サイエンスフィクションのカテゴリーの作品を見ると、多くの一般的な要素を見つけることができます。もちろん、最も明白なものの1つは、ロボット、宇宙船、静止カメラなどの信じられないほどの技術です。ホログラムは、映画、ゲーム、映画に出演する頻度の点で、リーダーの間で自信を持ってランク付けすることができます。ホログラムの祖先は、当然のことながら、ファンデーションシリーズの小説でこのテクノロジーに言及しているアイザックアシモフです。ホログラムの最初の映画デビューは、ショーン・コネリー主演の1974年の映画「未来惑星ザルドス」でした。それ以来、ホログラムは事実上すべてのSF映画に登場し始め、テクノロジーが驚かされるのをやめ、プロットのツールとしてのその信じられないほどの多様性のために、時には完全に嫌悪感を引き起こし始めました。だが、一部の映画ファンの不満の不満にもかかわらず、世界中の科学者はこの信じられないほどの技術に強い関心を持っています。ブリガムヤングハム大学(米国)の研究者グループは、文字通り目の前で生き生きとしたホログラフィック画像を視覚化するためのテクノロジーの新しいバージョンを作成しました。この作品はすでにです Habréで取り上げましたが、詳しく見ていきましょう。動くホログラムの秘密は何ですか、それらの特徴は何ですか、そしてそれはすべてどのように見えますか?これらの質問に対する答えは、科学者のレポートにあります。行く。
研究の基礎
2018年に、科学者が光泳動*トラッピング( 光泳動トラップ)を使用した体積表示用のデバイスについて説明する作品(光泳動トラップ体積表示)が公開され ました 。デバイスの操作は、粒子を光泳動トラップに保持することに基づいています。光泳動トラップは、自由空間(最大1 cm 3)内の画像の各アクティブポイントを介して粒子をドラッグし ます。
* — , , () (), . .粒子が自由空間を移動すると、可視レーザーで照射され、人が見ることができる画像が形成されます。
この技術は、新規であり、多くの問題の解決が必要で、主なものは、1センチメートルから空き領域の量を増加さ 3 100センチメートルに 3と自由空間に仮想イメージを作成するために、体積ディスプレイの基本的なことができないことを排除します。 2番目の問題は、私たちが検討している研究の主要なタスクになりました。
画像#1
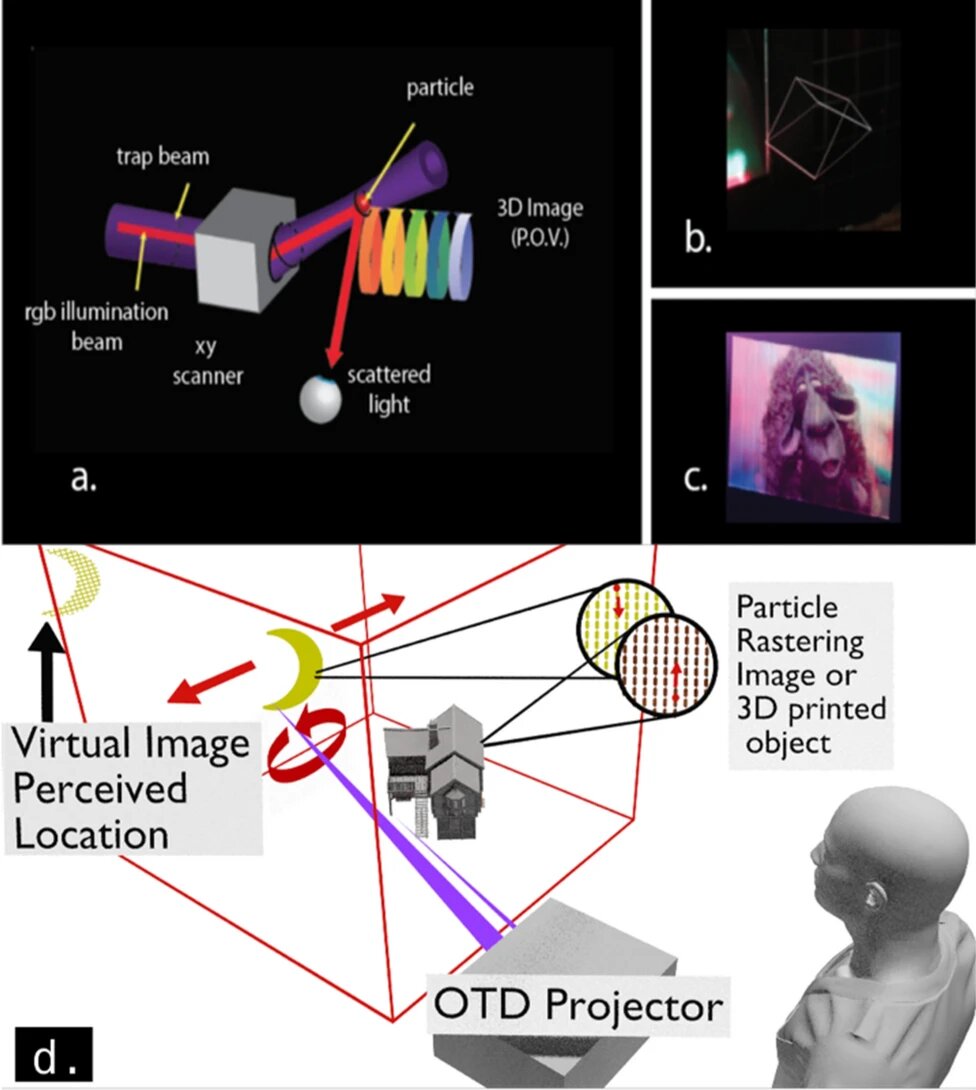
この作業では、光トラップに基づく光泳動イメージング(光トラップディスプレイからのOTD)を使用しました )、空中に平面オブジェクトと3次元オブジェクトの両方を作成できます( 1bおよび 1c)。
OTDを使用すると、ワークスペースのボリュームの端に画像を作成し、その画像がワークスペースのボリュームの背後にあるように見えるように、見かけの視差を変更できます( 1d)。この効果は「透視投影」と呼ばれ、OTDでは、観察者が移動するときに背景画像の平面上のオブジェクトのスケール、形状、視差を変更することで実現されます。この場合、平面が有限である(つまり球形でない)場合、平面自体も観測者の方を向くように回転できます。
以前の研究の著者は、制限があることを指摘しています-画像のすべてのポイントは、観察者からディスプレイのボリュームを通る線に沿っている必要があります。背面パネルでユーザーが知覚するドットは、物理的な散乱と一致しなくなったために3次元ではなくなり、理想的な調節*の属性を失います が、知覚される画像サイズを劇的に大きくすることができます。
調節*は、目の距離が変化したときにオブジェクトに焦点を合わせ続けることができる目の生理学的設定です。OTDは、透視投影を使用して、前景の実際の3D画像ポイントと背景のシミュレートされた非3D画像ポイントの両方を同時に生成できます。
デバイス理論
すでに理解しているように、光トラップイメージングは、1つまたは複数の粒子を光泳動トラップに保持することによって機能します。さまざまな作品で、閉じ込められた粒子の役割は、非常に異なる形状と寸法のさまざまな材料によって果たされました。この作業では、10ミクロンのサイズのセルロース粒子が使用されました。トラップが移動すると、粒子も一緒に移動し、画像のすべてのポイントを通過します。粒子が画像内の特定のポイントに到達すると、赤、緑、青の光の組み合わせで照らされました。
ある点を通る粒子の通過は1秒間に数回発生し、人に見える画像を作成しました( 1a)。人間の視覚システムは、1秒あたり10〜12フレームを処理し、それらを個別に認識できますが、高速は動きとして認識されます。したがって、1秒あたり10フレームは、このイメージング手法の説得力のある「背景」の下限と見なすことができます。
システムの解像度とリフレッシュレートが高いほど、観察者は表示された画像の更新を認識できないため、この効果はより説得力があります。
遠近法の最も一般的な形式の1つはレイトレーシングであり、観察者(人またはカメラ)は単一の点として扱われますE =(x 0、y 0、z 0)に加えて、画像の表示点X =(x、y、z)とPが表示される平面。線EXと平面Pの交点を見つけると、X座標がピクセル単位で得られます。透視投影は、線EOに垂直な平面Pの次の行列関係によって定義できます。ここで、Oは原点です
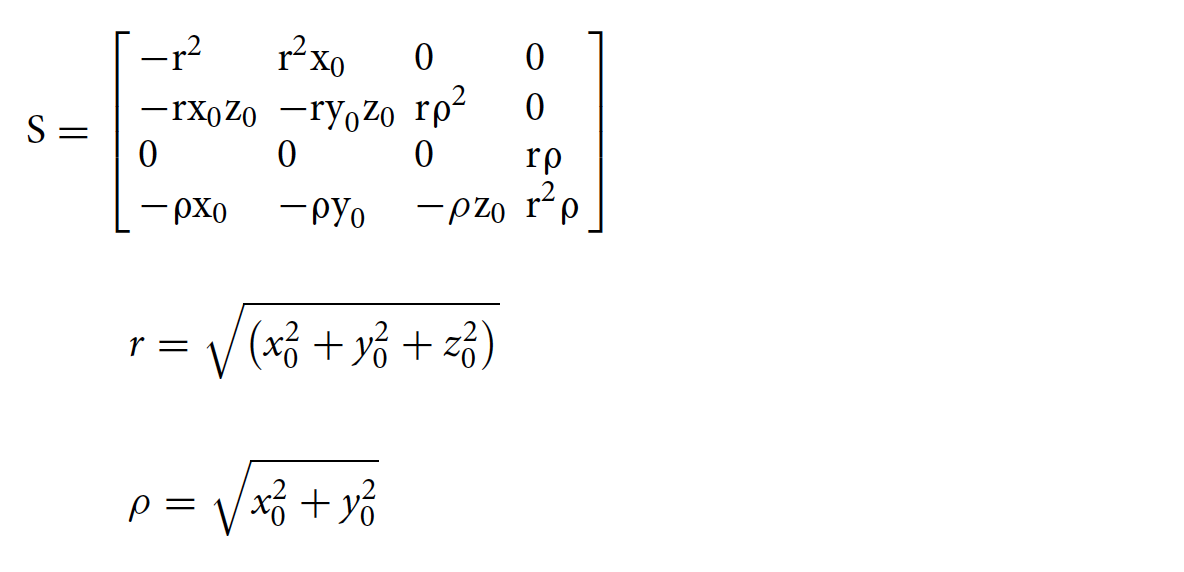
。透視投影行列は、空間から平面にシーンを投影するように設計されています。これにより、2Dサーフェスを使用して3Dポイントを表示できます。
デバイスの実地試験
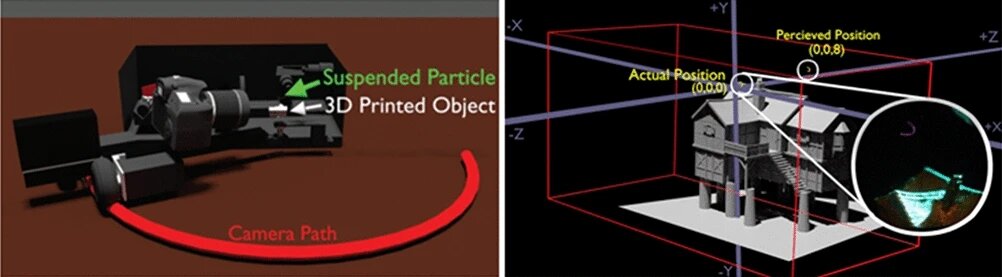
修正された視差(透視投影)を使用してシミュレートされた仮想画像を示すために、月のフラット(2D)OTD画像がワークスペースの背面に作成されました。この平面は、次に、家の3次元ミニチュアの前面にありました( 2b)。
画像2
カメラ(観察者)を回転三脚(2a)に置いた )。レンダリングされた月のフレームレートは、毎秒12フレームに維持されました。実験中にレンダリングされた1秒あたりのボクセル(体積ピクセル)の数は、1秒あたり約10,000でした。ベクター画像のリフレッシュレートは28Hzでしたが、速度が速いほど品質は低下します。そのため、周波数を12 Hzに下げて、ちらつきの影響を減らすことにしました。
OTD画像再生機能は、カメラアームの動きに合わせて透視投影を変更しました。カメラの移動速度は約0.0194m / sでした。カメラは家の煙突(約z = 2 mm)に焦点を合わせました。回転半径はカメラレンズの前端まで100mmでした。家の寸法は7.7x 10.6 x 7.4mmでした。月の初期直径は0.5mmで、その移動速度は毎秒12フレームでした。
研究成果

画像#3
において 図3a - 3C、それは変化をしないながら月は、参照画像を提供する、家(Z = 0 mm)での正面平面に「引かれます」。 3D - 3F、月は、依然として、Z = 0に描画されるが、カメラが回転するように、ムーンは、z = 8 mmに知覚されるオブジェクトに対応する視差を得ること側にシフトします。で、 3グラム- 3iをBlenderシミュレーションにオーバーレイされたカメラからのビデオ(両方とも透視投影が有効になっています)。この場合、デバイスの欠陥によるわずかなシフトがありますが、相対視差は高精度のシミュレーション結果と一致しています(平均誤差はわずか5.88%でした)。
実験結果の分析は、修正された視差が実際にワークスペースの後ろに知覚される画像を作成することを示しました。バイアスを考慮した後の修正視差は、シミュレーション結果との良好な一致を示しました。これは、ディスプレイの物理的境界を超えてボリュームディスプレイの表示スペースを増やす潜在的な効率を示しています。
上記の結果にもかかわらず、この手法にはいくつかの制限があります。 視差*がないこと、観察者の目の位置を追跡する必要があること、調節/輻輳*と他の視覚信号との間の不一致 です。
* — .
* — , .実験は、カメラを使用して実行されました。単眼。ホログラムイメージング技術が人間に有効であるためには、正確な両眼視差を実現する必要があります。そしてこのために、OTDは異方性散乱を制御している必要があります。
従来のOTD画像はユーザーの位置を知る必要がなく、ほぼ4πステラジアン*の画角を提供するため、観察者の追跡に関連する2番目の制限はかなり深刻な問題 です。
ただし、方向性のある散乱が達成された場合、オブザーバーの追跡は少なくとも2次元(水平および垂直)で排除できます。遠近法の投影は3次元の観測点に基づいているため、遠近法を完全に再構築するには、3次元(観察者から画像までの距離)が引き続き必要です。
ステラジアン*は、立体角を測定するための単位です。空間の一部。これは、特定のポイント(コーナーの頂点)から放射され、あるサーフェスと交差するすべての光線の和集合です。完全な立体角(完全な球)は4πステラジアンです。
最後の制限は、ユーザーが投影面に焦点を合わせるようにする調節マークと、視聴者が知覚される点に焦点を合わせるようにする視差マークとの間の不一致です。立体視*と調節の間のこの不一致は 、観察者に有害な副作用を引き起こす可能性があります。
立体視*-物体までの形状、サイズ、距離の両眼知覚。空間の深さの主観的な感覚。悪影響を軽減するために、視差が調節よりも重要である距離に透視投影面を配置する必要があります。
研究のニュアンスについてのより詳細な知識については、科学者のレポートを調べることをお勧めします 。
エピローグ
この研究では、科学者が初めて、光トラップを備えたディスプレイ上の虚像と同様の効果を生み出すためのOTDの実用化を実証しました。
これはすべて、2018年に彼らが行った科学者の仕事のおかげで可能になりました。その後、彼らは自由空間でオブジェクトを視覚化するための技術を作成することができました。この技術の基礎は、レーザーを使用して空気中の粒子をトラップする光トラップです。粒子が移動すると、トラップをたどり、レーザー照射された経路が空中に浮かんでいます。この技術の作者はそれを「光のための3Dプリンター」と呼んだ。
研究の著者によると、ほとんどの3Dディスプレイでは、視聴者が画面を見る必要がありますが、その設計により、物理的に存在する画像を自由空間に浮かせることができます。言い換えれば、これは実際のオブジェクトであり、ある種の幻想ではありません。
研究の著者が彼らの創造について話すビデオ。
将来的には、作品の作者は、デバイスの作業スペースを増やすなど、開発を改善する予定です。彼らによると、正しい動きの視差を選択すれば、実際に物理的に拡大することなく、視覚的に作業スペースのサイズを拡大することができます。科学者によると、このトリックは無限のサイズまでのディスプレイのような錯覚を生み出します。
映画、文学、ビデオゲームでの頻度を考えると、ホログラムは誰にとってもかなりうんざりしているかもしれません。ただし、現実の世界では、それらはまだ非常にまれであり、それらの機能は非常に制限されています。したがって、私たちが映画館でホログラムを賞賛(または嫌い)で賞賛する一方で、科学者はこの技術が空想科学小説ではなくなり、映画のヒーローと同じように現実的でありふれたものになるように懸命に努力し続けます。
ご清聴ありがとうございました。好奇心を持ち、良い一週間をお過ごしください。:)
ちょっとした宣伝
ご滞在いただきありがとうございます。あなたは私たちの記事が好きですか?もっと面白いコンテンツを見たいですか?注文や友人に推薦することにより、私たちをサポートして、 クラウドVPS $ 4.99からご開発者のための、 私たちはあなたのために発明したことをエントリーレベルのサーバのユニークなアナログ: VPSについて真実(KVM)E5-2697 v3の(6つのコア) 10GB DDR4 480GB SSD 1Gbpsが19ドルから、またはサーバーを正しく分割する方法は?(RAID1およびRAID10、最大24コアおよび最大40GB DDR4で利用可能なオプション)。
アムステルダムのMaincubesTier IVデータセンターでは、Dell R730xdの方が2倍安いですか?唯一の我々は 2×インテルテトラデカコアのXeon E5-2697v3 2倍の2.6GHzの14C 64ギガバイトDDR4 4x960GB SSD 1Gbpsの$ 199 100テレビオランダ!Dell R420-2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB-99ドルから!ビルのインフラストラクチャを構築する方法についてお読みください 。1ペニーで9000ユーロの費用でDellR730xd E5-2650 v4サーバーを使用するクラス?