
するロボットを開発しています。ボールドロップハッチを開くには、サーボが必要です。私たちは非常に多くの数をテストしてきましたが、今日は価格の半分以上の非常に興味深いアナログダイナミクセルについてお話ししたいと思います。
今日の最新モデルのサーボドライブは、単一のハウジング(ギアボックスと制御ボードを備えたモーター)内の完全なデバイスを表しています。モデルサーボを制御する最も一般的な方法はPWMプロトコルです。サーボモーターの位置はパルス幅によって決定され、パルスの存在はイネーブル信号として機能します。このアプローチでは、電子機器を可能な限り簡素化できますが、問題がないわけではありません。
まず、フィードバックがなく、同様のプラットフォームを備えたPCへの接続にも問題があります(通常、中間層としてArduinoまたは別のマイクロコントローラーが必要です)。次に、プロトコルの特性により、位置決め精度がサーボ範囲(270または180度)あたり1 \ 256を超えることはめったにありません。第三に、機械的な故障や過熱は検出できません。これらの問題はすべて、そのようなサーボを高い精度で多数の角度を一貫して制御する必要があるタスクで使用できないという事実につながります。
これらの問題を解決するには、共通のデータバスを使用する必要があります。人気のある完全なソリューションは、よく知られているダイナミクセルサーボモーターです。プロトコルは通常のuartと互換性があります(単純な交渉スキームが必要です)。このポート(Arduino、Raspberry、pc)を備えた任意のコンピューターに接続できます。このアプローチにより、サーボドライブの動きを同期し、フィードバックを受け取り、パフォーマンス(エラー、温度)を監視し、PIDコントローラーを調整できます。配線も簡単になり、サーボを直列に組むことが可能になりました。メーカーは、すべての味と色について幅広いモデルを持っています。ただし、価格は従来のPWMサーボドライブをはるかに上回っています。
そして国産サーボを手に入れましたイリューシャDynamixelプロトコルv1に完全準拠。どんな獣なのか、何ができるのか。私たちはそれをテストすることに決めました、そして、それから何が来たのかを以下で教えます。
基本的なパラメータ
電源電圧6-15V
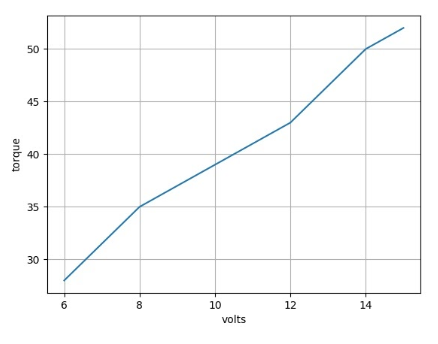
最大トルク60キロ*センチ
エンコーダ分解能16384オウム360度
保護過熱に対する
電流保護
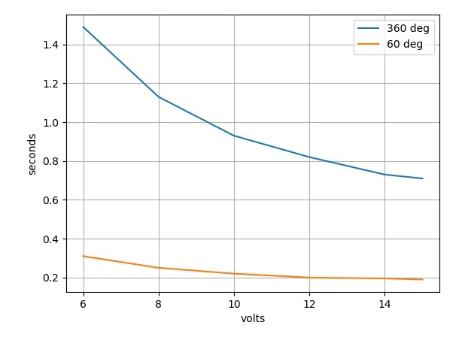
まず、我々は、電圧の範囲で無負荷時の回転速度を測定する
6、10、12、14、15 V
そして今、我々は最大を測定します同じ電圧値でのモーメント:
60度の移動の遷移時間。
そして今、最も不愉快なのはギアボックスのバックラッシュです。
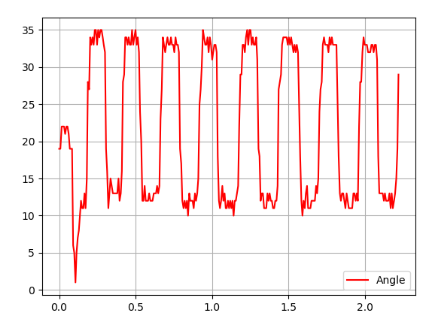
これから、バックラッシュは約0.5度であると結論付けることができます。

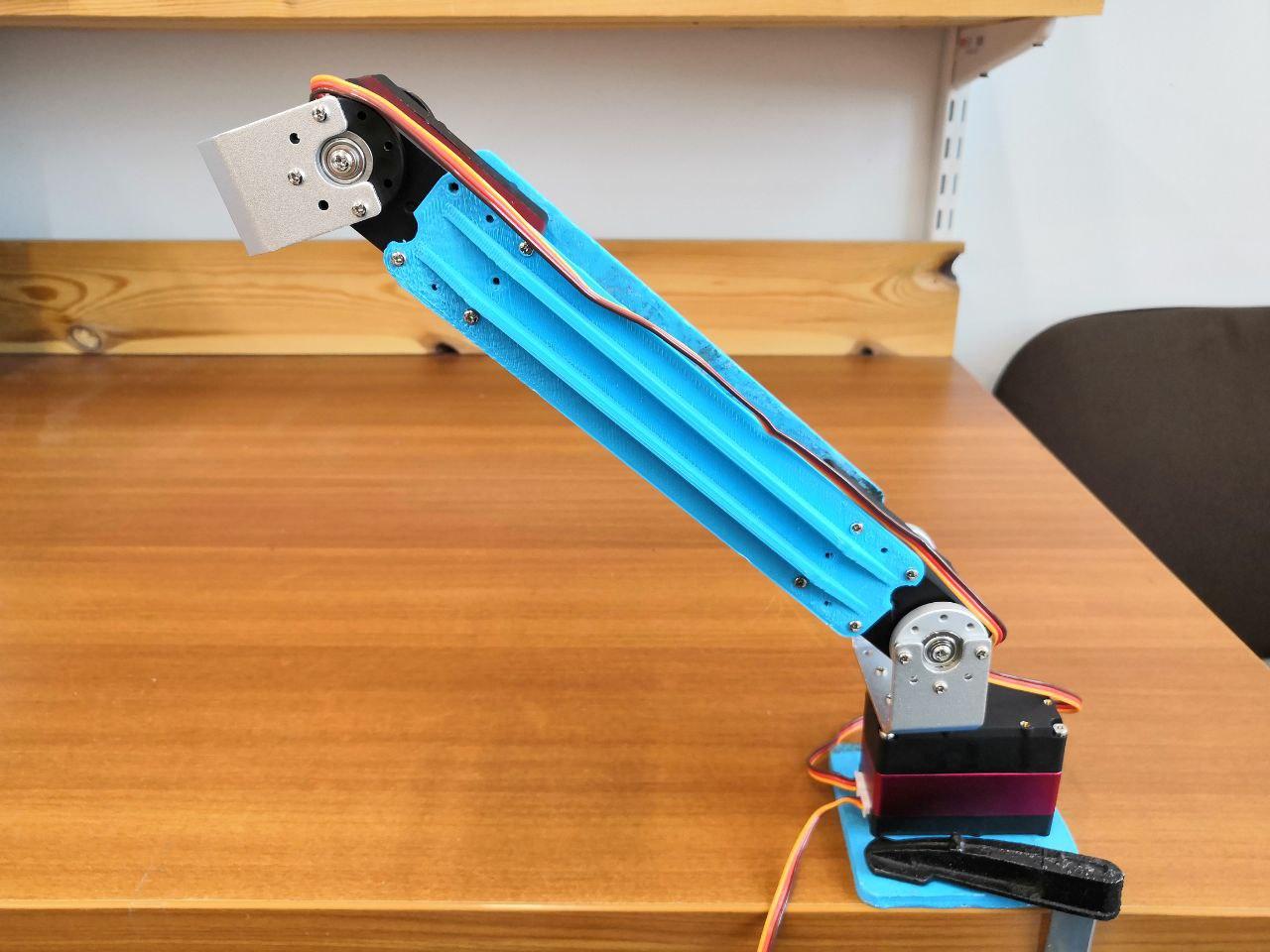
特性は私たちの目的に適しています。価格が2分の1以下であることを考慮して、これらのサーボをデバイスで使用することにしました。