2017年以来、私はさまざまなコンピュータービジョンを実行してきました。明確な検出と分類から、読唇術までです。
そして、一連の事故の後、私は無人ヘリコプターを製造するスタートアップの中で唯一のコンピュータービジョンエンジニアであることに気づきました。このため、私はコンピュータービジョンの脚に侵入し、ドローンに関連するペットプロジェクトを行うことにしました。
計画は次のとおりです。カメラ、自動操縦装置、およびいくつかのエッジの鉄片(ドライブニューロンおよびその他のCV)を使用して二次曲面を組み立てるだけで、プラスマイナスのユニバーサルフライングプラットフォームを取得できます。たとえば、これと同じですが、より柔軟で安価です。そして、興味深いアプリケーションがたくさんあります。人を検出して追跡することから、強化学習を使用してクワッドコプターを制御することまでです。
これが私の8か月の旅の始まりです。aliexpressの最初のコンポーネントのアイデアと注文から、クワッドコプターによる搭載された視覚オドメトリの完全な使用とそれに沿った飛行までです。
記事の最初の部分(数段落後!)では、このタスクのためにクワッドコプターを組み立てるために使用したコンポーネント、選択する際にガイドされたもの、および飛行させるために考慮すべきことを説明します。
( !) , , GPS, visual SLAM.
,
450 ( 450).

. : . - . , tradeoff \.
,

-, . , , ¯\_(ツ)_/¯
( AliExpress) . 700KV (← ; , KV ). KV.
,
( ), , , , ( ).
: , , 10 . 10, , , , .
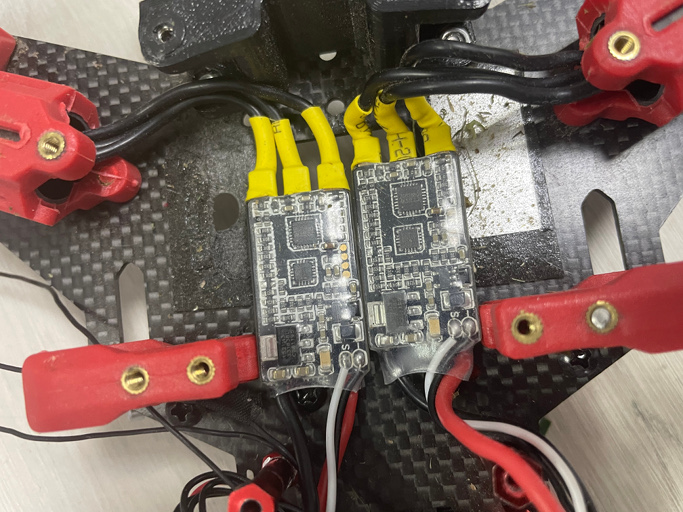
ESC. DShotXXX ( XXX, )
, software , ESC ( ArduPilot PX4, )
,
( — XXYY): ( ). . ? . .

, , : - .
, . 1145.
, . , , . - , - :)
( ): 1) ( ) 2) .
,

( "") .
: . , , . 4S Li-Po , 5000 mAh. . , ( ) 20 .
,

(\) . .. . , . ( ) FrSky (Taranis X10 lite FrSky R-XSR). , , \.
"" RadioMaster. , FrSky , .
,
software stack (state estimation, , ), hardware ( software stack ).
Hardware , ( IMU, , ).

( + GPS, , ), , .
- . .. - . open-source , ( ): ArduPilot PX4.
ardupilot ( , ) 2020- hardware - pixhawk 4 mini.
, companion computer

, . companion computer , , - path planning, external navigation, + task specific .
: Intel Movidius, Google Coral, Jetson . Raspberry c .. , "" .
Jetson-e Nano ( ) (TensorRT), GPU .. - CUDA ( CUDA, , ?), SLAM .
,
Intel RealSense D435, , RGB . Raspberry Pi c MIPI .. 3D , - , .
, , , rolling shutter .. , .
, !
, (, ) !
, , :
Getting Started. . , .
, companion computer . , .
, , . , , ( , ESC).
, .
, ( ⇒ ).
Loctite ( ), ( , ). - .
( ), , .
( GPS), .
. : , . LiPo 4.2v. , "" , ( 3.5-3.6v)
, ?
, : .
- . (), .
その結果、手動モードで飛行するのは非常に退屈なドローンになります。飛行する場合は、路上でのみ、屋内での使用には大きくなります。しかし、DimDroneは、さまざまなコンピュータービジョンアルゴリズムをテストおよび研究するための優れたプラットフォームとして機能します。