訓練専門家向けのシミュレーター(シミュレーター)の視点から人的ミスについての話題を続けます。これまでのところ、多くの教育者はテストとシミュレーターの間に大きな違いが見られないので、いわば、この問題の「深さ」を示します。
まず、人事活動プロセスにおける「位置」に応じたエラーの分類は、人事活動プロセスの多くのモデルでも広く表されています。原則として、このようなモデルはアプリケーションの範囲にも大きく依存しています。業界。
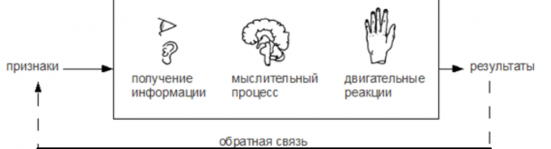
フィードバックシステムの人間のオペレーター
次に、図に基づいて示した最も近代的なユニバーサルモデルの1つを検討します。このモデルの選択は、認知行動と身体行動の最小の区分によるものです。このモデルは他のモデルと矛盾せず、一般化されています。

人事活動プロセスの例(行動モデル)
「人的要因」によるエラーは、実際には、人事活動プロセスの1つまたはいくつかの段階でのエラーを意味します。したがって、人的要因によって引き起こされるリスクの可能性を減らすには、提示された各段階でエラーの数を減らす必要があります。ステージは、生産プロセスの一部として、労働プロセスのシーケンスとして理解されます-実際の労働活動と、専門家の管理下にある関連する機械的、物理化学的およびその他のプロセスの組み合わせ。労働プロセスは、順番に、操作、技術、行動、労働運動に分けられます。
検出、診断、意思決定について詳しく見てみましょう。
検出

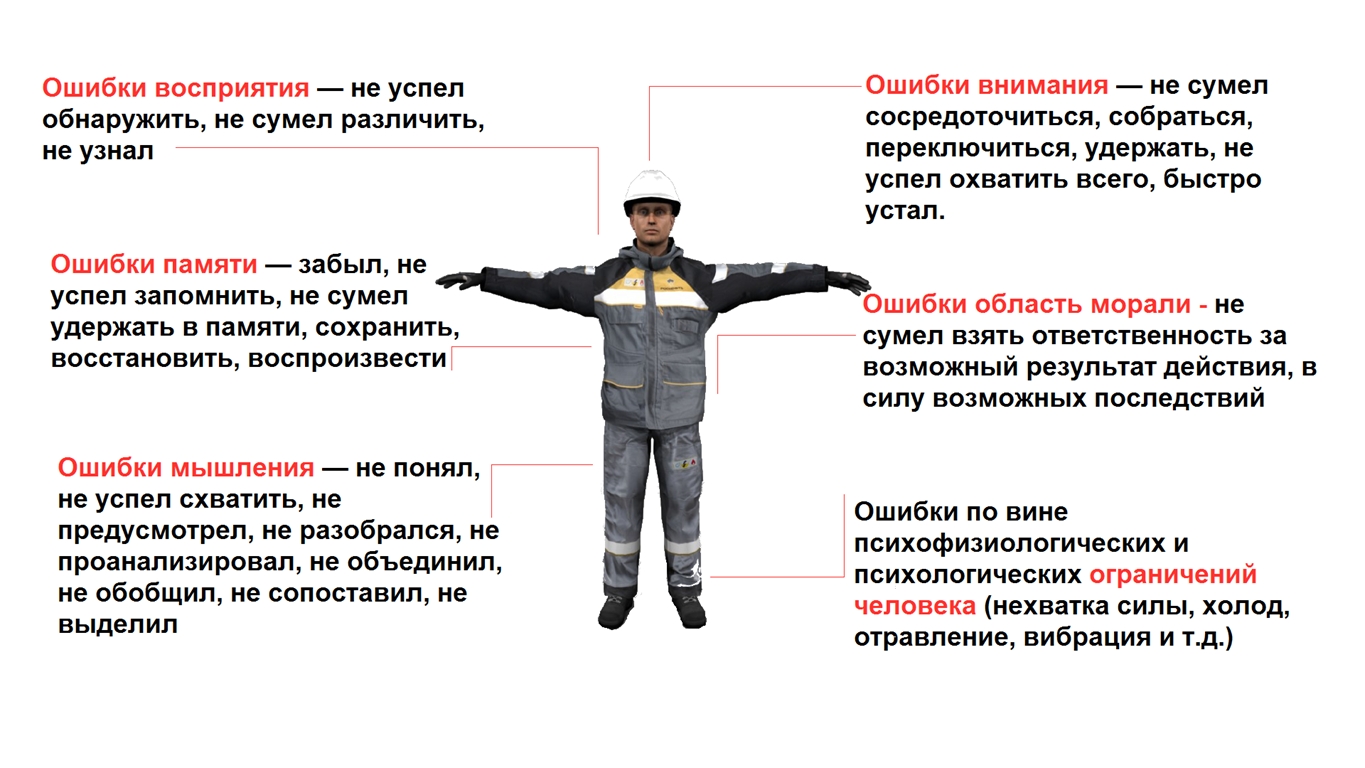
検出の知識、スキル、および能力は、別のカテゴリのエラー-知覚のエラー(注意のエラーを含む)に直接関連しています。このタイプのエラーは通常、次の点で異なります。
- 知覚エラー-検出する時間がない、区別できない、認識できない、正しく解釈されていない(危険な状況の兆候、許容可能な逸脱などの知識がある場合)。
- 注意-私は集中することができず、自分自身をまとめることができず、切り替え、ホールド、すべてをカバーする時間がなく、すぐに疲れました。
- 危険な状況の兆候、許容範囲、検査および管理期間などに関する知識や経験の欠如
現在、さまざまな領域のさまざまな種類の人の検出エラーを明確に示す統計があります。次に例を示します。
- M.A. Kotik、A.M。Emelyanov -車両の運転例における人間の操作ミスの性質。
- ポールフィッツエンジニアリング心理学と機械設計:実験心理学(S.スティーブンス編)、第2巻、943ページ。
- Strelkov Yu。K.工学および専門心理学。M。:アカデミー、2005年。
これらの統計から知覚と注意に関連するエラーを特定すると、シミュレーターを使用して検出するために必要な知識、スキル、および能力の形成のフレームワークでより慎重な研究を必要とする多くの研究から次のデータを引用できます。(これはシミュレーターの要件に影響するため)
表。信号と計器の測定値に応答してパイロットが行った270エラーの分類。[Strelkov Yu.K.著 工学と専門心理学]

検出の知識の形成(制御)
検出の知識を形成するために、生徒は以下を覚えておく必要があります。
- 「監視」する必要のある測定デバイス、正確に測定値を読み取る方法、測定値の変化を確認する必要がある頻度または頻度
- 既存の危険区域、および危険区域内の人員または異物の存在、煙などに関連する潜在的な危険源。
- 注意と定期的な目視検査を必要とする機器の特徴的なスポット;
- 機器の動作または振動の音の特徴的な変化(触覚)。
- 警報装置の場所;
- 監視と注意の強化が必要なその他の機器とプロセス
言い換えれば、検出知識の形成は、次の情報の記憶を意味します。監視すべきもの、方法、頻度。たとえば、発電機の場合、次の症状を検出する必要があります。ベアリングの過度の加熱-温度計の観察(表示の読み取り)。ベアリングチャンバーからのグリースの漏れ-目視検査;運転中の機械の振動-運動感覚と音の振動;車のリズミカルなハム-音の振動;発電機巻線は、許容基準を超えて過熱します-温度計の観察(読み取り値の読み取り)など。
「グループの準備」は、グループの各メンバーが自分の「領域」のみを担当し、グループの他のメンバーを制御する必要がある場合に可能です。

検出知識の形成の有効性は、以下に依存します。
- , ( ).
- , , ( )
- «» ,
- (, , , ..);
- « » ( ) .
検出知識の形成の有効性の評価は、検出された変更を提示された変更の総数と比較することにより、テストを使用して行うことができます。たとえば、圧力の変化が検出された場合、学生はキーを押します。キーが押されていない場合、学生はこの変化に気づかなかったと見なされます。
結論:次の理由により、模倣者は必要な知識を効果的に形成できます。
- 彼らは事故のほとんどすべての兆候(温度、湿度などを除く)または潜在的に危険な状況を再現できます。特定の実際の機器で事故のすべての兆候を実証することは非常に難しく、潜在的に危険な状況を実際に再現することは非常に危険です。
- 知覚のすべてのチャネルを使用するため、記憶する情報の割合は、知識を形成する従来の方法(ポスター、ビデオ)よりも高くなります。
検出(制御)スキルの形成
学習者は、実際に(特定の問題を解決するときに)取得した(または既存の)検出の知識を適用できる必要があります。検出スキルの形成がなければ、実際の状況にある訓練生は、検出に多くの時間と労力を費やし、実行中の作業から一時的に気を散らされることになります。言い換えると、検出プロセスに一定の精神的努力が集中すると、他のプロセスに干渉し、疲労や注意力の低下などを引き起こす可能性があります。
スキルの形成と検出は注意に直接関連しています。認知科学では、注意は行動の制御メカニズム(内部制御)として理解され、その形成は学習とトレーニングによって決定されます。作業中[Boris Mitrofanovich Velichkovsky。認知科学心理学の基礎第1巻、304 pp。]多くの研究に基づいて、それが示されています-認知スキルの形成は、特に気晴らしの状態での仕事の成功を大幅に向上させます。これらの結果により、適切に構造化された学習とトレーニングにより、一見固定されていると思われる認知プロセスの多くの制限を克服することを期待できます。」
研修生における検出スキルの形成とは、メインプロセスからの長時間の注意散漫(実行されているアクション間の短い切り替え)なしに、実際に検出を行う研修生の能力を意味します。スキル形成の簡単な例は、「音節によって」または「単語によって」(「文字によって」ではなく)テキストを読む方法を学ぶことです。
発見知識の形成と同様に、「グループ準備」は、グループの各メンバーが自分の「領域」に対してのみ責任を負うが、グループの他のメンバーを制御する必要がある場合に可能です。
検出スキルの形成は、必要な作業(作業アルゴリズム)のパフォーマンスとともに、検出アクションを単純に繰り返すことによって達成されます。前提条件は、グループの各メンバーが自分の「領域」に責任を負う場合の、長期の個人またはグループのトレーニングです。
次の要因に特に注意する必要があります([Strelkov YK Engineering and Professional Psychology]のエラーの分類に基づいて):
- 矢印が数回転するデバイスがある場合、これらのデバイスの読み取り値の読み取りの速度と精度を個別に監視する必要があります。
- 値の変化率-急速またはゆっくり変化-および変化の方向-増加または減少を示す、楽器の解釈の正確さと速度。
- ( ), , ( , . .).
- , .
- « », . . , .
- .
- .
検出スキルの形成の効率:検出の知識の形成の効率を参照してください。
検出スキルの形成の有効性の評価は、検出知識のテストと同様に実行できます。ただし、学生がシミュレーター(作業アルゴリズム)で必要な作業を実行し、変更に「気付く」という事実だけでなく、変更間の経過時間(圧力など)も推定されます。圧力計)と学生の反応。経過時間が一定値以上の場合、「備考」の結果はカウントされません(大幅な遅延で変更が検出されたとみなされます)。
したがって、模倣者は必要なすべての条件を提供できるので、模倣者は必要なスキルを効果的に形成できると結論付けることができます(ポスターやフィルムよりも効率的です)。スキルの長期「個別」トレーニングの可能性も、シミュレータの有効性を高めます。
検出スキルの形成(制御、反応)
学習とトレーニングの助けを借りて注目がさらに高まると、アクションの自動化が発生し、「検出」の調整プロセスは意識的な制御のみで決定されなくなります-スキルの形成が始まります。スキル形成のメカニズムを研究するには、現在十分に研究されている知覚の生理学的プロセスの研究結果を参照する必要があります。
情報を知覚するプロセスは、観察システム(無条件反射のレベル)に対する知覚システムの生理学的調整から始まり、思考レベルでの意識的な選択と情報の処理の段階で終わります。感覚系の生理学および知覚の問題の心理学研究の分野から入手可能なデータは、人が支配的な分析器(視覚、聴覚、運動感覚)を使用して、最初に情報を知覚することを示しています。主要なアナライザーは視覚ですが、視覚的イメージの(脳による)知覚のプロセスでは、視覚だけでなく他の感覚も関与しています。原則として、全体の応答時間は反応時間または継続時間として理解されます。私たちが感じていることは、支配的なアナライザーの作業に20%しか依存していない、80%は、受け取った情報を処理する中枢神経系の能力によって決まります。
視覚システムの動的機能(改善)。原則として、静的な視覚のみが制御されますが、急速に変化する状況では、担当者は視覚システムの動的な機能に大きく依存します。
視覚システムの動的機能のテストとトレーニングは、主に次の2つの理由で重要です
。1.人間の視覚は、視野全体にわたって継続的かつ等しく明確に知覚することができません。全体としての明確な認識のために、人はいくつかの重要な場所で彼の視線をすばやく修正しなければなりません。
2.全体像を0.15〜0.2秒の時間遅延で確認します。これに関連して、視線を誘導するアルゴリズムを習得し、無意識の予測行動の形成のために視覚と筋肉の反応の関係を確立する必要があります。
認識プロセスは、条件付きで、互いに続く個別のステージに分割できます。最初に受信した情報を単一のフレームに追加するために一定の時間を費やし、次にその後の分析と解釈に費やします。視線を固定した後の最初の0.04秒では、人は何も見えません(脳は1つのフレームを追加します)。0.04から0.06秒の観察間隔で、輪郭(形状の断片)が固定され始め、0.06から0.16が発生します。観察された画像が以前に見られたものの続きである場合、画像の着色、および0.16〜0.2〜0.3秒で画像全体、またはパノラマビューの別のフラグメントが形成されます。 0.16から0.2-0.3秒までの間隔で。メモリに保存された画像との比較が終了し、彼が見たものの可能な限り最大の解釈が行われます。
脳は網膜から受け取った「生の」情報を処理し、個別の部分に自動的に分割するため、実際には気付かない。さらに、視線が空間をスキャンしているときに目が動いている場合、脳によって構築された画像はより完全に見えます(この時点での視線の中央部分は、ホテルオブジェクトに関する詳細を収集しています)。これがまさに、「作業」スペースを順番にスキャンしながら、担当者が目をリードする方法です。機器の設置場所、人員の設置場所を一瞥して、全体的な職場の状況を評価する。視線を動かさずに一方向を常に見ることは受け入れられません(これはスタッフのよくある間違いです)。
原則として、視線を正しく導く能力の発達は、乗務員、アスリート、ドライバーなどの訓練中に強制的に発達させられます。
動いているオブジェクトの動きを監視する場合、最初に目で焦点を合わせる必要があります。次に、人間の脳がオブジェクトからの距離とオブジェクトの動きの速さを計算し、その軌跡を予測してから、事前に予測された新しいポイントをすばやく確認します。このプロセスには約0.15秒かかります。視線を移す瞬間、知覚は失われ、一瞬、まばたきのように「盲目」になります。何らかの理由でビジュアルシステムの予測の間にオブジェクトがその軌道を大幅に変更すると、視線ガイダンスの予測は誤ったものになり、視覚システムは知覚を回復するために追加の時間を費やす必要があります(オブジェクトに再び焦点が当たると、新しい軌道が計算されます)。
知覚の問題の研究から入手できる証拠は、明確な結論につながります。
- 視覚情報の知覚は習得されたプロセスであり、誕生から完全に私たちに与えられていません。それは、人生経験と特定の訓練を蓄積する過程で形成され、改善されます。
- 急速に変化する環境を知覚するための正しいアルゴリズムを習得していない人々は、検眼医に確認する視力に関係なく、はるかに詳細が見えません。
- 正しい視線ガイダンスのアルゴリズムを習得した人は、環境のより多くの機能と詳細に気づきます。
- , , «» . , , «», , , .
- , .
- , , 40—70%
- (1948) , . , , {119} 40%.
- Geratevolはトレーニングを通じて、反応時間が最大70%短縮されたことを発見しました。

画像。シミュレーターのインジケーターを順番に照らして正しい視線ガイダンスのアルゴリズムを計算する

知覚エラーと情報の歪み

ほとんどの場合、主要なアナライザーからの情報の解釈は正しいですが、知覚エラーが発生する場合があります。最も有名な錯覚は視覚に関連しており、触覚、音などの知覚にエラーがあります。視覚的な錯覚と現象[http://www.psy.msu.ru/illusion/]:
- 奥行き知覚錯視
- 視覚的な歪み
- サイズ知覚錯覚
- 色とコントラストの錯覚
- 後遺症
- 動きの錯覚(たとえば、近くの車がゆっくり動き始めた瞬間に、車が後退し始めたように見える錯視)
- 知覚準備などの影響
視覚システムの他の制限(低光、高光、露出の変化)。
結果として生じる相互接続と、異なる感覚チャネル間の競合は、マイナスの影響(脳の疲労など)を起こすことがあります。シミュレーターの助けを借りて、ほとんどの錯覚と歪みを再現することができます。つまり、そのようなケースの認識に必要なメカニズムを開発(形成)し、研修生のそれらに対するより注意深い態度を開発することが可能です。
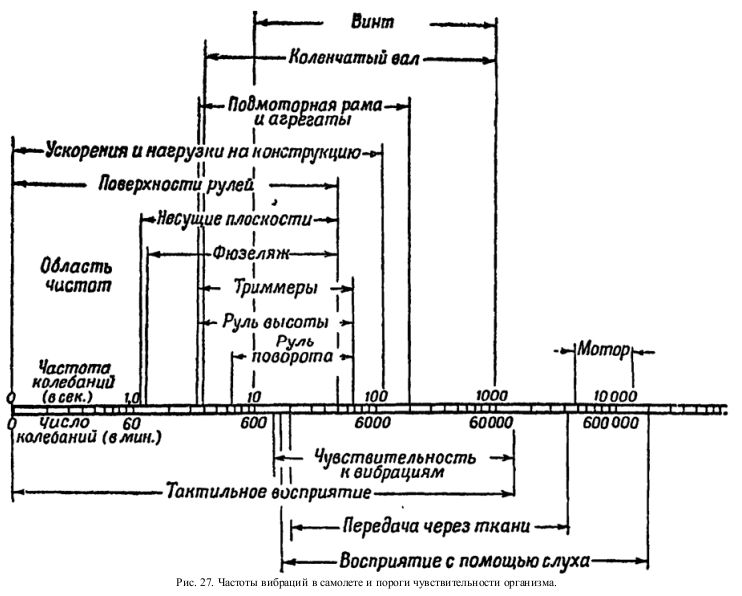
視覚システムから聴覚および触覚感覚に移行すると、個別に強調表示できます。
- 触覚;
- 振動感度;
- 組織を介した感覚の伝達;
- 聴覚等による知覚
この図は、操縦中にパイロットが受信した情報を示しています。
検出スキルの構築
必要な作業(作業アルゴリズム)を実行しながら、検出アクションを繰り返すことによって実現されます。前提条件は、グループの各メンバーが自分の「領域」に責任を負う場合の、長期の個人またはグループのトレーニングです。スキルの形成との主な違いは、正確に知覚プロセスの正しいメカニズムの開発と適用(たとえば、パネル上のいくつかのインジケーターを読み取るときの目の動きの軌跡)と、検出時に実行されるアクションの自動化です。検出スキルの形成の効率:検出の知識とスキルの形成の効率を参照してください。また、モーションキャプチャシステム(瞳孔の動きを含む)を使用して情報を取得し、生徒の行動の正しさを評価することができます。
検出スキルの形成の有効性の評価は、検出スキルのテストと同様に実行できます。
したがって、模倣者は必要なスキルを効果的に形成できると結論付けることができます。これは、模倣者がこれに必要なすべての条件を提供できるためです(ポスターやフィルムよりも効率が高くなります)。さらに、実物大のデモンストレーションなどの重要な利点を提供します事故、外部の気晴らし(雨、風)の影響下でのトレーニングなど
診断の精度は、検出がいかに効果的に行われるかに依存します(検出に関する効果的なトレーニングがなければ、担当者は危険に気づかないか、遅すぎることに気づかない場合があります)。
診断
診断のプロセスでは、検出されたパラメーターの標準からの偏差の許容性(期待される)またはその非許容性について決定が下され、その後、考えられる問題を解決または補償するための意思決定段階に移行します。
したがって、診断中に次の主なエラーが発生する可能性があり
ます。誤動作の省略または危険な状況。
「誤警報」。
, . . , , , . - . - , . , . , , .
診断知識の形成診断知識の形成は
、誤動作(または脅威)のすべての直接的および間接的な兆候、誤動作(または脅威)の外部兆候、障害基準、および最大許容値または状態を記憶することによって達成されます。次に例を示します。
- 最大許容値を超える圧力(温度、流量、電流)の超過または減少;
- グリース、振動、ハム、笛、異音の漏れ;
- 煙、火花;
- 音と光のアラーム作動の兆候;
- 安全弁作動の兆候。
- ロープ、ベアリング、バルブなどの損傷または摩耗の兆候。
- 脅威の兆候(危険地帯にいる職員の存在など)など
診断知識の形成の有効性は、事故の1次および2次の兆候または危険な状況の兆候の再現(デモンストレーション)の品質に依存します。この場合の品質とは、学習プロセスと実際の状況における事故の兆候(類似性)の認識の違いとして理解する必要があります。また、必要に応じて「グループトレーニング」を実施できるかどうかにも依存します。
診断知識の形成の有効性の評価は、誤動作の検出された兆候を発生した誤動作の総数と比較することにより、テストを使用して実行できます。たとえば、圧力の最大許容値を超える変化を診断するときに、研修生はキーを押します。キーが押されていなかった場合、研修生は気づかなかった、または重要ではないと見なしたと見なされます(誤動作または危険な状況をスキップします)。キーが押され、誤動作や危険な状況がなかった場合(すべての測定値は正常です)、「誤警報」エラーが記録されます。
出力:
シミュレーターは、診断知識の形成(知覚のすべてのチャネルを使用して外部の兆候と兆候を示すことによる)と、診断の正しさとその修正の検証の両方に正常に使用できます。「オブジェクトの内部を見る」ためのシミュレーターの機能およびその他の機能は、情報の理解に大いに役立ちます。したがって、シミュレータを使用すると、情報の記憶の最大レベルを達成できます。
診断スキルの形成
検出スキルの形成と類似して、学生は診断の習得した(または既存の)知識を実際のアクティビティ(特定の問題を解決する場合)に適用できるはずです。検出スキルの場合と同様に、診断スキルが形成されない場合、実際の状況にある訓練生は、迅速な診断に時間と労力を費やしすぎ、実行される作業から一時的に気が散らされます(疲労、注意力の低下などの影響も可能です)。 ...
学生の診断スキルの形成は、メインプロセスから長い間気を散らすことなく、実際に診断を行う学生の能力を意味します。検出の場合と同様に、時間の経過に伴う診断プロセス(トレーニング)の繰り返しは、最初に、新しいアクションのパフォーマンスが高レベルで発生し、完全に実現された後、次第に自動化されるいくつかの操作に分割され、より低い値を見つけます、バックグラウンドレベル。これに基づいて、スキルの形成には、必然的に検出スキルのトレーニングと併せて、長期の個人トレーニングと診断のためのアクションの開発が必要です。
診断スキルの形成は、必要な作業(動作アルゴリズム)の実装と共に、診断アクション(検出とともに)を単純に繰り返すことによって実現されます。前提条件は、グループの各メンバーが自分の「領域」に責任を負う場合の、長期の個人またはグループのトレーニングです。
診断スキルの形成の有効性:診断知識の形成の有効性を参照してください。
検出スキルの形成の有効性の評価は、診断知識のテストと同様に実行できます。ただし、学生がシミュレーター(作業アルゴリズム)で必要な作業を実行し、障害や危険の存在を確認する事実だけでなく、学生がこのプロセスに費やした時間も異なります。経過時間が一定値を超えた場合、結果はカウントされません(誤動作や危険の診断がされていない、または大幅な遅延があったと考えられます)。
原則として、診断プロセスの次の段階が区別されます。
- 状況の分析;
- 既存のすべての問題または潜在的な脅威の特定、それらのランク付けおよび最大の潜在的な危険をもたらす問題の選択;
- 潜在的な危険の兆候がある場合、起こりそうな出来事の進展を評価し、起こり得る望ましくない結果を決定する必要があります。
- 望ましくない結果が発生する、または発生する可能性がある理由を特定する。
したがって、次の主なエラーが発生する可能性があります。
- 起こり得る結果の誤った判断;
- 理由の誤った決定。
したがって、シミュレータは必要な診断スキルを効果的に形成できると結論付けることができます。これに必要なすべての条件を提供できます:
- すべての起こり得る障害、事故、またはインシデントの実装と、必要な作業(アルゴリズム)の実行。
- エラーの特定とその修正;
- 個人またはグループでの長期トレーニングやその他のメリットの可能性。
診断スキルの形成
個人またはグループの長期トレーニングの助けを借りて診断スキルがさらに発達すると、アクションの自動化が行われ、診断プロセスは意識的な制御のみで決定されなくなります-診断スキルの形成が始まります。診断スキルの形成により、作業中の疲労、不在が軽減され、プロセスへの注意の集中度が高まり、反応率が高くなります。
診断スキルの形成は、必要な作業(作業アルゴリズム)の実行とともに、検出と診断のアクションを繰り返すことによって達成されます。前提条件は、グループの各メンバーが自分の「領域」に責任を負う場合の、長期の個人またはグループのトレーニングです。
診断スキルの形成の有効性:診断知識の形成の有効性を参照してください。
診断スキルの形成の有効性の評価は、診断スキルのテストと同様に実行できます。
したがって、模倣者は必要なスキルを効果的に形成できると結論付けることができます。これは、模倣者がこれに必要なすべての条件を提供できるためです(ポスターやフィルムよりも効率が高くなります)。さらに、実物大のデモンストレーションなどの重要な利点を提供します事故、外部の気晴らし(雨、風)の影響下でのトレーニングなど
決定の正確さは、診断がどの程度効果的に実行されるかに依存します。
意思決定
, , 90% - . , - . . : , , , . , . , . , 25—40% .
思考の特性と性質:
- 独立性-新しい問題を確認し、新しい質問を提起し、自分で問題を解決する能力。
- 深さ-現象の本質への浸透度。
- Latitude-問題を解決しながら、オブジェクト、オブジェクト、現象間の多数の接続を制御する機能。
- 柔軟性-問題を解決するためのさまざまな方法を見つける能力、および問題を解決する過程で見つかった条件を満たさない場合は、意図したアクションプランを変更する能力。
- 重要性とは、客観的な条件を正しく評価し、必要に応じて自分の活動を評価し、選択したソリューションを放棄して、新しい行動方法を見つける能力です。
- スピードとは、情報に基づいた適切な決定をすばやく見つける能力です。
仮説を生成およびテストするためのメカニズム。状況のすべての新しい兆候が含まれ、イベントの原因に関する仮定を反駁または確認する
場合、この場合、ソリューションを実装するための適切なルールを検索して(たとえば、ポンプをオフにしてから、閉塞を取り除いてポンプを再起動する)、
またはバックアップポンプをオンにすることができます。
これは可能です。いくつかの中間目標を設定して達成することにより、プロセスの構造に関する基本的な知識が関与する場合のみ。つまり、必要な中間ステップのシーケンスを選択することであり
、利用可能な経験に大きく依存します。実際には、考えられる誤動作(または脅威)とそれらを排除する方法の表全体を覚えておく必要があります。次に例を示します。
誤動作(または脅威)の外部症状の名前と追加の兆候(故障の基準と限界状態)-圧力と性能の低下、振動、騒音[キャビテーションの始まりの兆候]
考えられる原因
- ポンプ流量が公称値を上回って増加するか、シャフト回転速度が増加します
- 吸引ラインでの抵抗の増加(吸引での絞り、フィルターの詰まりなど);
- 技術的な理由によるポンプ入口の圧力の低下(供給装置のレベルの低下);
- 汲み上げられた製品の温度の上昇またはそれに溶解したガスの含有量の増加
考えられる望ましくない結果-キャビテーションによるポンプ作動部品の破壊
検出時のアクション-a)チェック... b)レポート... c)実行...
シーケンス:
- 問題の定式化。
- 意思決定のための制限と基準の策定。
- 代替案の特定。
- 代替案の評価。
- 代替の選択。
- ソリューションの実装。
- 決定の実行を制御します。