Windowsのラップトップのサウンドトラックとオーディオトラックの音量を赤外線リモコンから切り替えたいと思いました。Arduino uno、ブレッドボード、赤外線センサー、ラップトップ、そして実際には赤外線リモコンを備えたワイヤーの束。
アイデアはあります、鉄はありますが、理論は不完全です。コンピューターにリモコンの赤外線信号を理解させ、必要なアクションを実行するにはどうすればよいですか?ブレッドボードの赤外線センサーを介してリモートコントロール信号を受信し、USB経由でラップトップにメッセージを送信するためにarduinoを使用することにしました。これには、すべてがどのように機能するかについて少なくともある程度の知識が必要でした。
調査することになりました。
リモコンにArduinoをご紹介します
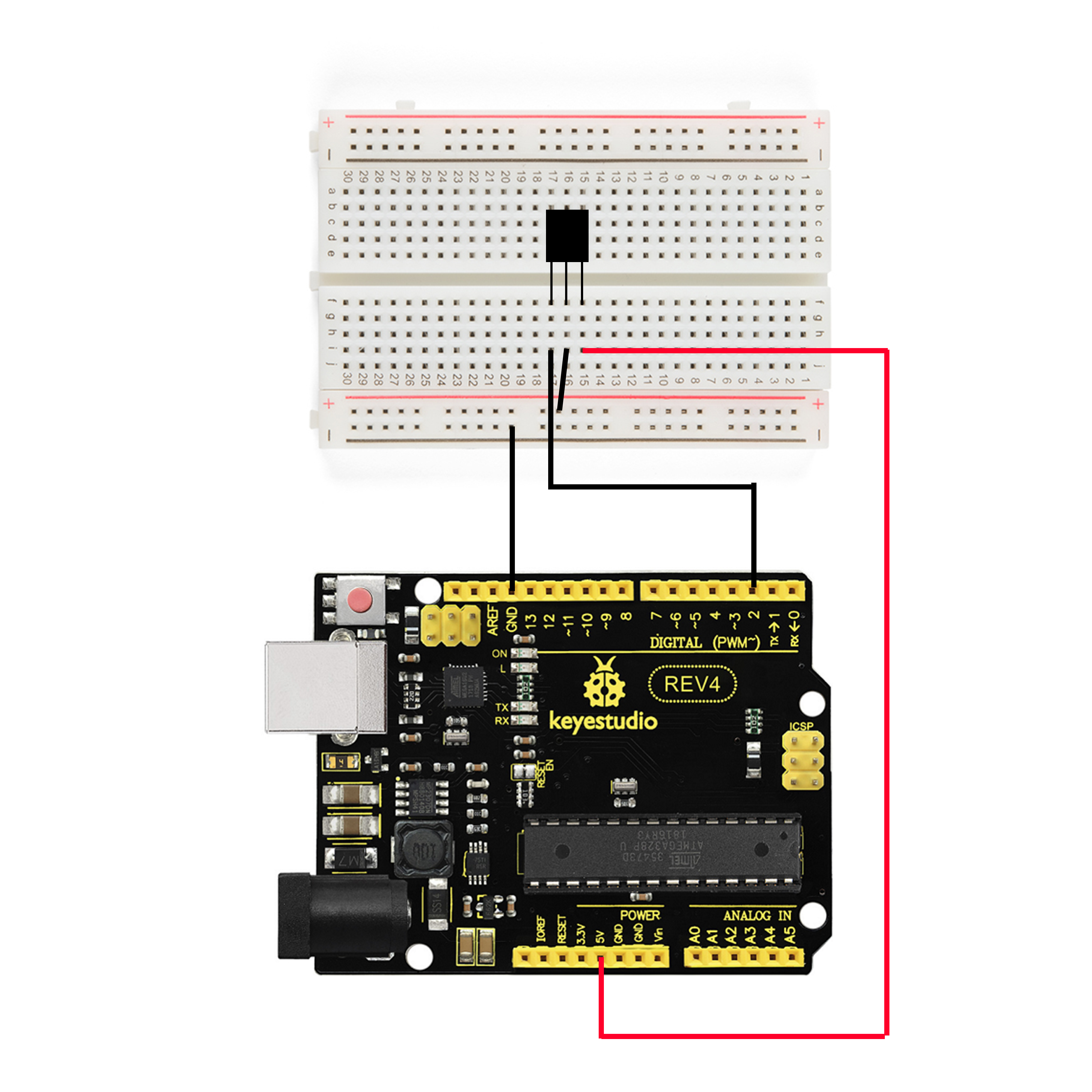
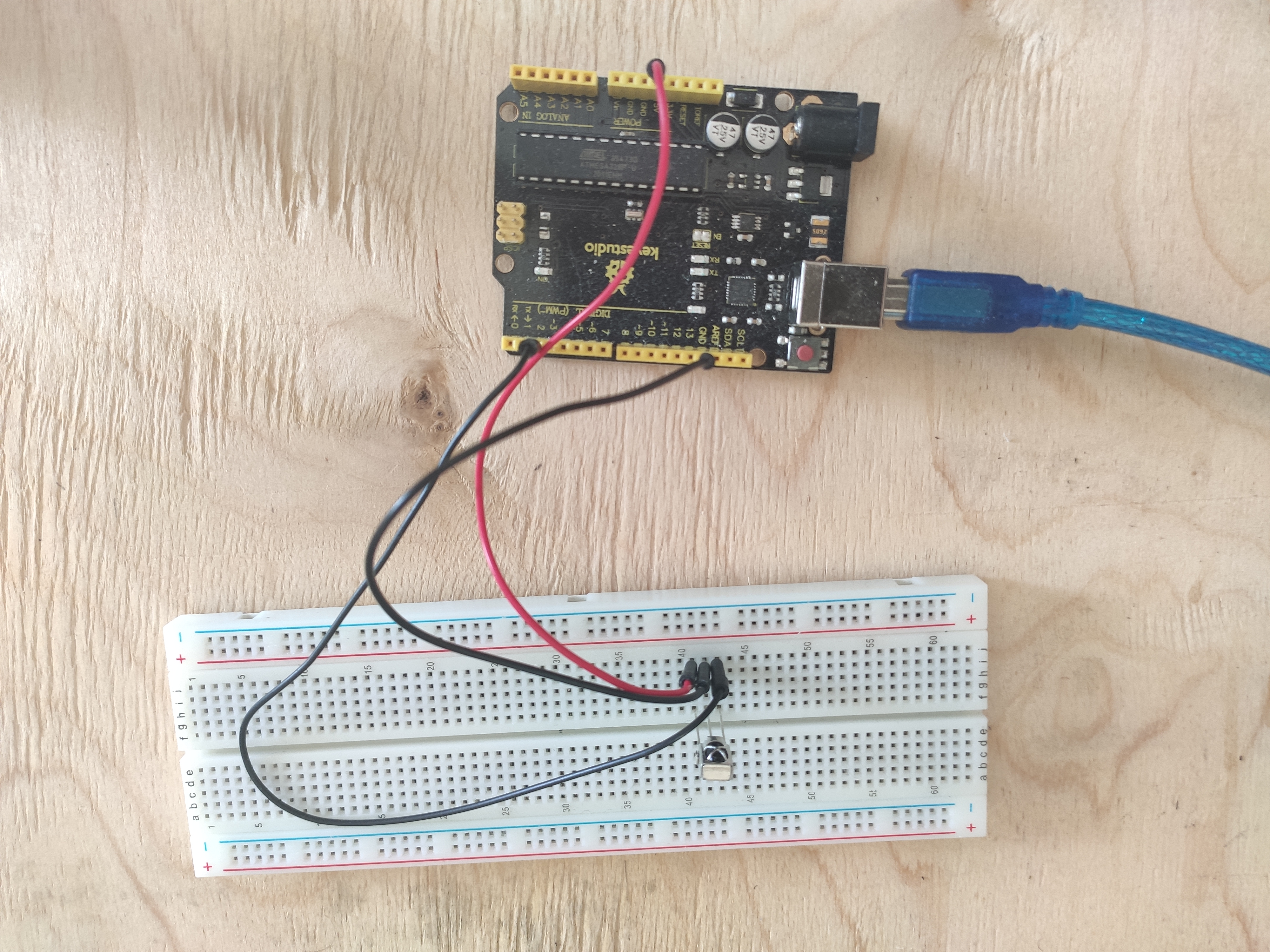
赤外線リモコンから信号を受信するには、受信機が必要です。受信機は、次のスキームに従ってブレッドボードを介してarduinoに接続します。

arduinoがどのプロトコルでどのコマンドで信号が送信されるかを理解するために、IRremoteライブラリがあります。これは、ArduinoIDEの新しいバージョンでは標準ライブラリから追加できます。
(/ ). 5 .
, , , IrReceiver.decodedIRData.decodedRawData. , . . , . , :
#include <IRremote.h>
int IR_RECEIVE_PIN = 2; // 2-
long command;
void setup()
{
Serial.begin(9600);
IrReceiver.begin(IR_RECEIVE_PIN, ENABLE_LED_FEEDBACK);
}
void loop() {
if (IrReceiver.decode()) //
{
command = IrReceiver.decodedIRData.decodedRawData; /*
*/
switch(command) //
{
case 0xEA15FF00:
Serial.write("D"); delay(120);
break;
case 0xB946FF00:
Serial.write("U"); delay(120);
break;
case 0xBF40FF00:
Serial.write("P"); delay(120);
break;
case 0xBC43FF00:
Serial.write("N"); delay(120);
break;
case 0xBB44FF00:
Serial.write("R"); delay(120);
break;
}
IrReceiver.resume(); //
}
}
, , USB.
Windows
- . ++ Visual Studio Windows.h
, , SendInput :
INPUT Input = { 0 };
Input.type = INPUT_KEYBOARD;
Input.ki.wVk = VK_VOLUME_UP; /* ,
*/
SendInput(1, &Input, sizeof(Input));
ZeroMemory(&Input, sizeof(Input));
: (VK_VOLUME_UP, VK_VOLUME_DOWN); (VK_MEDIA_PLAY_PAUSE); "" (VK_MEDIA_NEXT_TRACK, VK_MEDIA_PREV_TRACK)
Serial port ?
USB, (Serial port), Windows COM , IBM PC. , , . Windows.h
#include <Windows.h>
#include <stdio.h>
#include <string.h>
int main(void)
{
HANDLE Port;
BOOL Status;
DCB dcbSerialParams = { 0 };
COMMTIMEOUTS timeouts = { 0 };
DWORD dwEventMask;
char ReadData;
DWORD NoBytesRead;
bool Esc = FALSE;
Port = CreateFile(L"\\\\.\\COM3", GENERIC_READ, 0, NULL, //
OPEN_EXISTING, 0, NULL);
if (Port == INVALID_HANDLE_VALUE)
{
printf("\nError to Get the COM state\n");
CloseHandle(Port);
}
else
{
printf("\nopening serial port is succesful\n");
}
dcbSerialParams.DCBlength = sizeof(dcbSerialParams);
Status = GetCommState(Port, &dcbSerialParams); //
if (Status == FALSE)
{
printf("\n Error to Get the COM state \n");
CloseHandle(Port);
}
dcbSerialParams.BaudRate = CBR_9600; //
dcbSerialParams.ByteSize = 8;
dcbSerialParams.StopBits = ONESTOPBIT;
dcbSerialParams.Parity = NOPARITY;
Status = SetCommState(Port, &dcbSerialParams);
if (Status == FALSE)
{
printf("\n Error to Setting DCB Structure \n ");
CloseHandle(Port);
}
timeouts.ReadIntervalTimeout = 10; /*
( ) */
timeouts.ReadTotalTimeoutConstant = 200;
timeouts.ReadTotalTimeoutMultiplier = 2;
if (SetCommTimeouts(Port, &timeouts) == FALSE)
{
printf("\n Error to Setting Timeouts");
CloseHandle(Port);
}
while (Esc == FALSE)
{
Status = SetCommMask(Port, EV_RXCHAR);
if (Status == FALSE)
{
printf("\nError to in Setting CommMask\n");
CloseHandle(Port);
}
Status = WaitCommEvent(Port, &dwEventMask, NULL); /*
( ) */
if (Status == FALSE)
{
printf("\nError! in Setting WaitCommEvent () \n");
CloseHandle(Port);
}
Status = ReadFile(Port, &ReadData, 3, &NoBytesRead, NULL); //
printf("\nNumber of bytes received = % d\n\n", sizeof(ReadData) - 1);
switch (ReadData) /*
*/
{
case 'U':
{
INPUT Input = { 0 };
Input.type = INPUT_KEYBOARD;
Input.ki.wVk = VK_VOLUME_UP;
SendInput(1, &Input, sizeof(Input));
ZeroMemory(&Input, sizeof(Input));
}
break;
case 'D':
{
INPUT Input = { 0 };
Input.type = INPUT_KEYBOARD;
Input.ki.wVk = VK_VOLUME_DOWN;
SendInput(1, &Input, sizeof(Input));
ZeroMemory(&Input, sizeof(Input));
}
break;
case 'P':
{
INPUT Input = { 0 };
Input.type = INPUT_KEYBOARD;
Input.ki.wVk = VK_MEDIA_PLAY_PAUSE;
SendInput(1, &Input, sizeof(Input));
ZeroMemory(&Input, sizeof(Input));
}
break;
case 'N':
{
INPUT Input = { 0 };
Input.type = INPUT_KEYBOARD;
Input.ki.wVk = VK_MEDIA_NEXT_TRACK;
SendInput(1, &Input, sizeof(Input));
ZeroMemory(&Input, sizeof(Input));
}
break;
case 'R':
{
INPUT Input = { 0 };
Input.type = INPUT_KEYBOARD;
Input.ki.wVk = VK_MEDIA_PREV_TRACK;
SendInput(1, &Input, sizeof(Input));
ZeroMemory(&Input, sizeof(Input));
}
break;
default:
printf("\n Error\n");
break;
}
PurgeComm(Port, PURGE_RXCLEAR); //
}
CloseHandle(Port); /* ,
*/
}
https://www.xanthium.in/Serial-Port-Programming-using-Win32-API
http://citforum.ru/hardware/articles/comports/
, , . : - .
この組み合わせ(リモート+仮想コード)は、OSのさまざまな部分を制御する可能性があります。たとえば、ボタンにプログラムを割り当てたり、リモコンからコントローラーのようなものを作成したりできます。しかし、私の意見では、最も便利なのはメディア管理です。