ローバーまでの距離を計算できます。これを行うには、特別なツールであるトラッカービデオ分析を使用できます。ビデオ内のオブジェクトのサイズを分析することができます。そのようなスケジュールを立てます。
グラフは放物線であり、プラットフォームの一定の加速を示していると考えられます。しかし、そのようなことは何も起こらなかったようです。プラットフォームが加速した場合、それは最小限でした。速度を計算すると、約8.2 m / sになります。
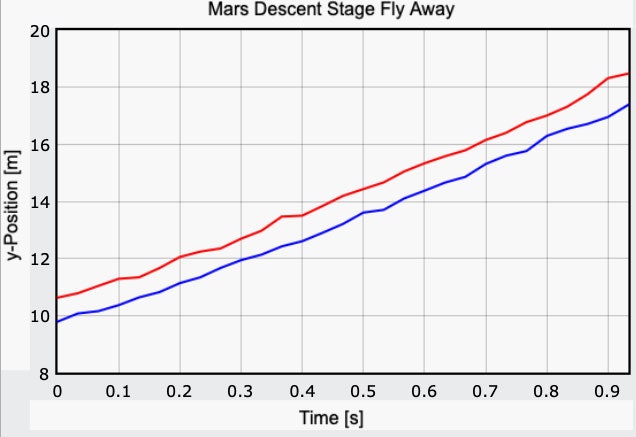
やめる!結局のところ、私たちは何か他のものを持っています。事実は、何度も言われているように、着陸台が斜めに離れているということです。そして、これは理にかなっています-プラットフォームがちょうど飛んだ場合、すべての燃料を使用した後、この構造全体が下向きに崩壊します-ローバーに直接。ビデオは傾斜角を決定することを可能にします。これが役立つグラフと式です。
モーターまでの既知の距離と見かけの距離を使用して、垂直から52度の傾斜角を取得します。この指標はさらなる計算に必要なので、すべてが正しいことを期待しましょう。
プラットフォームの動き
これで、重要な物理的問題に取り組む準備が整いました。こんな感じです。
火星の着陸船は、パーセベランスローバーから安全な距離に到達するために出発操作を実行しています。モジュールはスラスターを始動して、垂直から52度の発射角度で8.2 m / sの速度を達成します。火星の重力場が3.7N / kgの場合、ローバーからどれだけ離れたところに落下しますか?空気抵抗はごくわずかであるとみなすことができます。
問題の定式化があります。今、私たちは答えが必要です。ここで重要なのは、水平方向(x方向と呼びましょう)の移動が一定の速度で行われることです。降下速度(y方向)については、重力による加速度-g(g = 3.7 N / kg)があります。それは一定であり、垂直方向にのみ作用するため、タスクを2つに分割できます。実際、水平面での動きと垂直面での動きです。1つのタスクのこれら2つの要素は独立しており、時間によってのみ接続されます。
垂直方向に移動することから始めましょう。

必要な計算を実行するには、コサインを使用します。一定の加速度での運動の次の方程式が役立ちます。

開始位置と終了位置はゼロです(これがサーフェスです)。これは、時間を決定するのに役立つ式です。

6.4 mの距離でy0を使用する場合(これは現実的です)、2次方程式を使用する必要があります。それほど難しいことではありません。ただし、降下車両の水平移動にも時間を使用できます。これが水平運動の方程式です。
速度は角度の正弦に依存します。これで、x0をゼロのままにして、時間を上記の式に置き換えることができます。その結果、これが得られます。
値を代入すると、プラットフォームが移動した距離は17.6メートルであることがわかります。しかし、いいえ、これはまったく当てはまりません。これはNASAが公開した写真からわかります。画像によると、プラットフォームはローバーから約1kmの距離に着陸しました。問題の状態を変更します。
ローバーに危険を及ぼさないために、プラットフォームは約1kmの距離で飛んでいく必要があります。降下速度-約52度の傾斜角で8.2m / s。エンジンが停止する前に、プラットフォームはどのくらいの高さまで上昇しますか?この式を使用します。

次に、時間を使用して次の方程式を解きます。

計算すると、垂直スタートの指標は43kmであることがわかります。何故ですか?重要なのは、エンジンが起動したときにプラットフォームが高速化したことです。
Pythonでいくつかの計算をしてみましょう。計算は2つの部分で構成されます。まず、一定時間、ロケットは52度の一定の加速度で飛行します。時間と加速度を選択して、火星の表面での体の落下を計算するだけです。これがすべての計算を行うプログラムのコードです。
GlowScript 3.0 VPython
v0=8.2
g=3.7
theta=52*pi/180
x=1000
y0=.5*g*(x/(v0*sin(theta)))**2-x*cos(theta)/sin(theta)
tgraph=graph(width=550, height=350, xtitle="x-position [m]", ytitle="yx-Position [m]", title="Trajectory of Descent Stage Fly Away")
f1=gcurve(color=color.blue)
#starting position
x=0
y=6.4
#rocket firing time
tf=7
#rocket acceleration
a=6
#initial velocity
vy=v0*cos(theta)
vx=v0*sin(theta)
#time
t=0
dt=0.01
#rockets firing
while t<tf:
vy=vy+a*cos(theta)*dt
vx=vx+a*sin(theta)*dt
y=y+vy*dt
x=x+vx*dt
t=t+dt
f1.plot(x,y)
#to record max height
ymax=0
#projectile motion
while y>=0:
vy=vy-g*dt
y=y+vy*dt
x=x+vx*dt
if vy<0.1:
ymax=y
t=t+dt
f1.plot(x,y)
print("Descent Range = ",x," m")
print("Maximum Altitude = ",ymax," m")
print("Fly Away Time = ",t, " seconds")
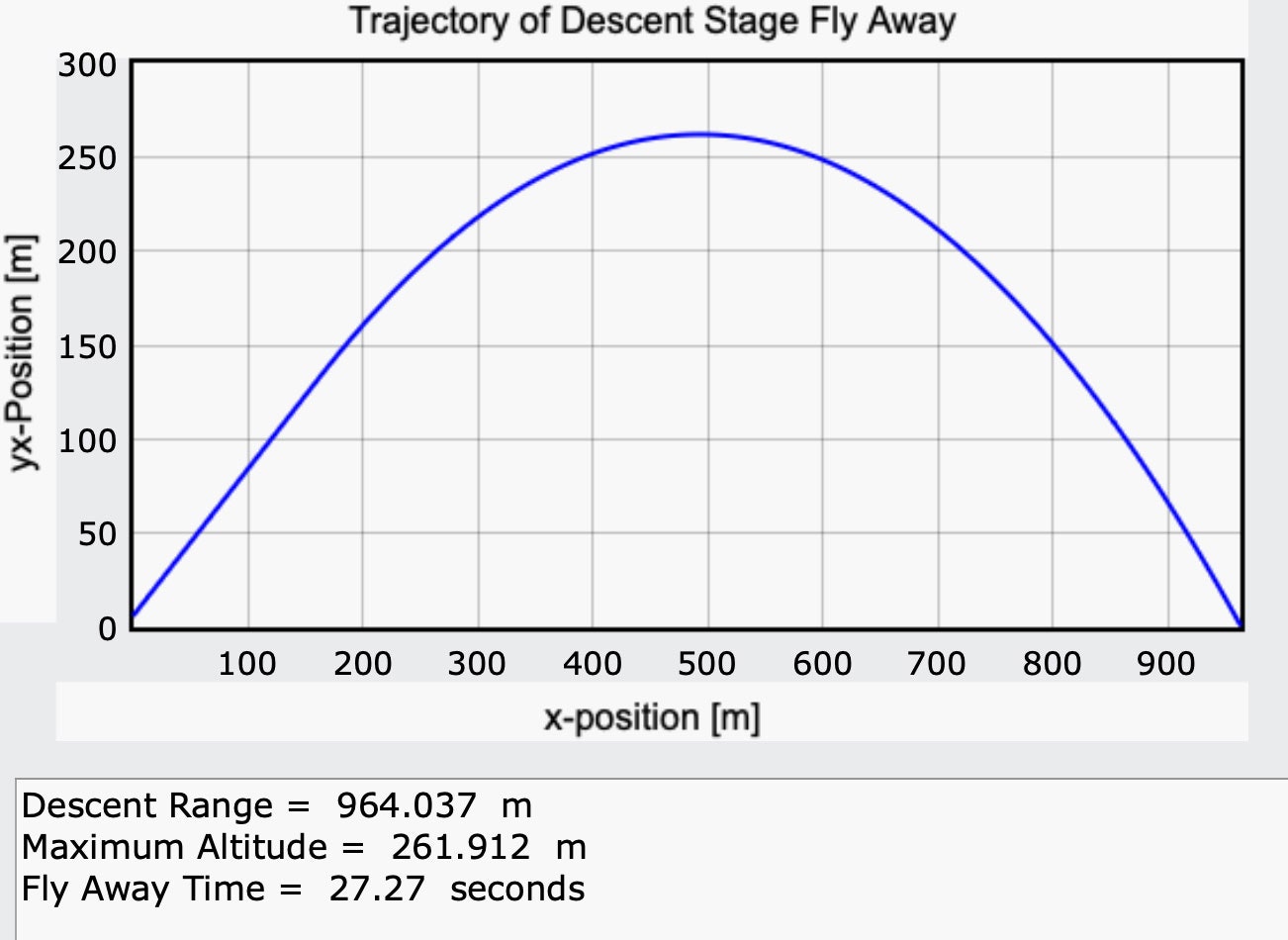
計算には、プラットフォームの加速度を6 m / s 2とし、エンジンの動作時間を7秒とします。そして、私たちはすでに964メートルの通常の値を取得しています。これはすでに真実に非常に似ています。最後に。
